《人工智能》课程作业3
一. 单选题(共16题,32分)
1. (单选题, 2分)以下关于合式公式的性质错误的是()。
A. (P∧Q)∧R ≡ P∧(Q∧R)
B. P=>Q ≡ ~P→ ~Q
C. P∨Q ≡ ~P→Q
D. P=>Q ≡ ~Q → ~P
正确答案: B
2. (单选题, 2分)运用消解推理规则的前提是( )。
A. 被作用的两个公式都是合取范式
B. 被作用的两个子句中存在互补对
C. 任意两个公式都可以运用消解推理
D. 必须符合假言推理、合并、重言式、空子句(矛盾)或链式(三段论)之一
正确答案: B
3. (单选题, 2分)以下不属于宽度优先搜索方法特点的是( )。
A. 逐层进行搜索
B. 高代价搜索
C. 若有解必能找到
D. 找到的解是最优路径的解
正确答案: D
4. (单选题, 2分)如果重排OPEN表是依据 f(x)=g(x)+h(x)进行的,则称该过程为()。
A. A算法
B. A*算法
C. 有序搜索
D. 启发式搜索
正确答案: A
5. (单选题, 2分)如果问题存在最优解,则下面几种搜索算法中,( )可以认为是“智能程度相对比较高”的算法。
A. 深度优先搜索
B. 启发式搜索
C. 宽度优先搜索
D. 有界深度优先搜索
正确答案: B
6. (单选题, 2分)宽度优先搜索方法能够保证在搜索树中找到一条通向目标节点的( )途径。
A. 可行
B. 最短
C. 最长
D. 解答
正确答案: B
7. (单选题, 2分)启发式搜索中,通常OPEN表上的节点按照它们f函数值的( )顺序排列。
A. 最小
B. 平均值
C. 递增
D. 递减
正确答案: C
8. (单选题, 2分)以下不是产生式系统组成部分的是( )。
A. 匹配
B. 总数据库
C. 产生式规则
D. 控制策略
正确答案: A
9. (单选题, 2分)在基于规则的正向演绎系统中,我们把事实表示为( )。
A. IF-THEN规则
B. 子句形
C. 非蕴涵形式的与或形
D. 与或形
正确答案: C
10. (单选题, 2分)以下不属于盲目搜索特点的是( )。
A. 搜索过程中不使用与问题有关的经验信息
B. 搜索效率低
C. 需要重排open表
D. 一般只适用于求解比较简单的问题
正确答案: C
11. (单选题, 2分)以下关于合式公式的性质错误的是()。
A. ~(P∧Q) ≡ ~P∨ ~Q
B. P∧(Q∨R) ≡(P∧Q)∨(P∧R)
C. ~(P∧Q) ≡ ~P∧ ~Q
D. P∨(Q∧R) ≡ (P∨Q)∧(P∨R)
正确答案: C
12. (单选题, 2分)如果问题存在最优解,则下面几种搜索算法中,( )必然可以得到该最优解。
A. 宽度优先搜索
B. 有界深度优先搜索
C. 启发式搜索
D. 深度优先搜索
正确答案: A
13. (单选题, 2分)以下关于估价函数的说法错误的是()。
A. A算法的特征是估价函数由两部分组成
B. 不同的估价函数所体现出来的搜索效率相同
C. 启发式搜索对OPEN表按估价函数的大小排序
D. 不同的估价函数也决定了不同的启发式搜索算法
正确答案: B
14. (单选题, 2分)以下不属于盲目搜索方法的是( )。
A.宽度优先搜索
B. 有界深度优搜索
C. 等代价搜索
D. 有序搜索
正确答案: D
15. (单选题, 2分)在启发式图搜索策略中,下面描述正确的是( )。
A. closed表表用于存放所有已生成而未扩展的节点。
B. closed表用于存放已扩展过的节点。
C. open表用于存放所有已生成的节点。
D. open表用于存放已扩展过的节点。
正确答案: B
16. (单选题, 2分)以下关于减少否定的辖域范围的做法错误的是( )。
