vgg和PyTorch
1.vgg:
由于使用图片数量过多,耗时久,这里仅取其中四百张图片。
代码片段:
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers, regularizers
import numpy as np
import os
import cv2
import matplotlib.pyplot as plt
os.environ["CUDA_VISIBLE_DEVICES"] = "1"
resize = 224
path ="D:/pc/data/seven/strain/"
def load_data():
imgs = os.listdir(path)
num = len(imgs)
train_data = np.empty((200, resize, resize, 3), dtype="int32")
train_label = np.empty((200, ), dtype="int32")
test_data = np.empty((200, resize, resize, 3), dtype="int32")
test_label = np.empty((200, ), dtype="int32")
for i in range(200):
if i % 2:
train_data[i] = cv2.resize(cv2.imread(path+'/'+ 'dog.' + str(i) + '.jpg'), (resize, resize))
train_label[i] = 1
else:
train_data[i] = cv2.resize(cv2.imread(path+'/' + 'cat.' + str(i) + '.jpg'), (resize, resize))
train_label[i] = 0
for i in range(200, 400):
if i % 2:
test_data[i-200] = cv2.resize(cv2.imread(path+'/' + 'dog.' + str(i) + '.jpg'), (resize, resize))
test_label[i-200] = 1
else:
test_data[i-200] = cv2.resize(cv2.imread(path+'/' + 'cat.' + str(i) + '.jpg'), (resize, resize))
test_label[i-200] = 0
return train_data, train_label, test_data, test_label
def vgg16():
weight_decay = 0.0005
nb_epoch = 10
batch_size = 32
# layer1
model = keras.Sequential()
model.add(layers.Conv2D(64, (3, 3), padding='same',
input_shape=(224, 224, 3), kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.3))
# layer2
model.add(layers.Conv2D(64, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
# layer3
model.add(layers.Conv2D(128, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer4
model.add(layers.Conv2D(128, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
# layer5
model.add(layers.Conv2D(256, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer6
model.add(layers.Conv2D(256, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer7
model.add(layers.Conv2D(256, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
# layer8
model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer9
model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer10
model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
# layer11
model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer12
model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.Dropout(0.4))
# layer13
model.add(layers.Conv2D(512, (3, 3), padding='same', kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
model.add(layers.Dropout(0.5))
# layer14
model.add(layers.Flatten())
model.add(layers.Dense(512, kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
# layer15
model.add(layers.Dense(512, kernel_regularizer=regularizers.l2(weight_decay)))
model.add(layers.Activation('relu'))
model.add(layers.BatchNormalization())
# layer16
model.add(layers.Dropout(0.5))
model.add(layers.Dense(2))
model.add(layers.Activation('softmax'))
return model
#if __name__ == '__main__':
train_data, train_label, test_data, test_label = load_data()
train_data = train_data.astype('float32')
