StableDiffusion模型在PCIE上的迁移与精度对齐
StableDiffusion模型在PCIE上的迁移与精度对齐
- 简介
- 模型介绍
2.1 Diffusion 过程解析 - 模型细节
- 迁移细节:绕过不适配算子
4.1 获得原始模型
4.2 迁移CLIP中TextEncoder模型
4.3 迁移VAE模型
4.4 迁移Conditional U-Net模型 :绕过不适配算子 dictconstruct, boardcast_to, eisum 算子 - pipeline 搭建与精度对齐
5.1 精度对齐
5.2 问题分析 - 参考资料
1. 简介
StableDiffusion 模型是一种基于 Diffusion 模型的图像生成模型,其在图像生成质量上有着显著的提升。本文将介绍如何将 StableDiffusion 模型迁移到 BM1684 中,并对其精度进行对齐。
2. 模型介绍
StableDiffusion 是一种潜在的文本到图像扩散模型,能够在给定任何文本输入的情况下生成照片般逼真的图像。
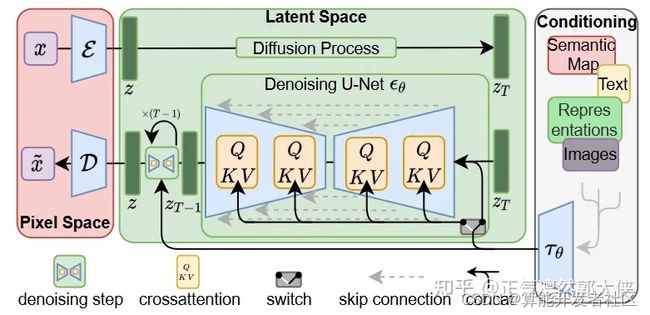
StableDiffusion 由三个部分组成:一个是 Diffusion 模型,一个是一个基于 Transformer 的文本编码器,最后是一个VAE,图像生成器。Diffusion 模型是一个基于扩散过程的生成模型,它能够生成高质量的latent。Transformer 是一种基于注意力机制的编码器,它能够将文本编码为一个向量。Transformer 与 Diffusion 模型的结合,使得 StableDiffusion 能够在给定任何文本输入的情况下生成照片般逼真的图像。
2.1 Diffusion 过程解析
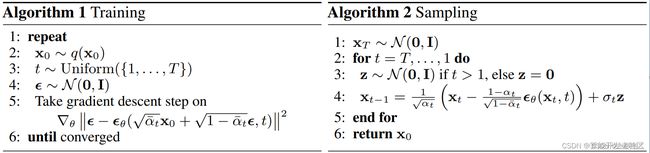
Diffusion 过程是一个逐渐从noise中生成有意义信息的过程,其过程如下图所示:

训练时会从 X0 逐渐扩散到XT, 其中XT是随机噪声,X0是真实图像。在推理时,模型会从噪声中生成图像。
- 扩散过程(X0 −> XT):逐步对图像加噪声,这一逐步过程可以认为是参数化的马尔可夫过程。
- 逆扩散过程(X0 <- XT):从噪声中反向推导,逐渐消除噪声以逆转生成图像。
训练完成后,就能通过随机采样高斯噪声来生成图像了。实际上扩散模型和AE、VAE很类似,一个粗略的发展过程可以认为是AE–VAE–VQVAE–Diffusion,而扩散模型也逐步从DDPM–GLIDE–DALLE2–Stable Diffusion。
扩散模型可以看成层次式VAE,这或许证明了即使Encoder微小、隐空间维度固定、马尔科夫跃迁,当推广到无限层时,模型仍然能够学习到强大能力。
3. 模型细节
它由VAE,Unet, CLIP 文本编码器组成。
- VAE。在训练期间,VAE编码器用于获取图像的潜在表示(latents)以进行前向扩散过程,即加噪声。而在推理过程中,逆扩散的去噪过程使用VAE解码器生成图像。
- U-Net。编码解码都由ResNet组成。编码器得到图像表示,而解码器还原图像,且此时得到的应该是噪声较小的。更具体地说, U-Net 输出预测可用于计算预测去噪图像表示的噪声残差。此外,交叉注意力层被添加到 U-Net 的编码器和解码器部分(ResNet 块之间)以调节输出。
- CLIP。文本编码将文本转换为 U-Net输入。且和Imagen一样,Stable Diffusion在训练期间不训练文本编码器,而只是使用 CLIP 已经训练好的CLIPTextModel。
4. 迁移细节:绕过不适配算子
4.2获得原始模型
使用作者提供的预训练模型。
安装必要的库 pip install diffusers==0.2.4 transformers scipy ftfy
from diffusers import StableDiffusionPipeline
