关于卷积神经网络CNN
卷积神经网络
卷积操作:
卷积核和扫过的区域对应位置相乘再求和的操作,卷积完成后一般要加个偏置bias。一种Kernel如果分成多个通道上的子Kernel做卷积运算,最后运算结果还要加在一起后,再加偏置
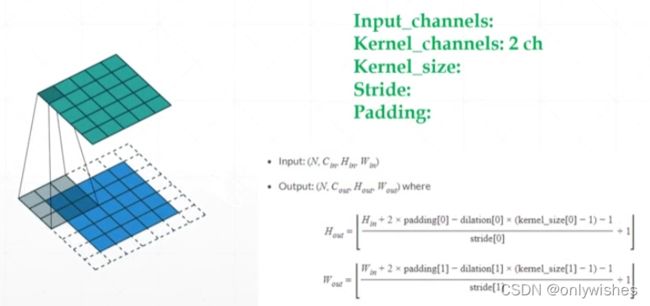
input_channels:输入的通道
kernel_channels:有几个卷积核
kernel_size:卷积核的大小
stride:卷积核移动的步长
padding:打补丁,1就是1层
multi-kernels
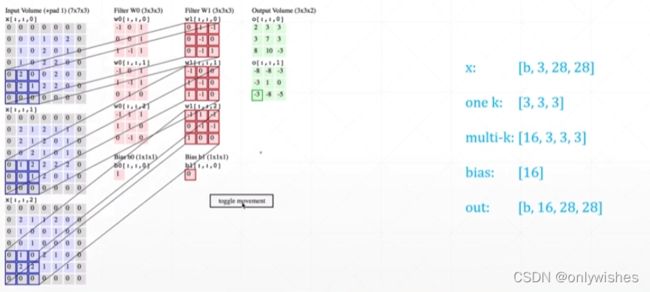
多kernel情况参数理解
x: b张照片,每张3个通道,大小28*28
onek:一个核的通道与照片是一样的,大小任意选
multi-k:核的数量,核的通道,大小
bias:每个核都有一个偏置,有多少核就有多少偏置
out:输入多少张就输出多少张,有多少个核就多少通道,最后大小根据情况输出
nn.Conv2d
二维卷积可以处理二维数据
nn.Conv2d( in_channels, out_channels,kernels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True))
参数:
in_channel: 输入数据的通道数,例RGB图片通道数为3;
out_channel: 输出数据的通道数,这个根据模型调整;
kennel_size: 卷积核大小,可以是int,或tuple;kennel_size=2,意味着卷积大小(2,2), kennel_size=(2,3),意味着卷积大小(2,3)即非正方形卷积
stride:步长,默认为1,与kennel_size类似,stride=2,意味着步长上下左右扫描皆为2, stride=(2,3),左右扫描步长为2,上下为3;
padding: 周围使用零填充
cove1d:用于文本数据,只对宽度进行卷积,对高度不进行卷积 cove2d:用于图像数据,对宽度和高度都进行卷积
import torch
import torch.nn as nn
layer = nn.Conv2d(1,3,kernel_size=3,stride=1,padding=0) #卷积层
x = torch.rand(1,1,28,28) #样本数=1,通道数=1,
out = layer.forward(x) # 向前传播
print(out.size()) #3个核3个通道
layer = nn.Conv2d(1,3,kernel_size=3,stride=2,padding=1)
out = layer.forward(x)
print(out.size())
out = layer(x) #__call__魔法,先运行hooks再运行.forward()函数.实际使用方法
print(out.size())torch.Size([1, 3, 26, 26])
torch.Size([1, 3, 14, 14])
torch.Size([1, 3, 14, 14])inner weight & bias
inner_layer是一个卷积层,卷积层中所包含的参数由两个部分,一是卷积核权重矩阵weight,二是卷积核的偏置bias。因此,输出有layer2.layer_inner.weight和layer2.layer_inner.bias
layer = nn.Conv2d(1,3,kernel_size=3,stride=2,padding=1)
w = layer.weight
print(w) #一个核三个通道的权重
print(layer.weight.shape)
print(layer.bias.shape) #一个核几个通道几个偏置Parameter containing:
tensor([[[[-0.2343, 0.1892, 0.2940], #每个通道的权重
[ 0.0495, 0.1050, 0.1973],
[ 0.3005, -0.2877, 0.0205]]],
[[[ 0.1760, -0.1302, 0.2827],
[-0.0858, -0.0841, -0.2342],
[ 0.1552, -0.1263, -0.2716]]],
