文章目录
-
-
- 4.4 距离(Z)处的深度视场
- 4.5 无效深度带
- 4.6 最小测量深度
- 4.7 深度质量规范
- 4.8 深度起点(地面零点参考)
-
- 7.2 视觉处理器D4板外形
- 7.6 立体深度模块安装指南
-
- 7.6.1 螺钉安装/端部安装
- 7.6.2 支架安装/中间模块安装
- 7.6.3 立体声深度模块气隙
- 7.7 散热
- 7.9 盖板设计和材料指南
- 8 整体尺寸图
-
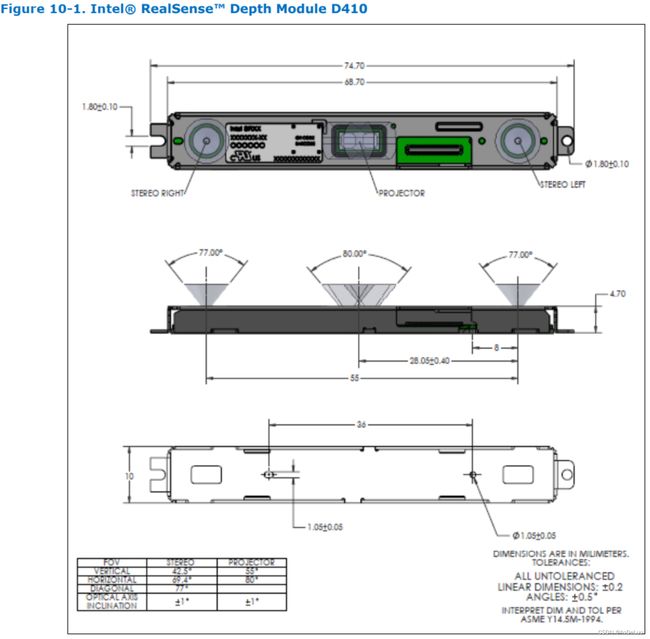
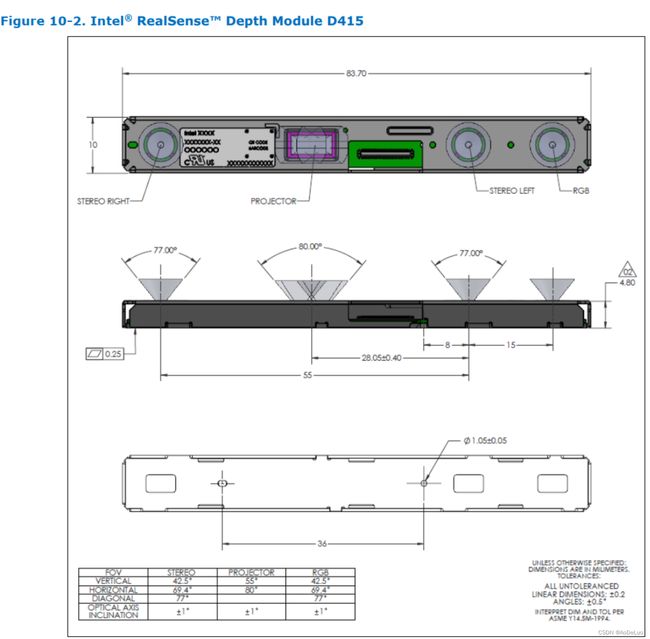
- 8.1 模组尺寸
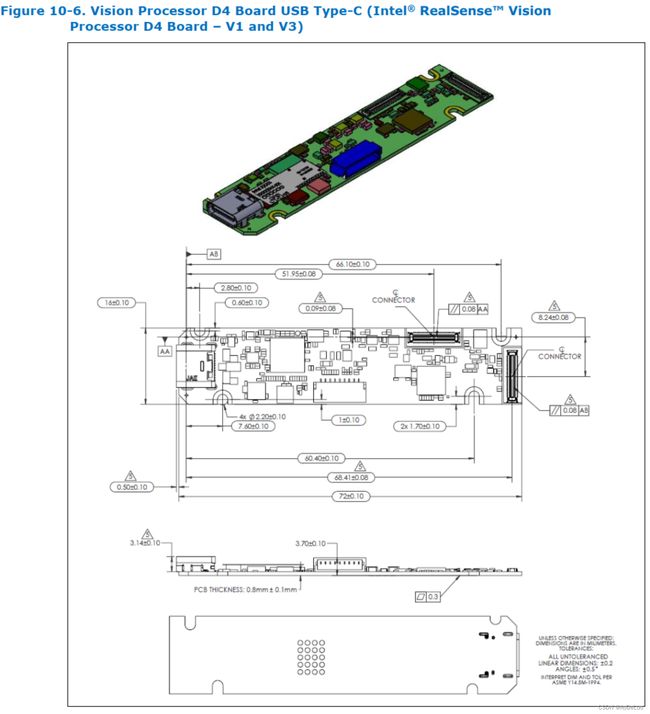
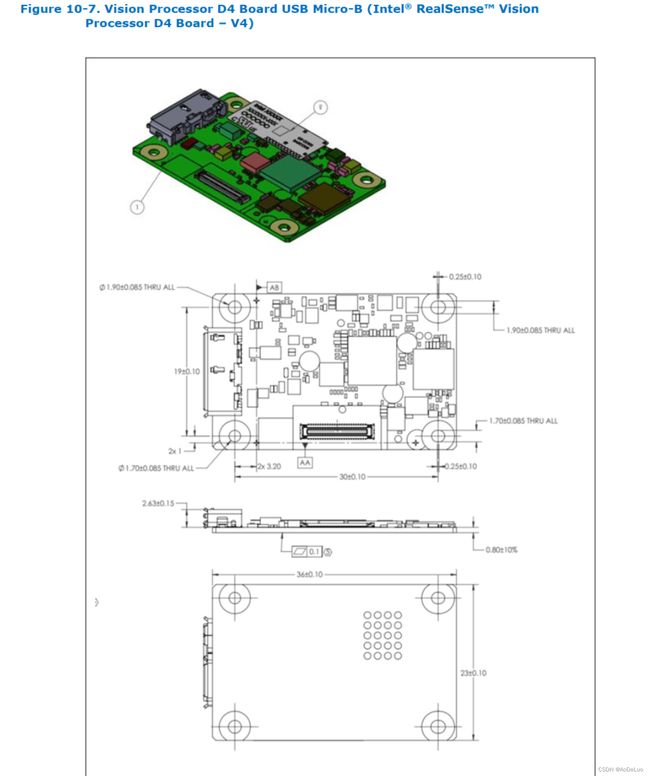
- 8.2 D4板子尺寸
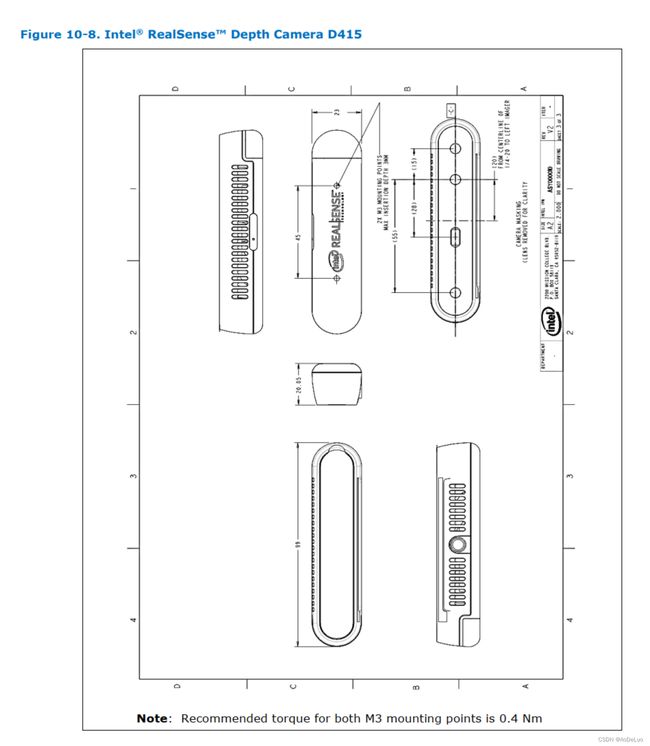
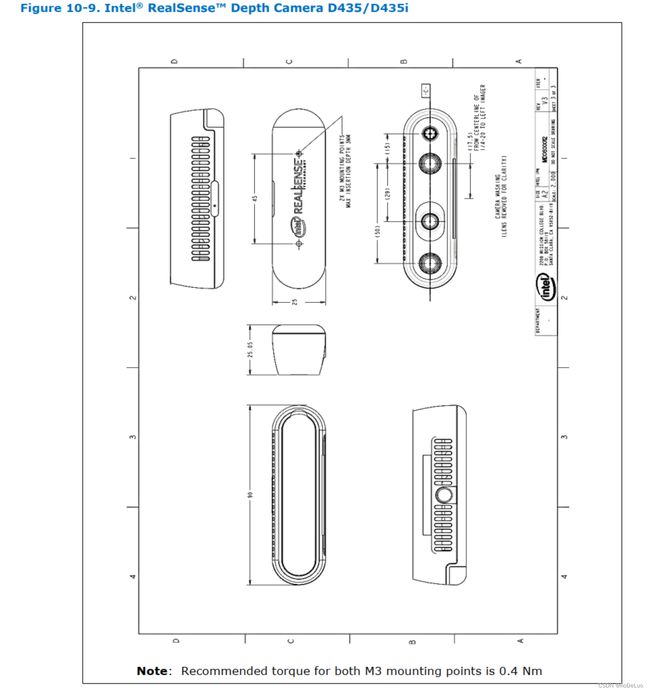
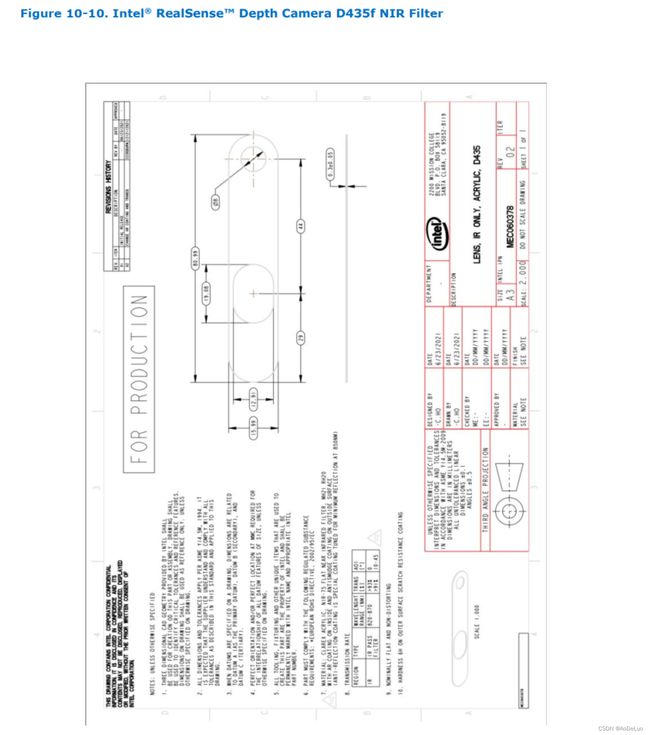
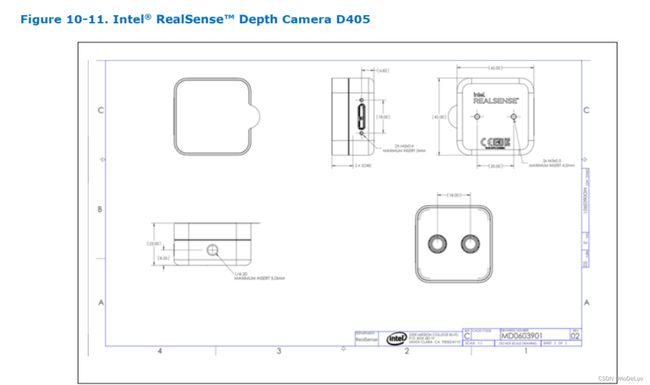
- 8.3 相机尺寸
4.4 距离(Z)处的深度视场