A.以 ( ∃ \exists ∃x) (~A) 代替 ( ∀ \forall ∀ x) (A)
B. 以 ( ∀ \forall ∀x) (~A) 代替 ~ ( ∃ \exists ∃x) (A)
C. 以 ~A ∧ ~B 代替 ~ (A ∨B)
D. 以 ~A ∨ ~B 代替 ~ (A∧B)
正确答案: A
二. 填空题(共7题,21分)
17. (填空题, 3分)在规则演绎系统中,其规则的______________部分是用于规定动作。
正确答案:
THEN; Then; then
18. (填空题, 3分)在消解法中,如果“” 在“”的辖域范围内,需使用________________替换。
正确答案:
Skolem函数
19. (填空题, 3分)在图搜索中,用于记录已扩展节点的是______________表。
正确答案:
CLOSED;Close;close
20. (填空题, 3分)在图搜索中,用于记录未扩展节点的是______________表。
正确答案:
(1) OPEN;open; Open
21. (填空题, 3分)在消解法中,如果“” 不在“”的辖域范围内,需使用________________替换。
正确答案:
常量
22. (填空题, 3分)在产生式系统中,____________是用来表示推理过程和行为。
正确答案:
规则
23. (填空题, 3分)原子公式由由若干_______________和______________组成。
正确答案:
(1) 谓词符号
(2) 项
三. 判断题(共17题,17分)
24. (判断题, 1分)子句是由文字的合取组成的合式公式。
A. 对
B. 错
正确答案: 错
25. (判断题, 1分)应用估价函数值重排OPEN表时,每次选择估价函数值最大的节点作为下一步考察的节点。
A. 对
B. 错
正确答案: 错
26. (判断题, 1分)CLOSED表用于记录已经扩展的点,即走过的点。
A. 对
B. 错
正确答案: 对
27. (判断题, 1分)谓词公式不可满足的充要条件是其子句集不可满足。
A. 对
B. 错
正确答案: 对
28. (判断题, 1分)从初始证据出发,按某种策略不断运用知识库中的已知知识,逐步推出结论的过程称为推理。
A. 对
B. 错
正确答案: 对
29. (判断题, 1分)在规则演绎系统中,每个If 可能与某断言集中的一个或多个断言匹配。
A. 对
B. 错
正确答案: 对
30. (判断题, 1分)空子句是可以满足的。
A. 对
B. 错
正确答案: 错
31. (判断题, 1分)对于一阶谓词逻辑,若子句集是不可满足的,则必存在一个从该子句集到空子句的归结演绎。
A. 对
B. 错
正确答案: 对
32. (判断题, 1分)OPEN表用于记录还没有扩展的点。
A. 对
B. 错
正确答案: 对
33. (判断题, 1分)在图搜索算法中,如果按估价函数作为OPEN表中的结点排序的依据,则该算法就是A*算法。
A. 对
B. 错
正确答案: 对
34. (判断题, 1分)在图搜索中,若OPEN表是空表,则失败退出。
A. 对
B. 错
正确答案: 对
35. (判断题, 1分)估价函数值越小表示位于解路径上的“希望”越小。
A. 对
B. 错
正确答案: 错
36. (判断题, 1分)任何文字的合取式称为子句。
A. 对
B. 错
正确答案: 错
37. (判断题, 1分)对于一阶谓词逻辑,如果没有归结出空子句,则说明原谓词公式是不可满足的。
A. 对
B. 错
正确答案: 错
38. (判断题, 1分)消解只能在仅含否定和析取联接词的公式(子句)间进行。
A. 对
B. 错
我的答案: 对正确答案: 对
39. (判断题, 1分)OPEN表中节点的不同顺序决定了不同的搜索策略。
A. 对
B. 错
正确答案: 对