[[[-0.1086, 0.1004, -0.2107],
[-0.0503, 0.2460, -0.0588],
[ 0.0419, 0.2345, 0.1198]]]], requires_grad=True)
torch.Size([3, 1, 3, 3])
torch.Size([3]) #3通3偏置
F.conv2d
nn.Conv2d是[2D卷积层],而F.conv2d是[2D卷积操作]
import torch
from torch.nn import functional as F
'''手动定义卷积核(weight)和偏置'''
w = torch.rand(16,3,5,5) #16种3通道的5*5卷积核
b = torch.rand(16) #和卷积核种类数一致
'''定义输入样本'''
x = torch.randn(1,3,28,28) #1张3通道的28*28的图像
'''2D卷积输出'''
out = F.conv2d(x,w,b,stride=1,padding=1) #步长为1,加一圈0
print(out.shape)
out = F.conv2d(x,w,b,stride=2,padding=2)
print(out.shape)torch.Size([1, 16, 26, 26])
torch.Size([1, 16, 14, 14])
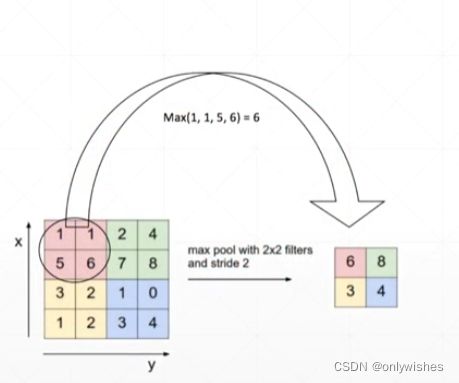
池化层与采样
pooling下采样
分为maxpooling 和avgpooling,
池化层在卷积神经网络中的作用在于特征融合和降维。池化也是一种类似的卷积操作,
maxpooing 就是一个核在数据上滑动,取最大值输出
class torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)maxpooling有局部不变性而且可以提取显著特征的同时降低模型的参数,从而降低模型的过拟合。
avgpooling 就是取平均值输出,输出大小都由步长影响
import torch
from torch.nn import functional as F
import torch.nn as nn
x = torch.randn(1,16,14,14)
'''从nn中导入最大池化'''
layer = nn.MaxPool2d(2,stride=2) #步长2
out = layer(x)
print(out.shape)
'''使用F.方式平均池化'''
out = F.avg_pool2d(x,2,stride=2)
print(out.shape)
torch.Size([1, 16, 7, 7])
torch.Size([1, 16, 7, 7])upsample上采样
使用torch.nn.functional.interpolate( input, size, scale_factor , mode)
imput:输入的tensor
size:输出的大小
scal_factor(float or turtle[float]):缩放因子,如果是turtle,要与输入的大小相匹配
mode (str): 上采样所用的算法,默认'nearest'
x = out #torch.Size([1, 16, 7, 7])
out = F.interpolate(x,scale_factor=2,mode='nearest') #采用最近邻采样
print(out.shape) #torch.Size([1, 16, 14, 14])
out = F.interpolate(x,scale_factor=3,mode='nearest')
print(out.shape) #torch.Size([1, 16, 21, 21])Relu激活函数
把图片中负的单元去掉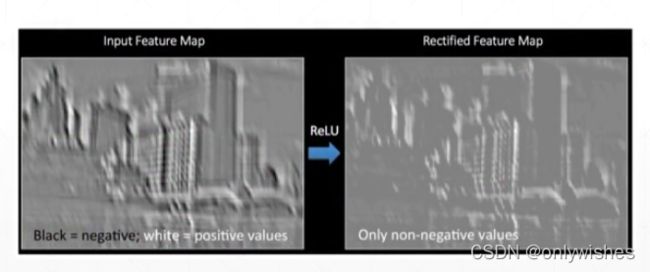
x = torch.randn(1,16,7,7)
'''采用nn.'''
layer = nn.ReLU(inplace=True) #True直接替代
out = layer(x)
print(out.shape) #torch.Size([1, 16, 7, 7])
'''采用F.'''