D e p t h F O V = H F O V 2 + tan − 1 { tan ( H F O V 2 ) − B / Z } Depth FOV =\frac{\mathrm{HFOV}}{2}+\tan ^{-1}\left\{\tan \left(\frac{\mathrm{HFOV}}{2}\right)-\mathrm{B} / \mathrm{Z}\right\} DepthFOV=2HFOV+tan−1{tan(2HFOV)−B/Z}
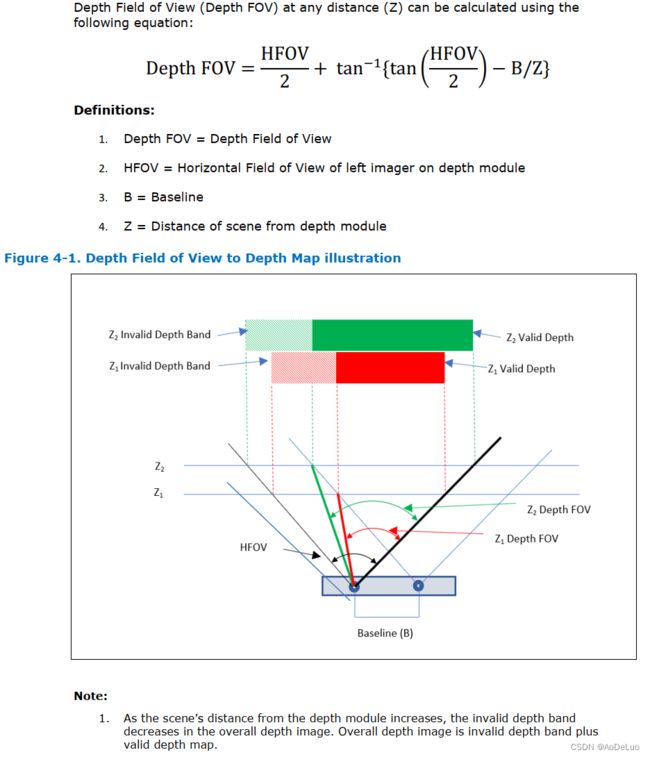 FOV原理图
FOV原理图
|
|
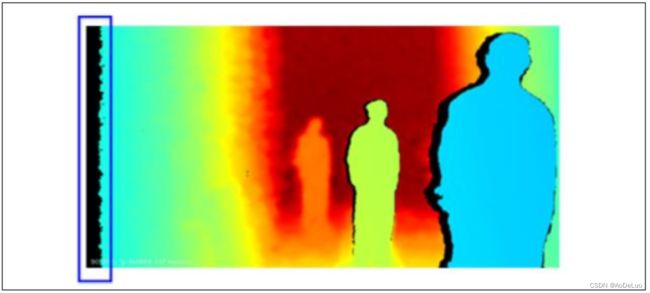
4.5 无效深度带
D4视觉处理器生成的深度数据利用左成像器作为立体匹配算法的参考,从而在相机的视场中形成非重叠区域。此非重叠区域(位于帧的左边缘)不包含深度数据。无效深度数据带随着相机/模块到场景的距离的增加而减小。
 无效深度区
无效深度区
|
|
可以使用以下公式计算无效深度带的宽度:
就水平视野而言:
D B R ( 无 效 深 度 带 与 总 水 平 图 像 的 比 率 ) = B / ( 2 ∗ Z ∗ tan ( H F O V 2 ) ) DBR(无效深度带与总水平图像的比率)=\mathrm{B} /\left(2 * \mathrm{Z} * \tan \left(\frac{\mathrm{HFOV}}{2}\right)\right) DBR(无效深度带与总水平图像的比率)=B/(2∗Z∗tan(2HFOV))
