天气识别-第三周
- 本文为365天深度学习训练营 中的学习记录博客
- 参考文章:Pytorch实战 | 第P3周:彩色图片识别:天气识别
- 原作者:K同学啊|接辅导、项目定制
难度:新手入门⭐
语言:Python3、Pytorch
要求:√
本地读取并加载数据。
测试集accuracy到达93%
拔高:√
测试集accuracy到达95%
调用模型识别一张本地图片
我的环境:
语言环境:Python 3.6.13
编译器:Pycharm 2020.2
深度学习环境:Pytorch 1.10.0
显卡及显存: RTX 3060(服务器)
文章目录
- 一、 前期准备
-
- 1. 设置GPU
- 2. 导入数据
- 3. 划分数据集
- 二、构建CNN网络
- 三、 训练模型
- 1. 设置超参数
- 2.训练循环
-
- 3. 编写测试函数
- 4. 正式训练
- 总结
一、 前期准备
1. 设置GPU
如果设备上支持GPU就使用GPU,否则使用CPU
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
2. 导入数据
import os,PIL,random,pathlib
data_dir = './data/weather_photos/'
data_dir = pathlib.Path(data_dir)
data_paths = list(data_dir.glob('*'))
classeNames = [str(path).split("\\")[1] for path in data_paths]
classeNames
['cloudy', 'rain', 'shine', 'sunrise']
total_datadir = './data/'

train_transforms = transforms.Compose([
transforms.Resize([224, 224]), # 将输入图片resize成统一尺寸
transforms.ToTensor(), # 将PIL Image或numpy.ndarray转换为tensor,并归一化到[0,1]之间
transforms.Normalize( # 标准化处理-->转换为标准正太分布(高斯分布),使模型更容易收敛
mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225]) # 其中 mean=[0.485,0.456,0.406]与std=[0.229,0.224,0.225] 从数据集中随机抽样计算得到的。
])
total_data = datasets.ImageFolder(total_datadir,transform=train_transforms)
total_data
3. 划分数据集
train_size = int(0.8 * len(total_data))
test_size = len(total_data) - train_size
train_dataset, test_dataset = torch.utils.data.random_split(total_data, [train_size, test_size])
```python
batch_size = 32
train_dl = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=1)
test_dl = torch.utils.data.DataLoader(test_dataset,
batch_size=batch_size,
shuffle=True,
num_workers=1)
for X, y in test_dl:
print("Shape of X [N, C, H, W]: ", X.shape)
print("Shape of y: ", y.shape, y.dtype)
break

二、构建CNN网络
import torch.nn.functional as F
class Network_bn(nn.Module):
def __init__(self):
super(Network_bn, self).__init__()
"""
nn.Conv2d()函数:
第一个参数(in_channels)是输入的channel数量
第二个参数(out_channels)是输出的channel数量
第三个参数(kernel_size)是卷积核大小
第四个参数(stride)是步长,默认为1
第五个参数(padding)是填充大小,默认为0
"""
self.conv1 = nn.Conv2d(in_channels=3, out_channels=12, kernel_size=5, stride=1, padding=0)
self.bn1 = nn.BatchNorm2d(12)
self.conv2 = nn.Conv2d(in_channels=12, out_channels=12, kernel_size=5, stride=1, padding=0)
self.bn2 = nn.BatchNorm2d(12)
self.pool = nn.MaxPool2d(2,2)
self.conv4 = nn.Conv2d(in_channels=12, out_channels=24, kernel_size=5, stride=1, padding=0)
self.bn4 = nn.BatchNorm2d(24)
self.conv5 = nn.Conv2d(in_channels=24, out_channels=24, kernel_size=5, stride=1, padding=0)
self.bn5 = nn.BatchNorm2d(24)
self.conv6 = nn.Conv2d(in_channels=24, out_channels=48, kernel_size=5, stride=1, padding=0)
self.bn6 = nn.BatchNorm2d(48)
self.conv7 = nn.Conv2d(in_channels=48, out_channels=48, kernel_size=5, stride=1, padding=0)
self.bn7 = nn.BatchNorm2d(48)
