OpenCV4经典案例实战教程 笔记
OpenCV4经典案例实战教程 笔记
这几天在看OpenCV4经典的案例实战教程,这里记录一下学习的过程。
案例一 刀片1的缺陷检测
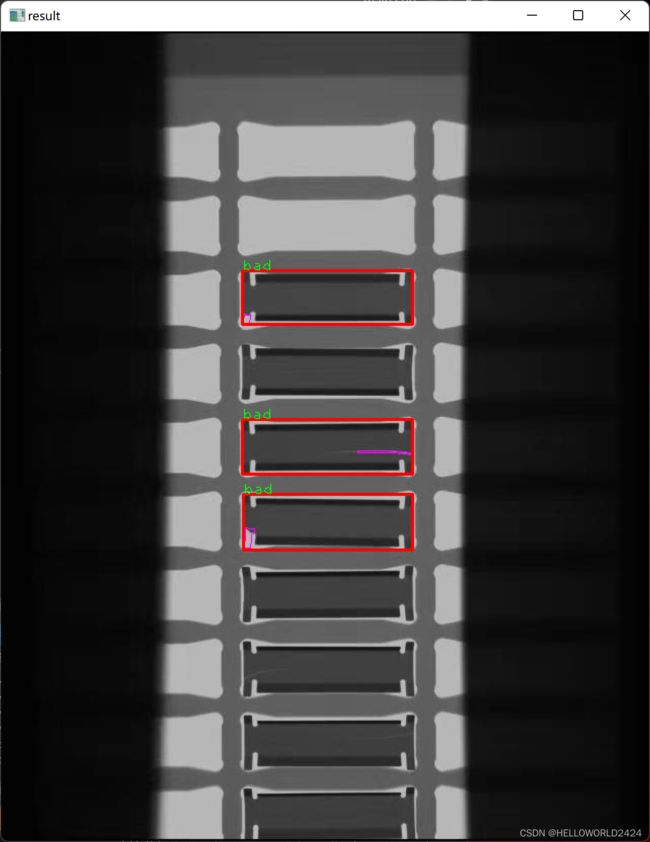
这里的目的是检测出有缺陷的刀片,如下图。
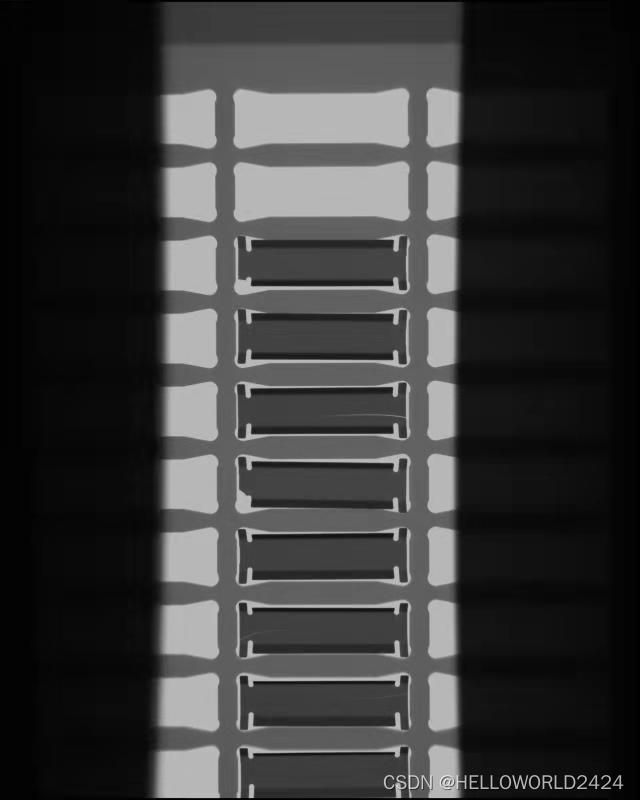
先总结一下思路,这里首先需要将图像进行二值化,通过轮廓的查找,找到刀片所有的刀片,然后进入缺陷的识别。缺陷识别主要还是选取一个没有缺陷的模板,然后对相应的二值图像进行相减操作,得出缺陷,通过形态学开操作,去掉一部分的噪声,并通过面积,位置信息等排除掉干扰项,就可以完成检测了。
下面附上实现的代码:
void sort_box(vector<Rect> &boxes);
void detect_defect(Mat &src, Mat &binary, vector<Rect> rects, vector<Rect> &defect);
Mat tpl;
int Advance::blade() {
Mat src = imread("D:/images/ce_01.jpg");
if (src.empty()) {
printf("could not load image file...");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
// 图像二值化
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY_INV | THRESH_OTSU);
imshow("binary", binary);
// 定义结构元素
Mat se = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(binary, binary, MORPH_OPEN, se);
imshow("open-binary", binary);
// 轮廓发现
vector<vector<Point>> contours;
vector<Vec4i> hirarchy;
vector<Rect> rects;
findContours(binary, contours, hirarchy, RETR_LIST, CHAIN_APPROX_SIMPLE);
int height = src.rows;
for (size_t t = 0; t < contours.size(); ++t) {
Rect rect = boundingRect(contours[t]);
double area = contourArea(contours[t]);
if (rect.height > (height / 2) | area < 150) {
continue;
}
rects.push_back(rect);
//rectangle(src, rect, Scalar(0, 0, 255), 2);
//drawContours(src, contours, t, Scalar(0, 0, 255), 2);
}
sort_box(rects);
tpl = binary(rects[1]);
//for (int i = 0; i < rects.size(); ++i) {
// putText(src, format("%d", i), rects[i].tl(), FONT_HERSHEY_PLAIN, 1.0, Scalar(0, 255, 0));
//}
vector<Rect> defects;
detect_defect(src, binary, rects, defects);