无 效 的 深 度 带 ( 以 像 素 为 单 位 ) = H R E S ∗ D B R 无效的深度带(以像素为单位)=HRES∗ DBR 无效的深度带(以像素为单位)=HRES∗DBR
就焦距而言:
D B R ( 无 效 深 度 带 与 总 水 平 图 像 的 比 率 ) = B ∗ F / ( Z ∗ H R E S ) DBR(无效深度带与总水平图像的比率)=\mathrm{B} * \mathrm{~F} /(\mathrm{Z} * \mathrm{HRES}) DBR(无效深度带与总水平图像的比率)=B∗ F/(Z∗HRES)
无 效 的 深 度 带 ( 像 素 ) = B ∗ F / Z 无效的深度带(像素)=\mathrm{B} * \mathrm{~F} / \mathrm{Z} 无效的深度带(像素)=B∗ F/Z
其中:
B = 左右相机之间的距离
Z = 场景与深度模块的距离
F = 焦距
HFOV = 深度模块上左成像仪的水平视场
HRES = 水平分辨率
请注意,以上等式对于相机设置的基本配置有效。固件中的默认相机配置可以具有针对影响无效深度带的实际宽度的深度性能而优化的设置,与根据等式计算出的无效深度带宽度相比。
4.6 最小测量深度
 不同系列相机分辨率与最小测量深度关系
不同系列相机分辨率与最小测量深度关系