test_data = test_data.astype('float32')
train_label = keras.utils.to_categorical(train_label, 2)
test_label = keras.utils.to_categorical(test_label, 2)
#定义训练方法,超参数设置
model = vgg16()
sgd = tf.keras.optimizers.SGD(lr=0.01, decay=1e-6, momentum=0.9, nesterov=True) #设置优化器为SGD
model.compile(loss='categorical_crossentropy', optimizer=sgd, metrics=['accuracy'])
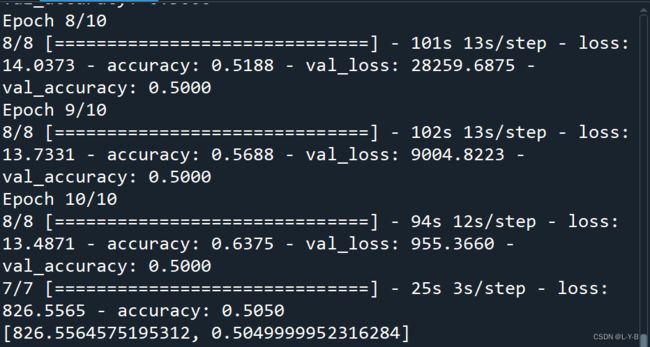
history = model.fit(train_data, train_label,
batch_size=20,
epochs=10,
validation_split=0.2, #把训练集中的五分之一作为验证集
shuffle=True)
scores = model.evaluate(test_data,test_label,verbose=1)
print(scores)
model.save('model/vgg16dogcat.h5')
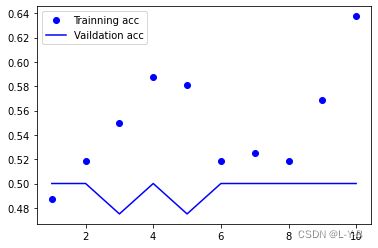
acc = history.history['accuracy'] # 获取训练集准确性数据
val_acc = history.history['val_accuracy'] # 获取验证集准确性数据
loss = history.history['loss'] # 获取训练集错误值数据
val_loss = history.history['val_loss'] # 获取验证集错误值数据
epochs = range(1, len(acc) + 1)
plt.plot(epochs, acc, 'bo', label='Trainning acc') # 以epochs为横坐标,以训练集准确性为纵坐标
plt.plot(epochs, val_acc, 'b', label='Vaildation acc') # 以epochs为横坐标,以验证集准确性为纵坐标
plt.legend() # 绘制图例,即标明图中的线段代表何种含义
plt.show()
运行结果如下:
2.PyTorch
PyTorch的一些应用
这里列举两个应用
a.模型测试
#2022-03-22
#导入相应的库
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import os
from scipy import stats
import pandas as pd
#数据的导入
titanic_data = pd.read_excel(r"C:\Users\L\data_survived.xlsx")
print(titanic_data.columns )#打印列名
#用哑变量将指定字段转成one-hot
#titanic_data = pd.concat([titanic_data,
# pd.get_dummies(titanic_data['sex']),
# pd.get_dummies(titanic_data['embarked'],prefix="embark"),
# pd.get_dummies(titanic_data['pclass'],prefix="class")], axis=1)
print(titanic_data.columns )
# print(titanic_data['sex'])
# print(titanic_data['female'])
#处理None值
titanic_data["age"] = titanic_data["age"].fillna(titanic_data["age"].mean())
titanic_data["fare"] = titanic_data["fare"].fillna(titanic_data["fare"].mean())#乘客票价
#删去无用的列
#titanic_data = titanic_data.drop(['age','sibsp','parch','fare','female','male','embark_C','embark_Q','embark_S','class_1','class_2','class_3'], axis=1)
#print(titanic_data.columns )
#titanic_data.to_excel(r"C:\Users\L\1112.xlsx")
#分离样本和标签
labels = titanic_data["survived"].to_numpy()
data_features = titanic_data.drop(['survived'], axis=1)
data = data_features.to_numpy()
labels
#样本的属性名称
feature_names = list(titanic_data.columns)
#将样本分为训练和测试两部分
from sklearn.model_selection import train_test_split
train_features,test_features,train_labels,test_labels = train_test_split(data,labels,test_size=0.3,random_state=10)
class Mish(nn.Module):#Mish激活函数
def __init__(self):
super().__init__()
print("Mish activation loaded...")
def forward(self,x):
x = x * (torch.tanh(F.softplus(x)))
return x
torch.nn.Linear(in_features,out_features,bias = True )
对传入数据应用线性变换:y = A x+ b
参数:
in_features - 每个输入样本的大小
out_features - 每个输出样本的大小
bias - 如果设置为False,则图层不会学习附加偏差。默认值:True
torch.manual_seed(0) #设置随机种子
#构建一个三层网络12-8-2
class ThreelinearModel(nn.Module):
def __init__(self):
super().__init__()
self.linear1 = nn.Linear(12, 8)