# get your token at https://huggingface.co/settings/tokens
pipe = StableDiffusionPipeline.from_pretrained("CompVis/stable-diffusion-v1-4", use_auth_token=YOUR_TOKEN)
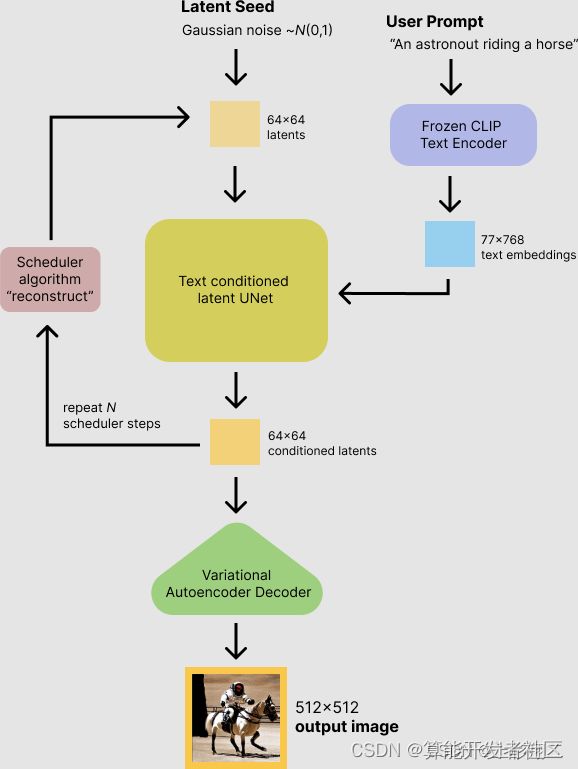
prompt = "a photograph of an astronaut riding a horse" #输入文本
image = pipe(prompt)["sample"][0] #得到生成的图片
由此可以从huggingface下载预训练模型
原始仓库提供了多个版本

下载的模型会在.cache里面
4.2 迁移CLIP中TextEncoder模型
直接迁移 CLIP 中的 TextEncoder 模型,所提供的ONNX版本是可以的。
需要注意的是: TextEncoder 模型的输入是一个文本token序列,token是从0开始的整数,对应在设置模型的描述时添加数据类型的声明。
转换脚本是:
python3 -m bmneto --model=./text_encoder.onnx \
--outdir="./" \
--target="BM1684" \
--shapes="1,77" \
--opt=1 \
--cmp=false \
--net_name="text_encoder" \
--descs="[0,int64,0,49409]"
如果不设置cmp=false,则会报错.
4.3 迁移VAE模型
VAE decoder onnx 无法使用bmneto转换, 因此本次采用的是 PyTorch 的方式:
import torch
from diffusers import StableDiffusionPipeline
pipe = StableDiffusionPipeline.from_pretrained("/mnt/sdb/wangyang.zuo/.cache/huggingface/diffusers/CompVis--stable-diffusion-v1-4.main.7c3034b58f838791fc1c581d435c452ea80af274")
def fn(input_tensor): # 构造输入函数
with torch.no_grad():
return pipe.vae.decode(input_tensor)
jitmodel = torch.jit.trace(fn, torch.rand(1,4,64,64))
jitmodel.save("vae_decoder.pt")
转换命令
python3 -m bmnetp --model=./vae_decoder.pt \
--outdir="./" \
--target="BM1684" \
--shapes="1,4,64,64" \
--net_name="vae_decoder" \
--opt=2 \
--cmp=false
4.4 迁移Conditional U-Net模型 :绕过不适配算子 dictconstruct, boardcast_to, eisum 算子
这个模型较大,得到的jit模型有3.4G,首先需要注意的是,模型是多输入,其输入顺序如源码所示:
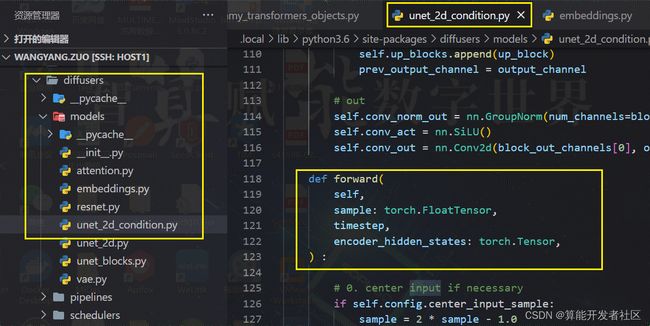
通过构造输入,得到jit模型, 其中各个输入信息如下:
timestep 1
latent_model_input.shape
(2, 4, 64, 64)
text_embeddings.shape
(2, 77, 768)
通过调试可以知道timestep的初始值为999, 因此timestep 为 torch.tensor(999).