|
|
4.7 深度质量规范
基于准确性、数据有效性和时间稳定性的一组标准度量用于量化深度质量。尽管模块设计用于特定深度视场,但测量在该视场(定义为感兴趣区域(ROI))的80%范围内进行。该ROI与实际使用区域和模块的合格光学参数一致。
| 度量 |
定义 |
| Depth Accuracy |
测量有效像素相对于地面真实表面的差异 |
| Fill Rate |
具有有效深度值的像素百分比 |
| Depth Standard Deviation |
测量每个有效像素相对于最佳拟合平面的总空间噪声 |
| Pixel Temporal Noise |
测量每个有效像素相对于最佳拟合平面的总时间噪声 |
 深度质量度量图解
深度质量度量图解
|
|
 深度质量规范
深度质量规范
|
|
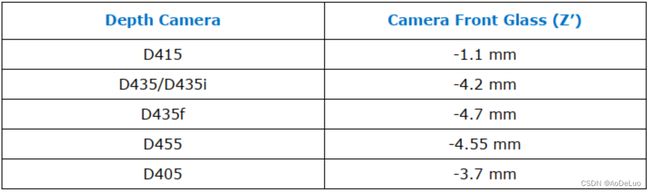
4.8 深度起点(地面零点参考)
深度起始点或地面零点参考可以被描述为深度=0的起始点或平面。对于深度模块(D410和D415),该点从镜头前面或模块背面参考。对于深度相机(D415 D435/D435i/D435f、D455),此点从相机盖玻璃的前面参考。
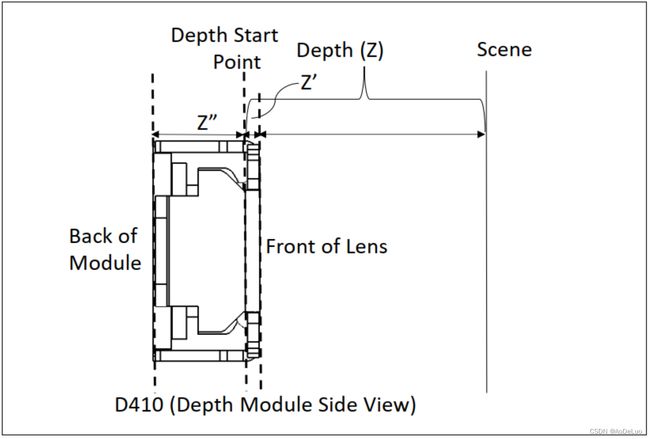 深度模块深度起点参考(D410)
深度模块深度起点参考(D410)
|
|