self.fc1 = nn.Linear(48*21*21, len(classeNames))
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = self.pool(x)
x = F.relu(self.bn4(self.conv4(x)))
x = F.relu(self.bn5(self.conv5(x)))
x = self.pool(x) #24*50*50
x = F.relu(self.bn6(self.conv6(x))) #48*46*46
x = F.relu(self.bn7(self.conv7(x))) #48*42*42
x = self.pool(x) #48*21*21
x = x.view(-1, 48*21*21)
x = self.fc1(x)
return x
device = "cuda" if torch.cuda.is_available() else "cpu"
print("Using {} device".format(device))
`
device = "cuda" if torch.cuda.is_available() else "cpu"
print("Using {} device".format(device))
model = Network_bn().to(device)
model
三、 训练模型
1. 设置超参数
loss_fn = nn.CrossEntropyLoss() # 创建损失函数
learn_rate = 1e-4 # 学习率
opt = torch.optim.SGD(model.parameters(),lr=learn_rate)
2.训练循环
def train(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset) # 训练集的大小,一共60000张图片
num_batches = len(dataloader) # 批次数目,1875(60000/32)
train_loss, train_acc = 0, 0 # 初始化训练损失和正确率
for X, y in dataloader: # 获取图片及其标签
X, y = X.to(device), y.to(device)
# 计算预测误差
pred = model(X) # 网络输出
loss = loss_fn(pred, y) # 计算网络输出和真实值之间的差距,targets为真实值,计算二者差值即为损失
# 反向传播
optimizer.zero_grad() # grad属性归零
loss.backward() # 反向传播
optimizer.step() # 每一步自动更新
# 记录acc与loss
train_acc += (pred.argmax(1) == y).type(torch.float).sum().item()
train_loss += loss.item()
train_acc /= size
train_loss /= num_batches
return train_acc, train_loss
3. 编写测试函数
def test (dataloader, model, loss_fn):
size = len(dataloader.dataset) # 测试集的大小,一共10000张图片
num_batches = len(dataloader) # 批次数目,313(10000/32=312.5,向上取整)
test_loss, test_acc = 0, 0
# 当不进行训练时,停止梯度更新,节省计算内存消耗
with torch.no_grad():
for imgs, target in dataloader:
imgs, target = imgs.to(device), target.to(device)
# 计算loss
target_pred = model(imgs)
loss = loss_fn(target_pred, target)
test_loss += loss.item()
test_acc += (target_pred.argmax(1) == target).type(torch.float).sum().item()
test_acc /= size
test_loss /= num_batches
return test_acc, test_loss
4. 正式训练
epochs = 20
train_loss = []
train_acc = []
test_loss = []
test_acc = []
for epoch in range(epochs):
model.train()
epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, opt)
model.eval()
epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn)
train_acc.append(epoch_train_acc)
train_loss.append(epoch_train_loss)
test_acc.append(epoch_test_acc)
test_loss.append(epoch_test_loss)
template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}%,Test_loss:{:.3f}')
print(template.format(epoch+1, epoch_train_acc*100, epoch_train_loss, epoch_test_acc*100, epoch_test_loss))
print('Done')
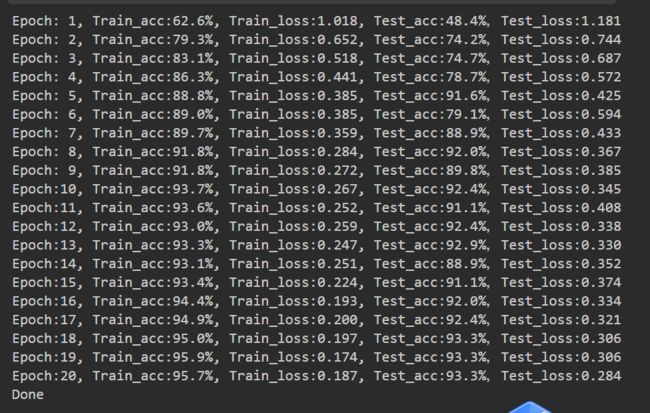
我们可以看到,20epoch时测试集准确率已经达到93.3%,已基本满足需求.为了继续提升模型准确率,
原有模型加入(卷积层-BN层-卷积层-BN层)
class Network_bn(nn.Module):
def __init__(self):
super(Network_bn, self).__init__()
......