out = F.relu(x)
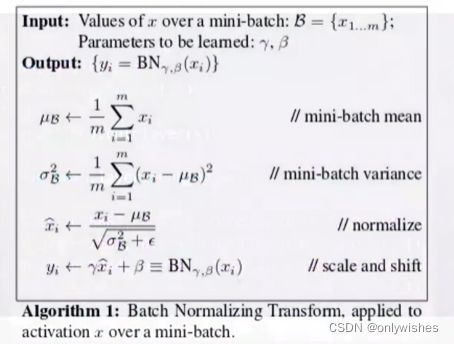
print(out.shape) #torch.Size([1, 16, 7, 7])BatchNorm
说明:
归一化就是要把需要处理的数据经过处理后(通过某种算法)限制在你需要的一定范围内。
首先归一化是为了后面数据处理的方便,其次是保证程序运行时收敛加快。归一化的具体作用是归纳统一样本的统计分布性。归一化在0-1之间是统计的概率分布
归一化的目的是使得没有可比性的数据变得具有可比性,同时又保持相比较的两个数据之间的相对关系,如大小关系或是为了作图方便,原来很难在一张图上作出来的图形,归一化后就可以很方便的显示出在图上的相对位置等。
标准化是处理后的数据服从N (0,1) 的正态分布。
在模型训练时,批量归一化利用小批量上的均值和标准差,不断调整神经网络的中间输出,从而使整个神经网络在各层的中间输出的数值更稳定
批量标准化的优点
可以使用更大的学习率,也更稳定
加速模型收敛,可以不用精心设计权值初始化
可以不用 dropout 或者较小的 dropout
batchnorm1d用于全连接层
nn.batchnorm( input)
input:输入的feature数量
x = torch.randn(100,16)+0.5 #x~N(0.5,1)
layer = torch.nn.BatchNorm1d(16)
print(layer.running_mean) #初始化均值
print(layer.running_var) #初始化方差
out = layer(x)
print(layer.running_mean) #批量标准化后均值
print(layer.running_var) #方差tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.])
tensor([1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.])
tensor([0.0786, 0.0445, 0.0536, 0.0518, 0.0595, 0.0333, 0.0502, 0.0462, 0.0501,
0.0340, 0.0538, 0.0316, 0.0502, 0.0352, 0.0536, 0.0548])
tensor([0.9851, 0.9965, 0.9842, 0.9728, 0.9911, 1.0073, 0.9874, 1.0043, 0.9916,
0.9965, 0.9855, 0.9888, 0.9916, 0.9754, 0.9910, 0.9911])这里barch均值真实0.5,
barchnorm1d会慢慢更新u 来接近它真实的均值和方差而不是一次到位。
u' = (1-m)u + m*ut
u'为更新值,u为当前均值,初始化时为0,m的值在barchnorm1d中设置,不输入的话默认o.1,ut 为当前barch的均值
x = torch.randn(100,16)+0.5
layer = torch.nn.BatchNorm1d(16)
for i in range(100):
out = layer(x) #每一次循环layer里面的值都改变,不是初始化的值,由上一次得出下一次
print(layer.running_mean) #100次就很接近ut的真实值了
print(layer.running_var) #方差tensor([0.3660, 0.4934, 0.6168, 0.5528, 0.6549, 0.4958, 0.3614, 0.5894, 0.6229,
0.3940, 0.5559, 0.5998, 0.5506, 0.5580, 0.4186, 0.5184]) #大部分接近0.5了
tensor([1.0823, 0.9604, 0.8071, 0.9483, 0.8612, 0.9657, 1.0367, 1.1214, 1.1335,
1.2873, 1.0255, 0.6689, 1.1824, 0.8369, 1.0292, 0.9861]) #接近batchnorm2d用于卷积层
x = torch.rand(1,16,7,7)
layer = nn.BatchNorm2d(16) #必须与上面的值相等,
out = layer(x)
print(out.shape)
print(layer.weight) #这里的weight相当于γ
print(layer.weight.shape) #
print(layer.bias.shape) #相当于βclass variables
打印输出所有的类
x = torch.rand(1,16,7,7)
layer = nn.BatchNorm2d(16)
out = layer(x)
print(vars(layer)){
'training': True, ##表是当前状态
'_parameters': OrderedDict([('weight', Parameter containing:
tensor([1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.],
requires_grad=True)), ('bias', Parameter containing:
tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
requires_grad=True))]),
'_buffers': OrderedDict([('running_mean', tensor([0.0534, 0.0456, 0.0509, 0.0522, 0.0455, 0.0464, 0.0489, 0.0455, 0.0587,
0.0477, 0.0530, 0.0576, 0.0459, 0.0435, 0.0512, 0.0524])), ('running_var', tensor([0.9089, 0.9075, 0.9086, 0.9084, 0.9083, 0.9068, 0.9081, 0.9083, 0.9095,
0.9071, 0.9082, 0.9095, 0.9064, 0.9082, 0.9091, 0.9074])), ('num_batches_tracked', tensor(1))]),
'_non_persistent_buffers_set': set(),
'_backward_hooks': OrderedDict(),
'_is_full_backward_hook': None,
'_forward_hooks': OrderedDict(),
'_forward_pre_hooks': OrderedDict(),
'_state_dict_hooks': OrderedDict(),
'_load_state_dict_pre_hooks': OrderedDict(),
'_modules': OrderedDict(),
'num_features': 16,
'eps': 1e-05,
'momentum': 0.1,
'affine': True, ##表示β和γ需要自动学习
'track_running_stats': True
}
test
在test时u和方差没法更新,使用全局的running 不需要β和γ
因此要加入以下一行代码
layer.eval()nn.module
1、包含所有常用方法
比如nn.Linear、nn.BatchNorm2d、nn.Conv2d等等都继承于nn.module。并且还可以嵌套使用
所有其他网络都是这个类的继承。我们在自己定义一个网络或者层时,就需要继承这个类。module允许以树结构进行嵌入,一个module可以包含其他module,这个module就是原有module的submodule
2、使用nn.Sequential()容器
nn.Module中的和自己写的都可以在这里使用
classNet中首先通过super函数继承torch.nn.Module模块的构造方法,再通过添加属性的方式搭建神经网络各层的结构信息,在forward方法中完善神经网络各层之间的连接信息,然后再通过定义Net类对象的方式完成对神经网络结构的构建.