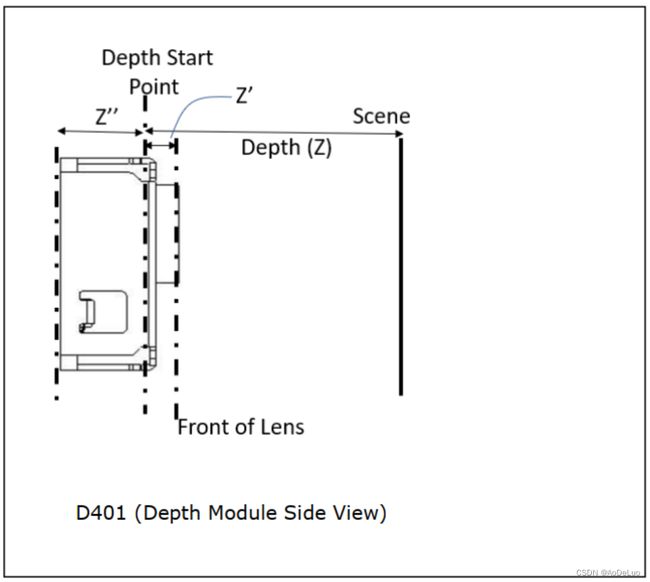 深度模块深度起点参考(D401)
深度模块深度起点参考(D401)
|
|
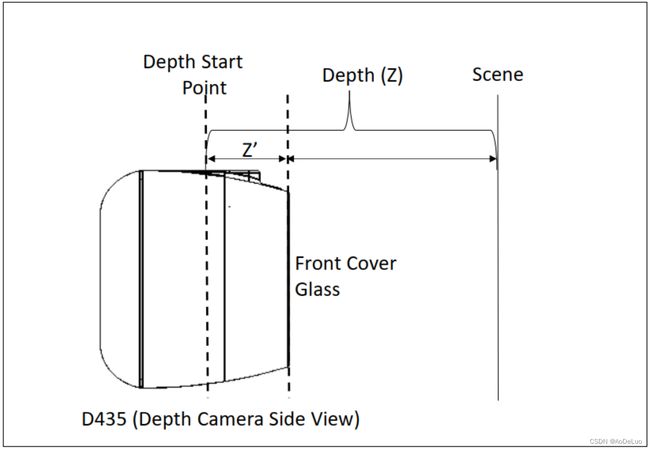 深度模块深度起点参考(D435)
深度模块深度起点参考(D435)
|
|
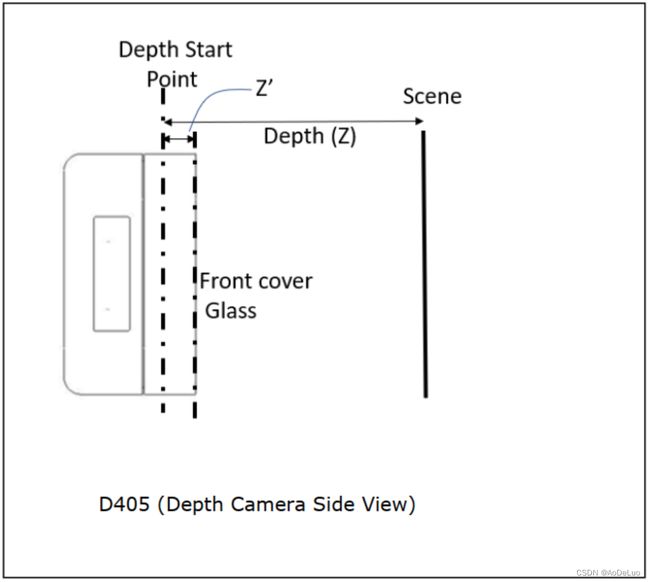 深度模块深度起点参考(D405)
深度模块深度起点参考(D405)
|
|
 深度模块深度起点
深度模块深度起点
|
|
 深度摄影机深度起点
深度摄影机深度起点
|
|
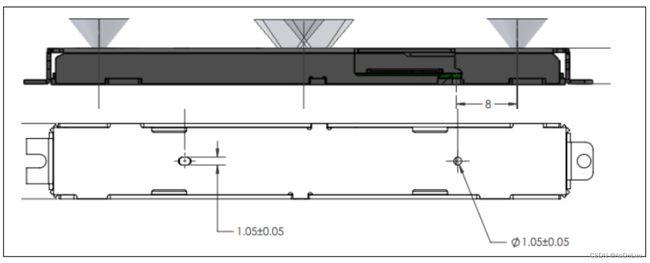
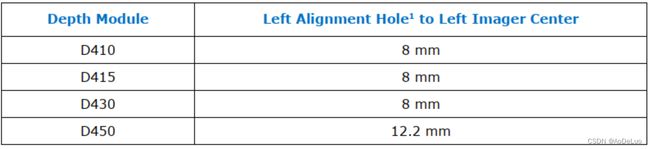
4.8.1 深度原点X-Y坐标
深度原点X-Y坐标是左成像器的X-Y中心。
 深度模块X-Y深度原点参考–D410、D415、D430、D450
深度模块X-Y深度原点参考–D410、D415、D430、D450
|
|
 深度模块X-Y深度原点坐标
深度模块X-Y深度原点坐标
|
|
 深度模块X-Y深度原点参考–D401
深度模块X-Y深度原点参考–D401
|
|
 深度模块X-Y深度原点坐标–D401
深度模块X-Y深度原点坐标–D401
|
|
 深度相机X-Y深度原点参考–D415、D435/D435i/D435f、D455