for (int i = 0; i < defects.size(); i++) {
rectangle(src, defects[i], Scalar(0, 0, 255), 2);
putText(src, "bad", defects[i].tl(), FONT_HERSHEY_PLAIN, 1.0, Scalar(0, 255, 0));
}
imshow("result", src);
waitKey(0);
}
void sort_box(vector<Rect> &boxes) {
int size = boxes.size();
for (int i = 0; i < size - 1; ++i) {
for (int j = i; j < size; j++) {
int x = boxes[j].x;
int y = boxes[j].y;
if (y < boxes[i].y) {
Rect temp = boxes[i];
boxes[i] = boxes[j];
boxes[j] = temp;
}
}
}
}
void detect_defect(Mat &src, Mat &binary, vector<Rect> rects, vector<Rect> &defect) {
int h = tpl.rows;
int w = tpl.cols;
int size = rects.size();
for (int i = 0; i < size; ++i) {
//构建diff
Mat roi = binary(rects[i]);
resize(roi, roi, tpl.size());
Mat mask;
subtract(tpl, roi, mask);
Mat se = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(mask, mask, MORPH_OPEN, se);
threshold(mask, mask, 0, 255, THRESH_BINARY);
//根据diff查找缺陷,阈值化
int count = 0;
for (int row = 0; row < h; ++row) {
for (int col = 0; col < w; ++col) {
int pv = mask.at<uchar>(row, col);
if (pv == 255) {
count++;
}
}
}
// 填充一个像素宽
int mh = mask.rows + 2;
int mw = mask.cols + 2;
Mat m1 = Mat::zeros(Size(mw, mh), mask.type());
Rect mroi;
mroi.x = 1;
mroi.y = 1;
mroi.height = mask.rows;
mroi.width = mask.cols;
mask.copyTo(m1(mroi));
// 轮廓分析
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(m1, contours, hierarchy, RETR_LIST, CHAIN_APPROX_SIMPLE);
bool find = false;
for (size_t t = 0; t < contours.size(); ++t) {
Rect rect = boundingRect(contours[t]);
float ratio = (float)rect.width / ((float)rect.height);
if (ratio > 4.0 && (rect.y < 5 || (m1.rows - (rect.height + rect.y)) < 10)) {