40. (判断题, 1分)子句是由文字的析取组成的合式公式。
A. 对
B. 错
正确答案: 对
四. 其它(共7题,30分)
41. (其它, 4.8分)课后题3-12
我的答案:略
42. (其它, 4.2分)化为子句形有哪些步骤?请结合例子说明。
我的答案:
1、消去蕴涵符号
将蕴涵符号转换为∨和符号,如A∨B替换A→B。
2、减少否定符号的辖域
每个否定符号最多只用到一个谓词符号上,并反复应用狄摩根定律。如用A∨B代替(A∧B),用(∃x)(A)代替(∀x)A。
3、对变量标准化
改名哑元(受量词约束的变元),保证每个量词用唯一的哑元,即不同量词约束的变元有不同的名字。如对 (∀x)(P(x)∧(∃x)Q(x)) 标准化得 (∀x)(P(x)∧(∃y)Q(y))。
4、消去存在量词
对全程量词辖域内的存在量词,以Skolem函数代替存在量词内的约束变量。对自由的存在量词,以一个新常量替代。如 ((∀y)P(g(y),y)) 代替 (∀y)(∃x)P(x,y),其中g(y)为Skolem函数。又如 P(A) 代替 (∃x)P(x),其中A为不含变量的Skolem函数即常量。
5、化为前束形
把所有全称量词移到公式的左边,并使每个量词的辖域包括这个量词后面公式的整个部分。
前束形 = {前缀} {母式}
(全称量词串)(无量词公式)
6、把母式化为合取范式
任何母式都可写成由一些谓词公式和谓词公式的否定的析取(子句)的有限集组成的合取。
如 (A∨B)∧(A∨C) 代替 A∨(B∧C)。
7、消去全称量词
余下的量词均被全称量词量化了。同时全称量词的次序也不重要。因此,可以消去前缀,即消去明显出现的全称量词。
8、消去连词符号∧
用{A, B}代替(A∧B),消去符号∧。最后得到一个有限子句集,其中每个公式(子句)是文字的析取。
9、更换变量名称
更换变量符号,使一个变量符号只出现在一个子句中。如P(x)∨Q(x)和P(x)∨P(y),更换变量符号后为P(x1)∨Q(x1)和P(x2)∨P(y)。
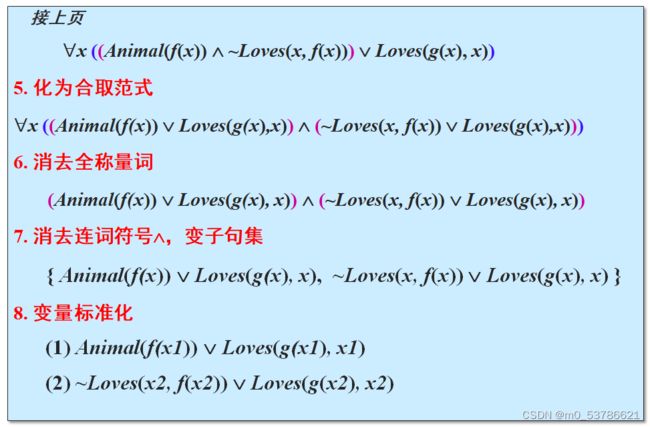
43. (其它, 4.2分)求子句集:“Everyone who loves all animals is loved by someone.”
正确答案:


44. (其它, 4.2分)
已知: (1) 能阅读者是识字的;
(2) 海豚不识字;
(3)有些海豚是聪明的;
已知谓词R(x)表示x能阅读, L(x)表示识字,D(x)表示x是海豚,I(x)表示聪明的,
请用归结原理证明:有些聪明者并不能阅读。
我的答案:
证明:
已知谓词:R(x)表示x能阅读, L(x)表示识字,D(x)表示x是海豚,I(x)表示聪明的。
则将条件与目标用谓词公式表示:
(1) ∀x(R(x)→L(x))
(2) ∀x(D(x)→¬L(x))
(3) ∃x(D(x)∧I(x))
把要求证的结论用谓词公式表示出来并否定,得:
(4) ∃x(I(x)∧¬R(x))
把上述公式化成子句集:
(1) ¬R(x)∨L(x)
(2) ¬D(y)∨¬L(y)
(3) D(a)
(4) I(a)
(5) ¬I(z)∨R(z)
应用归结原理进行归结:
(6) ¬L(a) (2),(3)归结
(7) ¬R(a) (1),(6)归结
(8) R(a) (4),(5)归结
(9) NIL (7),(8)归结
故得证
45. (其它, 4.2分)如何通过消解反演求取问题的答案?
我的答案:
反演求解:给出公式集{S}和目标公式L;
否定L,得到~L;
把~L添加到S中;
把新产生的集合{~L,S}化成子句集;
应用消解原理,推导出一个表示矛盾的空子句。
46. (其它, 4.2分)什么叫合式公式?合式公式有哪些等价关系?