深度相机X-Y深度原点参考–D415、D435/D435i/D435f、D455
|
|
 深度相机X-Y深度原点坐标
深度相机X-Y深度原点坐标
|
|
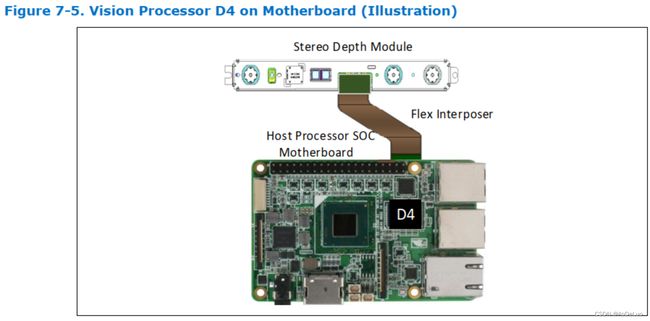
7.2 视觉处理器D4板外形
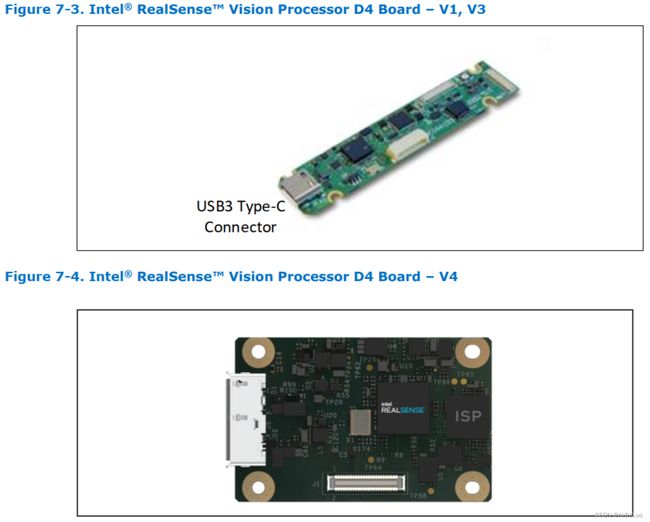 V1 V3
V1 V3
|
|
 V4
V4
|
|
 深度相机模组
深度相机模组
|
|
7.6 立体深度模块安装指南
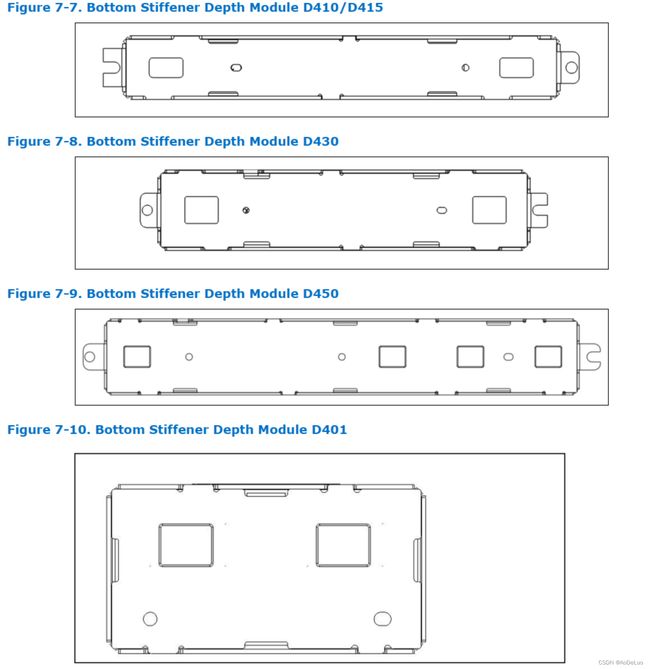
7.6.1 螺钉安装/端部安装
本节适用于以下:D410、D430和D450。立体深度模块包含一个螺钉孔和一个用于模块安装的螺钉叉。立体声深度模块应使用螺钉孔和叉上的M1.6螺钉安装在大型散热器或散热结构元件上。两个螺钉的推荐扭矩为1.6Kgf*cm。红外投影仪和立体成像仪的背面区域、相机模块和用于热传递的散热器或散热结构之间应使用热界面材料。建议使用热双面胶
 D410
D410
|
|
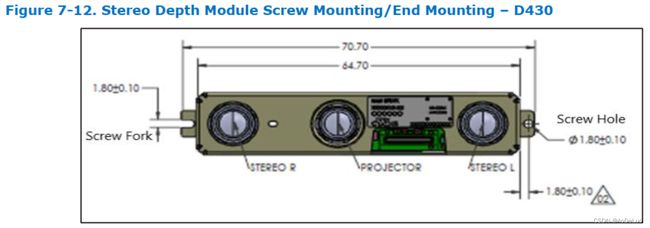 D430
D430
|
|
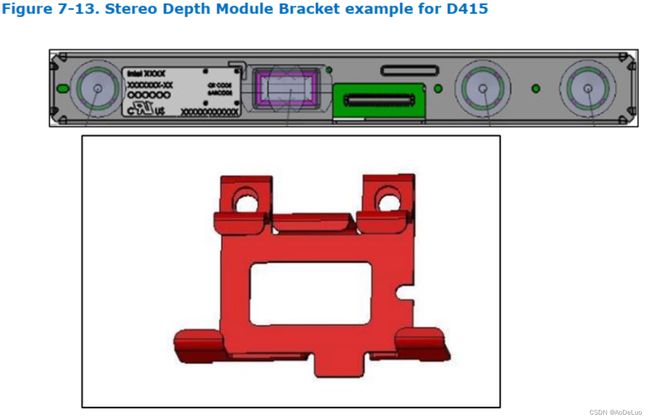
7.6.2 支架安装/中间模块安装