自定义层时必须要继承nn.Module,并且在其构造函数中需要调用nn.Module的构造函数
快速构建方法,就是通过torch.nn.Sequential,直接完成对神经网络的建立。
import torch.nn as nn
net = nn.Sequential(
nn.Conv2d(1,32,5,1,1),
nn.MaxPool2d(2,2),
nn.ReLU(True),
nn.BatchNorm2d(32),
nn.Conv2d(32,64,3,1,1),
nn.ReLU(True),
nn.BatchNorm2d(64),
nn.Conv2d(64,64,3,1,1),
nn.MaxPool2d(2,2),
nn.ReLU(True),
nn.BatchNorm2d(64),
nn.Conv2d(64,128,3,1,1),
nn.ReLU(True),
nn.BatchNorm2d(128)
)
print(net)Sequential(
(0): Conv2d(1, 32, kernel_size=(5, 5), stride=(1, 1), padding=(1, 1))
(1): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(2): ReLU(inplace=True)
(3): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(4): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): ReLU(inplace=True)
(6): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(7): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(9): ReLU(inplace=True)
(10): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(11): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(12): ReLU(inplace=True)
(13): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
3、nn.Module可以自动管理parameters
对于Sequential实例中含模型参数的层,我们可以通过Module类的parameters()或者named_parameters方法来访问所有参数(以迭代器的形式返回),后者除了返回参数Tensor外还会返回其名字
直接输出网络的参数是无法输出出来的,需要调用list将其输出
net = nn.Sequential(nn.Linear(4,2),nn.Linear(2,2))
print(list(net.parameters())[0].shape) #第0层的weight,由于w输入和输出位置相反所以反着
print(list(net.parameters())[3].shape) #第1层的偏置
print(list(net.named_parameters())[0]) #带名字
print(list(net.named_parameters())[1])
print(dict(net.named_parameters()).items()) #字典形式返回参数信息torch.Size([2, 4])
torch.Size([2])
('0.weight', Parameter containing:
tensor([[-0.1850, -0.3564, -0.0868, 0.2885],
[ 0.4072, 0.4144, 0.3386, 0.0323]], requires_grad=True))
('0.bias', Parameter containing:
tensor([-0.4205, -0.1766], requires_grad=True))
dict_items([('0.weight', Parameter containing:
tensor([[-0.1850, -0.3564, -0.0868, 0.2885],
[ 0.4072, 0.4144, 0.3386, 0.0323]], requires_grad=True)),
('0.bias', Parameter containing:
tensor([-0.4205, -0.1766], requires_grad=True)),
('1.weight', Parameter containing:
tensor([[ 0.6508, -0.4416],
[ 0.2194, -0.5437]], requires_grad=True)),
('1.bias', Parameter containing:
tensor([-0.3002, -0.2581], requires_grad=True))])
因此可以把这些用parameters直接传到优化器中
optimizer = optim.SGD(net.parameters(),lr=1e-3)4、modules
modules:所有的结点,
children:直系亲属,儿子女儿
class BasicNet(nn.Module):
def __init__(self):
super(BasicNet, self).__init__()
self.net = nn.Linear(4, 3)
def forward(self, x):
return self.net(x)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.net = nn.Sequential(BasicNet(),
nn.ReLU(),
nn.Linear(3, 2))
def forward(self, x):
return self.net(x)
net = Net()
#print(list(net.named_children()))
#print(list(net.named_modules()))
for m in net.named_children(): # 打印直系亲属
print('children:', m)
for m in net.named_modules(): #所有结点
print('modules:', m)
children: ('net', Sequential( #只有一个直系sequential,里面包含3个,其中BasicNet又包一个
(0): BasicNet(