continue;
}
double area = contourArea(contours[t]);
if (area > 10) {
printf("index: %d, ratio: %.2f, area: %.2f\n", i, ratio, area);
find = true;
// 绘制缺陷
Mat sroi = src(rects[i]);
drawContours(sroi, contours, t, Scalar(255, 0, 255), 0.5);
imshow("sroi", sroi);
}
}
if (count > 50 && find == true) {
printf("index: %d, count: %d\n", i, count);
defect.push_back(rects[i]);
}
imshow("mask", mask);
waitKey(0);
}
// 返回结果
destroyAllWindows();
}
执行过程

执行结果:
案例二:使用HOG特征描述加SVM进行表计的识别
本案例的目的是使用HOG对图片进行特征提取,然后使用SVM判断检测窗口是否有表计,属于传统的目标检测范畴。实验的数据分为positive,即有表计的图片,negative,没有表计的图片。以及test,测试样例图片。

下面是其中一张示例的图片。

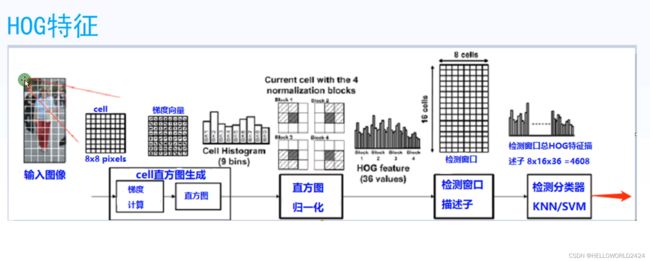
对于训练图片,我们统一resize成(128, 64) (宽, 高)大小,64 * 128 = 8 * 16 cells (高,宽),所以经过特征提取后,HOG特征数为36,总计数目 7*15*36=3780个特征。所以输出的维度应为(1, 3780)。1是batch_size,文字的表述和图上有些一致,以文字为准即可。
string positive_dir = "D:/images/elec_watch/positive";
string negative_dir = "D:/images/elec_watch/negative";
void get_hog_descriptor(Mat &image, vector<float> &desc);
void generate_dataset(Mat &trainData, Mat &label);
void svm_train(Mat &trainData, Mat &labels);
int Advance::instrument() {
// 读取和生成数据集
Mat trainData = Mat::zeros(Size(3780, 26), CV_32FC1);
Mat labels = Mat::zeros(Size(1, 26), CV_32SC1);
generate_dataset(trainData, labels);
// SVM train, and save model
svm_train(trainData, labels);
// load model
Ptr<SVM> svm = SVM::load("D:/images/elec_watch/test.xml");
// detect object
Mat test = imread("D:/images/elec_watch/test/scene_01.jpg");
resize(test, test, Size(0, 0), 0.2, 0.2);
imshow("input", test);
Rect winRect;
winRect.width = 64;
winRect.height = 128;
int sum_x = 0;
int sum_y = 0;
int count = 0;
// 开窗检测...