self.mish1 = Mish()
self.linear2 = nn.Linear(8, 9)
self.mish2 = Mish()
self.linear3 = nn.Linear(9, 6)
self.softmax = nn.Softmax(dim=1)
self.criterion = nn.CrossEntropyLoss() #定义交叉熵函数
def forward(self, x): #定义一个全连接网络
lin1_out = self.linear1(x)
out1 = self.mish1(lin1_out)
out2 = self.mish2(self.linear2(out1))
return self.softmax(self.linear3(out2))
def getloss(self,x,y): #实现LogicNet类的损失值计算接口
y_pred = self.forward(x)
loss = self.criterion(y_pred,y)#计算损失值得交叉熵
return loss
# 深度学习中经常看到epoch、 iteration和batchsize,下面按自己的理解说说这三个的区别:
(1)batchsize:批大小。在深度学习中,一般采用SGD训练,即每次训练在训练集中取batchsize个样本训练;
(2)iteration:1个iteration等于使用batchsize个样本训练一次;
(3)epoch:1个epoch等于使用训练集中的全部样本训练一次;
举个例子,训练集有1000个样本,batchsize=10,那么:
训练完整个样本集需要:
100次iteration,1次epoch。
net = ThreelinearModel()#模型实例化
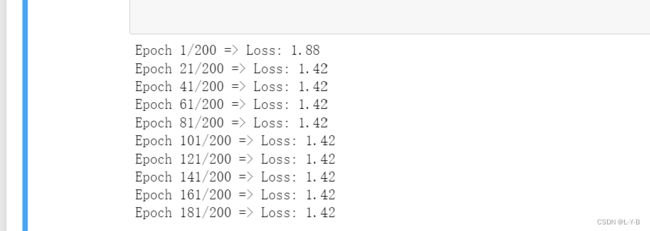
num_epochs = 200 #迭代数次
optimizer = torch.optim.Adam(net.parameters(), lr=0.04) #优化器选择Adam,只有一个参数学习率
#把特征和标签值转成torch张量形式
input_tensor = torch.from_numpy(train_features).type(torch.FloatTensor)
label_tensor = torch.from_numpy(train_labels)
losses = []#定义列表,用于接收每一步的损失值
for epoch in range(num_epochs):
loss = net.getloss(input_tensor,label_tensor)
losses.append(loss.item())
optimizer.zero_grad()#清空之前的梯度。
loss.backward()#反向传播损失值
optimizer.step()#更新参数
if epoch % 20 == 0:
print ('Epoch {}/{} => Loss: {:.2f}'.format(epoch+1, num_epochs, loss.item()))
#.item()方法 是得到一个元素张量里面的元素值
os.makedirs('models', exist_ok=True)
#os.makedirs自动创建一个文件夹models
#如果exist_ok为True,则在目标目录已存在的情况下不会触发FileExistsError异常。
torch.save(net.state_dict(), 'models/titanic_model.pht') #保存模型
print(len(losses))
import matplotlib.pyplot as plt
def moving_average(a, w=10):#定义函数计算移动平均损失值
if len(a) < w:
return a[:]
return [val if idx < w else sum(a[(idx-w):idx])/w for idx, val in enumerate(a)]
#enumerate() 函数用于将一个可遍历的数据对象(如列表、元组或字符串)组合为一个索引序列,同时列出数据和数据下标,一般用在 for 循环当中。
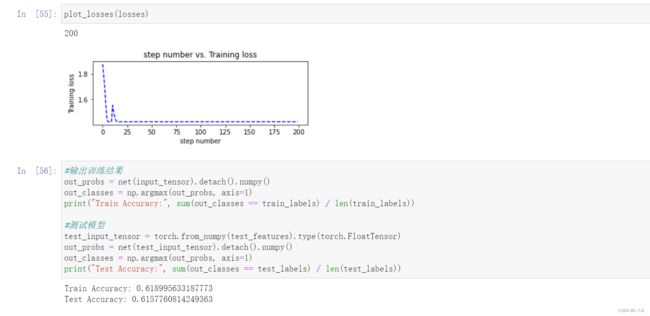
def plot_losses(losses):
avgloss= moving_average(losses) #获得损失值的移动平均值
print(len(avgloss))
plt.figure(1)
plt.subplot(211)
plt.plot(range(len(avgloss)), avgloss, 'b--')
plt.xlabel('step number')
plt.ylabel('Training loss')
plt.title('step number vs. Training loss')
plt.show()
plot_losses(losses)
#输出训练结果
out_probs = net(input_tensor).detach().numpy()
out_classes = np.argmax(out_probs, axis=1)
print("Train Accuracy:", sum(out_classes == train_labels) / len(train_labels))
#测试模型
test_input_tensor = torch.from_numpy(test_features).type(torch.FloatTensor)
out_probs = net(test_input_tensor).detach().numpy()
out_classes = np.argmax(out_probs, axis=1)
print("Test Accuracy:", sum(out_classes == test_labels) / len(test_labels))
运行结果:
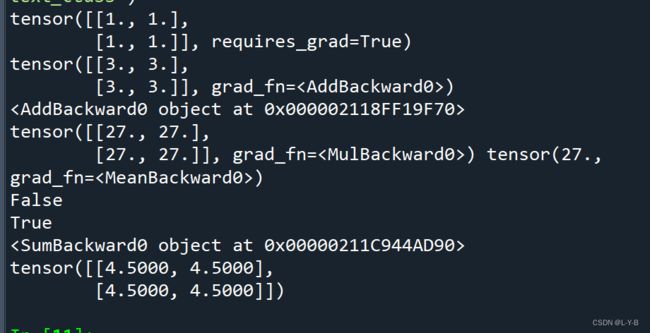
2.PyTorch自动微分
import torch
x=torch.ones(2,2,requires_grad=True)
print(x)
y=x+2
print(y)
print(y.grad_fn)
z=y*y*3
out=z.mean()
print(z,out)
a=torch.randn(2,2)
a=((a*3)/(a-1))
print(a.requires_grad)
a.requires_grad_(True)
print(a.requires_grad)
b=(a*a).sum()
print(b.grad_fn)
out.backward()
print(x.grad)
3008