我的答案:
合式公式,又称谓词公式,是一种形式语言表达式,即形式系统中按一定规则构成的表达式。
原子公式是合式公式。
给定任何公式A,否定 ¬A(“非A”) 是合式公式。
给定任何两个合式公式A和B,A∧B(“A合取B”) 是合式公式。
给定任何两个合式公式A和B,A∨B(“A析取B”) 是合式公式。
给定任何两个合式公式A和B,A→B(“A蕴涵B”) 是合式公式。
给定任何两个合式公式A和B,A↔B(“A等价于B”)是合式公式。
等价关系有:
否定之否定、蕴含与与或形式的等价
狄摩根定律
分配律
交换律
结合律
逆否律
47. (其它, 4.2分)试举例比较各种搜索方法的效率。
我的答案:
1、深度优先搜索方法分析
在此搜索中,首先扩展最新产生的(即最深的)节点。深度相等的节点可以任意排列。这种盲目(无信息)搜索叫做深度优先搜索(depth-first search)。
首先,扩展最深的节点的结果使得搜索沿着状态空间某条单一的路径从起始节点向下进行下去;只有当搜索到达一个没有后裔的状态时,它才考虑另一条替代的路径。
深度界限,为了避免考虑太长的路径(防止搜索过程沿着无益的路径扩展下去),往往给出一个节点扩展的最大深度棗深度界限。任何节点如果达到了深度界限,那么都将把它们作为没有后继节点处理。
2、等代价搜索方法分析
宽度优先搜索可被推广用来解决寻找从起始状态至目标状态的具有最小代价的路径问题,这种推广了的宽度优先搜索算法叫做等代价搜索算法。
起始节点记为S;从节点i到它的后继节点j的连接弧线代价记为c(i,j);从起始节点S到任一节点i的路径代价记为g(i)。
如果所有的连接弧线具有相等的代价,那么等代价算法就简化为宽度优先搜索算法。
3、启发式搜索方法分析
有关具体问题领域的信息常常可以用来简化搜索。一个比较灵活(但代价也较大)的利用启发信息的方法是应用某些准则来重新排列每一步OPEN表中所有节点的顺序。然后,搜索就可能沿着某个被认为是最有希望的边缘区段向外扩展。应用这种排序过程,需要某些估算节点“希望”的量度,这种量度叫做估价函数。建立估价函数的一般方法:试图确定一个处在最佳路径上的节点的概率;提出任意节点与目标集之间的距离量度或差别量度;或者在棋盘式的博弈和难题中根据棋局的某些特点来决定棋局的得分数。这些特点被认为与向目标节点前进一步的希望程度有关。
4、有序搜索方法分析
宽度优先搜索、等代价搜索和深度优先搜索统统是有序搜索技术的特例。对于宽度优先搜索,选择f(i)作为节点i的深度。对于等代价搜索,f(i)是从起始节点至节点i这段路径的代价。
有序搜索的有效性直接取决于f的选择,如果选择的f不合适,有序搜索就可能失去一个最好的解甚至全部的解。如果没有适用的准确的希望量度,那么f的选择将涉及两个方面的内容:一方面是一个时间和空间之间的折衷方案;另一方面是保证有一个最优的解或任意解。
5、图搜索方法分析:
图搜索过程的第8步对OPEN表上的节点进行排序,以便能够从中选出一个“最好”的节点作为第4步扩展用。这种排序可以是任意的即盲目的(属于盲目搜索),也可以用以后要讨论的各种启发思想或其它准则为依据(属于启发式搜索)。每当被选作扩展的节点为目标节点时,这一过程就宣告成功结束。这时,能够重现从起始节点到目标节点的这条成功路径,其办法是从目标节点按指针向S返回追溯。当搜索树不再剩有未被扩展的端节点时,过程就以失败告终(某些节点最终可能没有后继节点,所以OPEN表可能最后变成空表)。在失败终止的情况下,从起始节点出发,一定达不到目标节点。
6、宽度优先搜索方法分析:
宽度优先搜索是图搜索一般过程的特殊情况,将图搜索一般过程中的第8步具体化为本算法中的第6步,这实际是将OPEN表作为“先进先出”的队列进行操作。
宽度优先搜索方法能够保证在搜索树中找到一条通向目标节点的最短途径;这棵搜索树提供了所有存在的路径(如果没有路径存在,那么对有限图来说,我们就说该法失败退出;对于无限图来说,则永远不会终止)。