for (int row = 64; row < test.rows - 64; row += 4) {
for (int col = 32; col < test.cols - 32; col += 4) {
winRect.x = col - 32;
winRect.y = row - 64;
vector<float> fv;
Mat test_win = test(winRect);
get_hog_descriptor(test_win, fv);
Mat one_row = Mat::zeros(Size(fv.size(), 1), CV_32FC1);
for (int i = 0; i < fv.size(); ++i) {
one_row.at<float>(0, i) = fv[i];
}
float result = svm->predict(one_row);
if (result > 0) {
//rectangle(test, winRect, Scalar(0, 0, 255));
sum_x += winRect.x;
sum_y += winRect.y;
count++;
}
}
}
winRect.x = sum_x / count;
winRect.y = sum_y / count;
rectangle(test, winRect, Scalar(255, 0, 0));
imshow("object detection result", test);
waitKey(0);
return 0;
}
void get_hog_descriptor(Mat &image, vector<float> &desc) {
HOGDescriptor hog;
int h = image.rows;
int w = image.cols;
float rate = 64.0 / w;
Mat img, gray;
resize(image, img, Size(64, int(rate*h)));
cvtColor(img, gray, COLOR_BGR2GRAY);
// 图像统一resize成(128, 64)
Mat result = Mat::zeros(Size(64, 128), CV_8UC1);
result = Scalar(127);
Rect roi;
roi.x = 0;
roi.width = 64;
roi.y = (128 - gray.rows) / 2;
roi.height = gray.rows;
gray.copyTo(result(roi));
// cell = 8 * 8像素块
// 64 * 128 = 8 * 16 cells
// 总计数目 7*15*36=3780
hog.compute(result, desc, Size(8, 8), Size(0, 0));
printf("desc len: %d\n", desc.size());
}
void generate_dataset(Mat &trainData, Mat &labels) {
vector<string> images;
glob(positive_dir, images);
int pos_num = images.size();
for (int i = 0; i < images.size(); ++i) {
Mat image = imread(images[i].c_str());
vector<float> fv;
get_hog_descriptor(image, fv);
for (int j = 0; j < fv.size(); ++j) {
trainData.at<float>(i, j) = fv[j];
}
labels.at<int>(i, 0) = 1;
}
images.clear();
glob(negative_dir, images);
for (int i = 0; i < images.size(); ++i) {
Mat image = imread(images[i].c_str());
vector<float> fv;
get_hog_descriptor(image, fv);
for (int j = 0; j < fv.size(); ++j) {
trainData.at<float>(i+pos_num, j) = fv[j];
}
labels.at<int>(i+pos_num, 0) = -1;
}
}
void svm_train(Mat &trainData, Mat &labels) {
printf("\n start SVM training... \n");
Ptr<SVM> svm = SVM::create();
svm->setC(2.67);
svm->setType(SVM::C_SVC);
svm->setKernel(SVM::LINEAR);
svm->setGamma(5.383);
svm->train(trainData, ROW_SAMPLE, labels);
clog << "...[Done]" << endl;
printf("end train...\n");
svm->save("D:/images/elec_watch/test.xml");
}
案例三 二维码检测
知识点:二维码特征、图像二值化、轮廓提取、透视变换、几何分析

核心重点:主要使用图像的二值化,然后findcontour找到轮廓,利用透视摆正。利用外接矩形的宽高比过滤一部分不合适的选项,然后使用二维码固有特征。找到左上,右上,左下的三个正方形。并且如上图b1x:w1x:xb:w2x:b2x=1:1:3:1:1。这样就可以过滤其他的轮廓,得到正确值。
代码部分:
void scanAndDetectQRCode(Mat &image) {
Mat gray, binary;
cvtColor(image, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("binary", binary);
// detect rectangle now
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
Moments monents;
findContours(binary.clone(), contours, hireachy, RETR_LIST, CHAIN_APPROX_SIMPLE, Point());
Mat result = Mat::zeros(image.size(), CV_8UC1);
for (size_t t = 0; t < contours.size(); t++) {
double area = contourArea(contours[t]);
if (area < 100) continue;
RotatedRect rect = minAreaRect(contours[t]);
float w = rect.size.width;
float h = rect.size.height;
float rate = min(w, h) / max(w, h);
if (rate > 0.85 && w < image.cols / 4 && h < image.rows / 4) {