本节适用于所有D400 SKU,包括D415。立体深度模块应使用放置在模块中心的支架安装在大型散热器或散热结构元件上。支架使用螺钉固定到散热器或结构元件。应在红外投影仪和两个立体成像仪的背面区域、相机模块和用于热传递的散热器或散热结构之间使用热界面材料。除支架周围区域外,摄像头模块与所有侧面的间隙应至少为0.2 mm。使用安装支架时,无需在螺钉孔和螺钉叉处插入螺钉。
 D415
D415
|
|
 D415
D415
|
|
 D410
D410
|
|
7.6.3 立体声深度模块气隙
立体声深度模块上最高的组件与盖窗之间的最小气隙建议为0.3 mm
 空气缝隙
空气缝隙
|
|
7.7 散热
建议在立体深度模块和散热结构(散热器)之间插入热界面材料,特别是热膏/油脂,以改善这两个部件之间的热耦合。建议使用热导率在3-4 W/mK范围内的导热膏。必须在红外投影仪背面以及左右成像仪下方涂上一层薄薄的糊剂,以填充成像仪下方的空气间隙。
用于安装立体深度模块和ASIC板的散热器或散热结构元件的厚度应至少为2–3 mm。建议将散热器伸出立体声深度模块边缘几毫米。还建议在散热结构的背面安装散热片。在需要考虑重量的应用中,可以将高热导石墨带贴在散热器的背面。石墨带必须至少与金属散热器一样大,并尽可能延伸到金属之外,以实现最佳冷却。散热器金属必须是高导电性铝合金或铜。如果模块预计在高环境温度下运行,可能需要额外的气流以确保不超过温度限制。这些是D4相机在系统中的热集成指南。然而,建议在最终确定之前进行实际测试或系统级热建模解决方案