转换脚本为:
import bmnetp
## compile fp32 model
bmnetp.compile(
model = "./unet/unet_jit_remove_pickle_error.pt", ## Necessary
outdir = "./compilation5", ## Necessary
target = "BM1684", ## Necessary
shapes = [[2,4,64,64], [2], [2,77,768]], ## Necessary
net_name = "unet2", ## Necessary
opt = 0, ## optional, if not set, default equal to 1
dyn = False, ## optional, if not set, default equal to False
cmp = False, ## optional, if not set, default equal to True
enable_profile = False, ## optional, if not set, default equal to False
)
提示报错为:
![]()
- 修改DictConstruct
然后后续执行jit时有诸多问题:非torch类型的数据无法trace, 存在输出为dict。
通过源码可以看到,Conditional U-Net模型的输出是一个dict,我们将其修改为输出tensor,然后再进行trace。

- 修改不适配
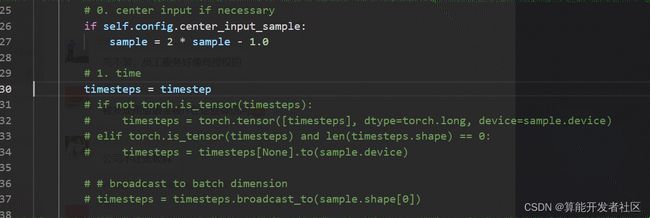
aten::boardcast to
查看源码可以看到,

继续查看源码,发现只有这一处出现了boardcast_to算子, 而且是在网络前半部分出现的,只于timestamp有关,其作用时将timestemp的维度改为输入的batch维度. 因此,此算子可以抽离出来,将其转化为预处理, 因此修改源码为:
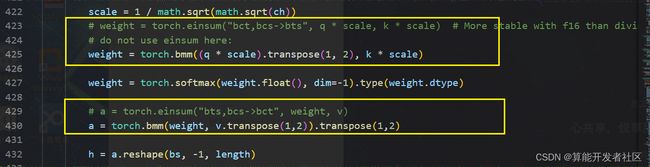
这两个修改后,可以得到jit模型,但是在转换时仍会报错,eisum求和错误。

这是因为我们的SDK,对于部分eisum算子不支持。
考虑到eisum是运算节点,而非数据存储节点,因此可以将其转化为其他算子,比如bmm和transpose等,此操作不影响模型加载预训练文件。 需要注意的是,如果是带有数据的节点,如conv算子,则进行更改可能会影响预训练模型的加载,因此需要谨慎操作。
修改源码如下:
然后重新加载模型,可以得到jit模型,进行转换。
此时仍然会报错:ASSERT info: alloc 1073741824 failed

需要设置环境变量 export CMODEL_GLOBAL_MEM_SIZE=8589934592
到此我们可以成功将3个模型转为bmodel模型,完成模型转换工作。
5. pipeline 搭建与精度对齐
pipeline 搭建参考 stable_diffusion.openvino ,其模型为单独文件engine.py , 使用这个仓库,我们只需要替换engine.py , 然后简单修改其他文件即可.
修改后的engine.py 为:
import sophon.sail as sail
import numpy as np
class EngineOV:
def __init__(self, model_path="",device_id=0) :
self.model = sail.Engine(model_path, device_id, sail.IOMode.SYSIO)
self.graph_name = self.model.get_graph_names()[0]
self.input_name = self.model.get_input_names(self.graph_name)[0]
self.input_shape= self.model.get_input_shape(self.graph_name, self.input_name)
self.output_name= self.model.get_output_names(self.graph_name)[0]
self.output_shape= self.model.get_output_shape(self.graph_name, self.output_name)
print("input_name={}, input_shape={}, output_name={}, output_shape={}".format(self.input_name,self.input_shape,self.output_name,self.output_shape))
def __str__(self):
return "EngineOV: model_path={}, device_id={}".format(self.model_path,self.device_id)
def __call__(self, args):
output = self.model.process(self.graph_name, args)
return output[self.output_name]
并在pipeline加载时修改 __init__函数:
# text features
self.text_encoder = EngineOV("./text_encoder/text_encoder.bmodel")
# diffusion
self.unet = EngineOV("./unet/compilation.bmodel",device_id=1)
self.latent_shape = (4,64,64 )
# decoder
self.vae_decoder = EngineOV("./vae_decoder/vae_decoder.bmodel")
因为我们对conditional unet 做了更改,因此需要修改输入,设置为预处理。代码如下所示:
batch_size = latent_model_input.shape[0]
newt = np.tile(t, (batch_size))
noise_pred = self.unet({
"input.1": latent_model_input,
"timesteps.1": newt,
"input0.1": text_embeddings
})
5.1 精度对齐
最开始发现我们的pipeline结果是:
与原始的结果不一致。
为此,我们需要对比每个模型的输出。为了方便,1. 只修改model文件,不修改pipeline文件,然后对比pipeline的输出;2. 我们将每个模型的输入输出保存到文件中,然后进行对比。 对比的方法是计算输出的L1距离和cos相似度。
另外因为 diffusion 模型的输入是随机的,因此我们需要固定输入,然后对比输出。