Mat qr_roi = transformCorner(image, rect);
// 根据矩形特征进行几何分析
if (isXCorner(qr_roi)) {
drawContours(image, contours, static_cast<int>(t), Scalar(255, 0, 0), 2, 8);
drawContours(result, contours, static_cast<int>(t), Scalar(255), 2, 8);
}
}
}
//scan all key points
vector<Point> pts;
for (int row = 0; row < result.rows; row++) {
for (int col = 0; col < result.cols; col++) {
int pv = result.at<uchar>(row, col);
if (pv == 255) {
pts.push_back(Point(col, row));
}
}
}
RotatedRect rrt = minAreaRect(pts);
Point2f vertices[4];
rrt.points(vertices);
pts.clear();
for (int i = 0; i < 4; i++) {
line(image, vertices[i], vertices[(i + 1) % 4], Scalar(0, 255, 0), 2);
pts.push_back(vertices[i]);
}
Mat mask = Mat::zeros(result.size(), result.type());
vector<vector<Point>> cpts;
cpts.push_back(pts);
drawContours(mask, cpts, 0, Scalar(255), -1, 8);
Mat dst;
bitwise_and(image, image, dst, mask);
imshow("detect result", image);
imshow("result-mask", mask);
imshow("qrcode-roi", dst);
//imshow("contour-image", image);
//imshow("result", result);
}
bool isXCorner(Mat &image) {
Mat gray, binary;
cvtColor(image, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
int xb = 0, yb = 0;
int w1x = 0, w2x = 0;
int b1x = 0, b2x = 0;
int width = binary.cols;
int height = binary.rows;
int cy = height / 2;
int cx = width / 2;
int pv = binary.at<uchar>(cy, cx);
if (pv == 255) return false;
// verify finder pattern
bool findleft = false, findright = false;
int start = 0, end = 0;
int offset = 0;
while (true) {
offset++;
if ((cx - offset) <= width / 8 || (cx + offset) >= width - 1) {
start = -1;
end = -1;
break;
}
pv = binary.at<uchar>(cy, cx - offset);
if (pv == 255) {
start = cx - offset;
findleft = true;
}
pv = binary.at<uchar>(cy, cx + offset);
if (pv == 255) {
end = cx + offset;
findright = true;
}
if (findleft&&findright) {
break;
}
}
if (start <= 0 || end <= 0) {
return false;
}
xb = end - start;
for (int col = start; col > 0; col--) {
pv = binary.at<uchar>(cy, col);
if (pv == 0) {
w1x = start - col;
break;
}
}
for (int col = end; col < width - 1; col++) {
pv = binary.at<uchar>(cy, col);
if (pv == 0) {
w2x = col - end;
break;
}
}
for (int col = (end + w2x); col < width; col++) {
pv = binary.at<uchar>(cy, col);
if (pv == 255) {
b2x = col - end - w2x;
break;
}
else {
b2x++;
}
}
for (int col = start - w1x; col > 0; col--) {
pv = binary.at<uchar>(cy, col);
if (pv == 255) {
b1x = start - w1x - col;
break;
}
else {
b1x++;
}
}
float sum = xb + b1x + b2x + w1x + w2x;
//printf("xb : %d, b1x = %d, b2x = %d, w1x = %d, w2x = %d\n", xb, b1x, b2x, w1x, w2x);
xb = static_cast<int>((xb / sum)*7.0 + 0.5);
b1x = static_cast<int>((b1x / sum)*7.0 + 0.5);
b2x = static_cast<int>((b2x / sum)*7.0 + 0.5);
w1x = static_cast<int>((w1x / sum)*7.0 + 0.5);
w2x = static_cast<int>((w2x / sum)*7.0 + 0.5);
printf("xb : %d, b1x = %d, b2x = %d, w1x = %d, w2x = %d\n", xb, b1x, b2x, w1x, w2x);
if ((xb == 3 || xb == 4) && b1x == b2x && w1x == w2x && w1x == b1x && b1x == 1) { // 1:1:3:1:1
return true;
}
else {
return false;
}
}
bool isYCorner(Mat &image) {
Mat gray, binary;
cvtColor(image, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY | THRESH_OTSU);
int width = binary.cols;
int height = binary.rows;
int cy = height / 2;