7.9 盖板设计和材料指南
立体声深度模块组件必须覆盖,以将灰尘和湿度降至最低。所使用的透明覆盖材料堆叠必须基于组件波长提供可接受的透射。抗反射涂层可以帮助增加覆盖材料的透射率。降低透光率的覆盖材料会导致深度性能差,并会降低相机的工作范围。应使用标称平坦、无变形和低散射的覆盖材料。
 透过率
透过率
|
|
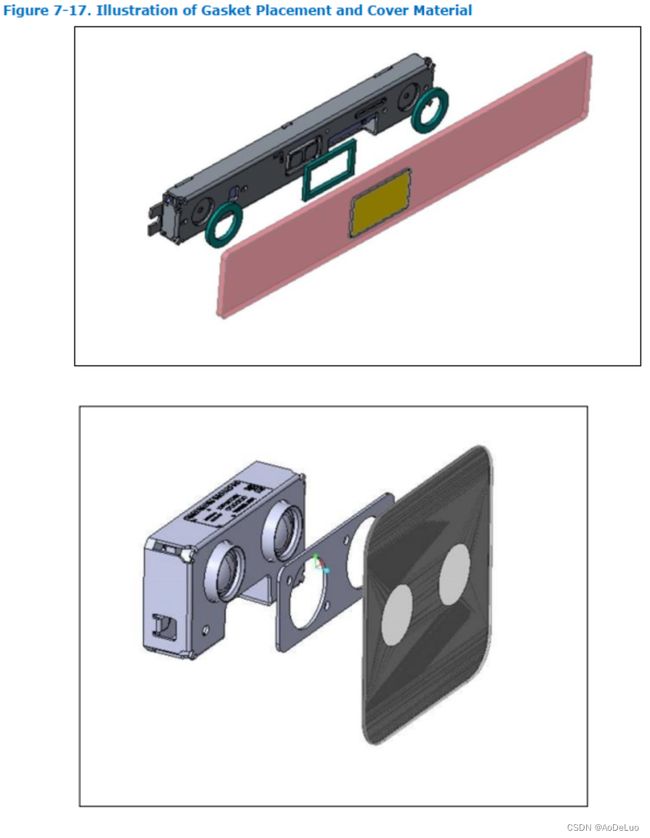
建议使用垫片进行光学隔离和防尘。然而,垫圈可能会阻碍FOV,并在模块或单个传感器透镜支架上施加不必要的应力。垫片静压力会使化妆挡板/镜头架变形,导致图像质量差,并对相机造成永久性损坏。放置在模块加强件上的垫片可能会将机箱挠曲转移到相机模块中,导致深度数据丢失。垫片厚度对施加到模块表面的静压力有很大影响。密封件越薄,施加的静压力越大。一旦垫片被压缩,静压力将呈指数增长。
 玻璃盖板安装方式
玻璃盖板安装方式
|
|
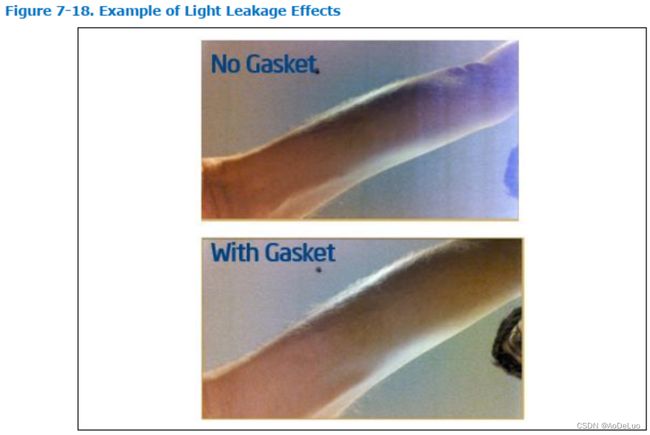
建议将左/右成像仪和红外投影仪相互隔离,以防止反射罩材料。如图7-18所示,未正确隔离摄像头可能导致漏光。漏光效果示例为防止漏光,建议在盖板孔和模块之间使用垫片材料。垫片材料需要符合要求,以使其不会向模块传递底盘挠曲力。
 玻璃面反射造成的影响
玻璃面反射造成的影响
|
|
8 整体尺寸图
8.1 模组尺寸



8.2 D4板子尺寸
8.3 相机尺寸