self.conv6 = nn.Conv2d(in_channels=24, out_channels=48, kernel_size=5, stride=1, padding=0)
self.bn6 = nn.BatchNorm2d(48)
self.conv7 = nn.Conv2d(in_channels=48, out_channels=48, kernel_size=5, stride=1, padding=0)
self.bn7 = nn.BatchNorm2d(48)
self.fc1 = nn.Linear(48*21*21, len(classeNames))
def forward(self, x):
........
x = F.relu(self.bn6(self.conv6(x))) #48*46*46
x = F.relu(self.bn7(self.conv7(x))) #48*42*42
x = self.pool(x) #48*21*21
x = x.view(-1, 48*21*21)
并将优化器改为Adam
opt = torch.optim.Adam(model.parameters(),lr=learn_rate)
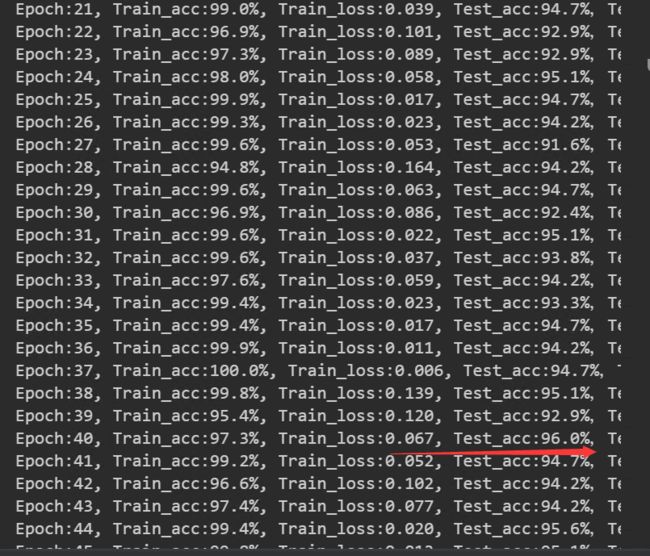
并调整训练次数为100,训练结果如下图:
可视化结果:
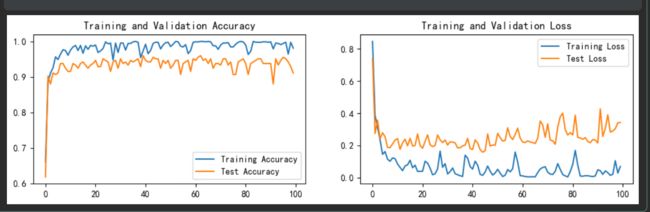
模型在40epoch时测试集准确率已达到95.0%,并在此处上下波动。
调用本地图片测试:
首先保存模型
torch.save(model.state_dict(),"./net_19.pth")
model = torch.load("./net_19.pth")
print(model)
##载入模型并读取权重
##载入模型并读取权重
model = Network_bn()
model.load_state_dict(torch.load("./net_19.pth"))
model.to(device)
model.eval()
img_path = './data/cloudy_08099.jpg' #本地图片路径

输出概率最大的类别
_, indices = torch.max(outputs, 1)
percentage = torch.nn.functional.softmax(outputs, dim=1)[0] * 100
perc = percentage[int(indices)].item()
result = class_names[indices]
print('predicted:', result)
识别结果

总结
1.学习torchvision.transforms.Compose()类。这个类的主要作用是串联多个图片变换的操作。也学习了Batch Normalization,它通过引入层内的批归一化操作对特征进行归一化,减少ICS(Internal Covariate Shift),实现了加速网络收敛的效果。
2.20epoch时模型准确率已经达到93.3%,满足基本要求。模型改进后在40epoch时模型准确率达到95.0%。
3.保存模型,载入模型并读取权重后,即可识别本地图片。
参考资料
pytorch模型推理单张图片读取方式