int cx = width / 2;
int pv = binary.at<uchar>(cy, cx);
int bc = 0, wc = 0;
bool found = true;
for (int row = cy; row > 0; row--) {
pv = binary.at<uchar>(row, cx);
if (pv == 0 && found) {
bc++;
}
else if (pv == 255) {
found = false;
wc++;
}
}
bc = bc * 2;
if (bc <= wc) {
return false;
}
return true;
}
Mat transformCorner(Mat &image, RotatedRect &rect) {
int width = static_cast<int>(rect.size.width);
int height = static_cast<int>(rect.size.height);
Mat result = Mat::zeros(height, width, image.type());
Point2f vertices[4];
rect.points(vertices);
vector<Point> src_corners;
vector<Point> dst_corners;
dst_corners.push_back(Point(0, 0));
dst_corners.push_back(Point(width, 0));
dst_corners.push_back(Point(width, height));
dst_corners.push_back(Point(0, height));
for (int i = 0; i < 4; i++) {
src_corners.push_back(vertices[i]);
}
Mat h = findHomography(src_corners, dst_corners);
warpPerspective(image, result, h, result.size());
return result;
}
程序运行的结果输出如下图所示:

值得注意的是,我们调用透视变换api后的输出结果如下面图所示:



我们可以看到,二维码上面的三个定位矩形,经过透视变换以后,均已经摆正了,就可以接下来做我们的1:1:3:1:1的特征检测了。
案例四 kmean聚类
4.1 kmeans的原理
下面案例是在图片上随机生成点,然后再进行了kmeans的聚类。
void kmeans_data_demo() {
Mat img(500, 500, CV_8UC3);
RNG rng(12345);
Scalar colorTab[] = {
Scalar(0, 0, 255),
Scalar(255, 0, 0),
};
int numCluster = 2;
int sampleCount = rng.uniform(5, 500);
Mat points(sampleCount, 1, CV_32FC2);
for (int k = 0; k<numCluster; ++k)
{
Point center;
center.x = rng.uniform(0, img.cols);
center.y = rng.uniform(0, img.rows);
Mat pointChunk = points.rowRange(k*sampleCount / numCluster,
k == numCluster - 1 ? sampleCount : (k + 1)*sampleCount / numCluster);
rng.fill(pointChunk, RNG::NORMAL, Scalar(center.x, center.y), Scalar(img.cols*0.05, img.rows*0.05));
};
randShuffle(points, 1, &rng);
// 使用KMeans
Mat labels;
Mat centers;
kmeans(points, numCluster, labels, TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1), 3, KMEANS_PP_CENTERS, centers);
// 用不同颜色显示分类
img = Scalar::all(255);
for (int i = 0; i < sampleCount; i++) {
int index = labels.at<int>(i);
Point p = points.at<Point2f>(i);
circle(img, p, 2, colorTab[index], -1, 8);
}
// 每个聚类的中心来绘制圆
for (int i = 0; i < centers.rows; i++) {
int x = centers.at<float>(i, 0);
int y = centers.at<float>(i, 1);
printf("c.x= %d, c.y=%d\n", x, y);
circle(img, Point(x, y), 40, colorTab[i], 1, LINE_AA);
}
imshow("KMeans-Data-Demo", img);
waitKey(0);
}

4.2 kmean图片分割
下面代码进行了图片的分割,是基于像素级别的kmeans的聚类。
void kmeans_image_demo() {
Mat src = imread("D:/images/toux.jpg");
if (src.empty()) {
printf("could not load image...\n");
return;
}
namedWindow("input image", WINDOW_AUTOSIZE);
imshow("input image", src);
Vec3b colorTab[] = {
Vec3b(0, 0, 255),
Vec3b(0, 255, 0),
Vec3b(255, 0, 0),
Vec3b(0, 255, 255),
Vec3b(255, 0, 255)
};
int width = src.cols;
int height = src.rows;
int dims = src.channels();
int sampleCount = width * height;
int clusterCount = 3;
Mat labels;
Mat centers;
Mat sample_data = src.reshape(3, sampleCount);
Mat data;
sample_data.convertTo(data, CV_32F);
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(data, clusterCount, labels, criteria, clusterCount, KMEANS_PP_CENTERS, centers);
int index = 0;
Mat result = Mat::zeros(src.size(), src.type());
for (int row = 0; row < height; ++row) {