# text encoder informtion record
tokens = torch.tensor(tokens).unsqueeze(0)
np.save("tokens.npy", tokens.numpy())
# text_embedding use npu engine to inference
text_embeddings = self.text_encoder(tokens)[0].detach().cpu().numpy()
np.save('text_embeddings.npy', text_embeddings)
# text_encoder onnx output shape is (1, 77, 768)
# do classifier free guidance
if guidance_scale > 1.0:
tokens_uncond = self.tokenizer(
"",
padding="max_length",
max_length=self.tokenizer.model_max_length,
truncation=True
).input_ids
np.save("tokens_uncond.npy", tokens_uncond)
uncond_embeddings = self.text_encoder(torch.tensor(tokens_uncond).unsqueeze(0))
uncond_embeddings = uncond_embeddings[0].detach().numpy()
np.save("uncond_embeddings.npy", uncond_embeddings)
text_embeddings = np.concatenate((uncond_embeddings, text_embeddings), axis=0)
# conditional unet information record
latent_model_input = np.load("./bins/latent_model_input-{}.npy".format(i))
newt = np.load("./bins/newt-{}.npy".format(i))
text_embeddings = np.load("./bins/text_embeddings-{}.npy".format(i))
noise_pred = self.unet({
"input.1": latent_model_input,
"timesteps.1": newt,
"input0.1": text_embeddings
})
np.save("./predict/noise_pred-{}.npy".format(i), noise_pred)
# vae decoder information record
np.save('latents.npy', latents)
image = self.model.model.vae.decode(torch.tensor(latents,dtype=torch.float32).unsqueeze(0)).detach().cpu().numpy()
np.save("image.npy", image)
通过对比,我们发现:
- text encoder 模型,在输入一致时,输出相似度为99.9999%, l1距离为1e-7;
- conditional unet 模型,在输入一致时,输出相似度为99.7%, l1距离为0.01;
- vae decoder 模型,在输入一致时,输出相似度为99.9999%, l1距离为1e-7;
粗看并没有太大的差异,但是conditional unet会循环32次,因此我们跟踪每次的conditional unet的输入输出,对比发现:
循环损失下,l1距离和cos都很差。
5.2 问题分析
单次的输入是一致时, conditional unet 的差异只是0.01,所以模型的问题应该并不大 ,需要避免循环损失。 进一步查看源代码发现: conditional unet 的输入中timestamp,会走embedding,这说明timestamp应该是整数,而不是浮点数。 而我们转模型时,timestamp的输入是浮点数,因此我们需要修改timestamp的输入为整数。
修改转模型命令为:
import bmnetp
## compile fp32 model
bmnetp.compile(
model = "./unet/unet_jit_remove_pickle_error.pt", ## Necessary
outdir = "./compilation5", ## Necessary
target = "BM1684X", ## Necessary
shapes = [[2,4,64,64], [2], [2,77,768]], ## Necessary
net_name = "unet2", ## Necessary
opt = 0,
dyn = False,
cmp = False, ## optional, if not set, default equal to True
enable_profile = False, ## optional, if not set, default equal to False
desc="[1,int64,0,10000000]", # 额外添加的参数
)
并修改预处理为:
batch_size = latent_model_input.shape[0]
newt = np.tile(t, (batch_size)).astype(np.int64)
noise_pred = self.unet({
"input.1": latent_model_input,
"timesteps.1": newt,
"input0.1": text_embeddings
})
完成后,重新转模型,重新部署,重新测试,发现精度对齐。
参考资料
[1] High-Resolution Image Synthesis With Latent Diffusion Models
@InProceedings{Rombach_2022_CVPR,
author = {Rombach, Robin and Blattmann, Andreas and Lorenz, Dominik and Esser, Patrick and Ommer, Bj\"orn},
title = {High-Resolution Image Synthesis With Latent Diffusion Models},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2022},
pages = {10684-10695}
}
[2] https://blog.csdn.net/qq_39388410/article/details/126576756