(net): Linear(in_features=4, out_features=3, bias=True)
)
(1): ReLU()
(2): Linear(in_features=3, out_features=2, bias=True)
))
modules: ('', Net( #根节点,包含本身共有6个结点
(net): Sequential(
(0): BasicNet(
(net): Linear(in_features=4, out_features=3, bias=True)
)
(1): ReLU()
(2): Linear(in_features=3, out_features=2, bias=True)
)
))
modules: ('net', Sequential( #次根,5个节点
(0): BasicNet(
(net): Linear(in_features=4, out_features=3, bias=True)
)
(1): ReLU()
(2): Linear(in_features=3, out_features=2, bias=True)
))
modules: ('net.0', BasicNet( #2个
(net): Linear(in_features=4, out_features=3, bias=True)
))
modules: ('net.0.net', Linear(in_features=4, out_features=3, bias=True)) #1
modules: ('net.1', ReLU()) #1
modules: ('net.2', Linear(in_features=3, out_features=2, bias=True)) #1
5、to(device)
在什么设备上使用
device = torch.device('cuda')
net = Net()
net.to(device) #.to()会返回net引用和原来一样,但是tensor不一样6、save and load
在训练时时间可能会很久,为防止意外,要隔一段时间保存一下数据,
state_dict()会返回当前训练的状态,save ()会将其保存到文件里
若之前意外停止,重新开始时 先使用 load()将上次保存的加载为pytorch类,在加载到module里面去,里面的值初始化为上次训练好的值。不需要重新初始化
net.load_state_dict(torch.load('ckpt.mdl')) #开始时加载模型
#train
torch.save(net.state_dict(),'ckpt.mdl') 7、train / test
不同的类训练测试方法可能不一样,因此
使用nn.traini()就切换到训练模式
使用nn.eval()就切换到测试模式
# train
net.train()
...
# test
net.eval()
...8、实现我们自己的类
class MyLinear(nn.Module):
def __init__(self, inp, outp): #w[outp,inp]
super(MyLinear, self).__init__()
# requires_grad = True
self.w = nn.Parameter(torch.randn(outp, inp)) # nn.Parameter会自动地将torch.tensor通过nn.Parameter加到nn.parameter()里面去
self.b = nn.Parameter(torch.randn(outp))
def forward(self, x):
x = x @ self.w.t() + self.b
return x这个和Linear是完全一样的
这里使用Parameter会自动设置参数需要读信息,并且会将其送到parameter里可以使用优化器,tensor无法直接使用
实现一个打平的类,可以直接用
class Flatten(nn.Module): # 定义将所有的打平,在sequential里面一次forward就行
def __init__(self):
super(Flatten, self).__init__()
def forward(self, input): #二维才能送到线性层因此要打平
return input.view(input.size(0), -1) # -1表示将其他所有的打平
class TestNet(nn.Module):
def __init__(self):
super(TestNet, self).__init__()
self.net = nn.Sequential(nn.Conv2d(1, 16, stride=1, padding=1),
nn.MaxPool2d(2, 2),
Flatten(), # 实现自己的类,里面只能写类
nn.Linear(1 * 14 * 14, 10))
def forward(self, x):
return self.net(x)数据增强
Data argumentation 会减少出现过拟合的情况
1. Flip:翻转
2. Rotate 旋转
3. Random Move & Crop 随机裁剪
4. GAN : 生成更多的样本
5. Noise: N(0, 0.001)加高斯白噪声
这些操作都在torchvision包里面

通过这些操作可以根据少部分数据增加数据,增加数据后,情况会比原来好,但不会太好
train_loader = torch.utils.data.DataLoader(
datasets.MNIST('../data', train=True, download=True,
transform=transforms.Compose([ # Compose的操作类似于nn.Sequential里面
transforms.RandomHorizontalFlip(), # 水平角度的翻转 (随机翻转-可能翻转也有可能不翻转)
transforms.RandomVerticalFlip(), # 垂直方向
transforms.RandomRotation(15), # 旋转方向,-15到15
transforms.RandomRotation([90, 180, 270]), # 随机的从90度180度270度中挑一个角度旋转
transforms.Resize([32, 32]), # 传入的参数为list,可以实现放缩
transforms.RandomCrop([28, 28]), # 随机裁剪
transforms.ToTensor(),
# transforms.Normalize((0.1307,), (0.3081,))
])),
batch_size=batch_size, shuffle=True)