for (int col = 0; col < width; ++col) {
index = row * width + col;
int label = labels.at<int>(index, 0);
result.at<Vec3b>(row, col) = colorTab[label];
}
}
imshow("KMeans-image-Demo", result);
waitKey(0);
}

4.3 kmeans图片背景的替换
使用kmean进行图片分割然后替换背景
void kmeans_background_replace() {
Mat src = imread("D:/images/toux.jpg");
if (src.empty()) {
printf("could not load image...\n");
return;
}
namedWindow("input image", WINDOW_AUTOSIZE);
imshow("input image", src);
int width = src.cols;
int height = src.rows;
int dims = src.channels();
// 初始化定义
int simpleCount = width * height;
int clusterCount = 3;
Mat labels;
Mat centers;
Mat sample_data = src.reshape(3, simpleCount);
Mat data;
sample_data.convertTo(data, CV_32F);
// 运行kmeans
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(data, clusterCount, labels, criteria, clusterCount, KMEANS_PP_CENTERS, centers);
// 生成mask
Mat mask = Mat::zeros(src.size(), CV_8UC1);
int index = labels.at<int>(0, 0);
labels = labels.reshape(1, height);
for (int row = 0; row < height; row++) {
for (int col = 0; col < width; col++) {
int c = labels.at<int>(row, col);
if (c == index) {
mask.at<uchar>(row, col) = 255;
}
}
}
imshow("mask", mask);
Mat se = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
dilate(mask, mask, se);
// mask边缘进行高斯模糊
GaussianBlur(mask, mask, Size(5, 5), 0);
imshow("mask-blur", mask);
// 生成高斯权重图像融合
Mat result = Mat::zeros(src.size(), CV_8UC3);
for (int row = 0; row < height; ++row) {
for (int col = 0; col < width; ++col) {
float w1 = mask.at<uchar>(row, col) / 255.0;
Vec3b bgr = src.at<Vec3b>(row, col);
bgr[0] = w1 * 255.0 + bgr[0] * (1.0 - w1);
bgr[1] = w1 * 0 + bgr[1] * (1.0 - w1);
bgr[2] = w1 * 255.0 + bgr[2] * (1.0 - w1);
result.at<Vec3b>(row, col) = bgr;
}
}
imshow("background-replacement-demo", result);
waitKey(0);
}

4.4 kmeans生成图像色卡
有别4.1中使用位置信息聚类,这里使用的是像素值信息进行聚类。聚类以后通过label信息,在像素级别上面统计不同颜色的数量,然后进行色卡的绘制。
void kmeans_color_card() {
Mat src = imread("D:/images/master.jpg");
if (src.empty()) {
printf("could not load image...\n");
return;
}
namedWindow("input image", WINDOW_AUTOSIZE);
imshow("input image", src);
int width = src.cols;
int height = src.rows;
int dims = src.channels();
// 初始化定义
int sampleCount = width * height;
int clusterCount = 4;
Mat labels;
Mat centers;
Mat sample_data = src.reshape(3, sampleCount);
Mat data;
sample_data.convertTo(data, CV_32F);
// 运行K-Means
TermCriteria criteria = TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 0.1);
kmeans(data, clusterCount, labels, criteria, clusterCount, KMEANS_PP_CENTERS, centers);
Mat card = Mat::zeros(Size(width, 50), CV_8UC3);
vector<float> clusters(clusterCount);
for (int i = 0; i<labels.rows; i++){
clusters[labels.at<int>(i, 0)]++;
}
for (int i = 0; i < clusters.size(); i++) {
clusters[i] = clusters[i] / sampleCount;
}
int x_offset = 0;
cout << centers << endl;
for (int x = 0; x < clusterCount; ++x) {
Rect rect;
rect.x = x_offset;
rect.y = 0;
rect.height = 50;
rect.width = round(clusters[x] * width);
x_offset += rect.width;
float b = centers.at<float>(x, 0);
float g = centers.at<float>(x, 1);
float r = centers.at<float>(x, 2);
rectangle(card, rect, Scalar(b, g, r), -1, 8, 0);
}
imshow("Image Color Card", card);
waitKey(0);
}
