ROS -话题通信示例
写在最前
由于毕设是做ros机器人相关的上位机,因此本专题是做毕设所有过程的记录
学习资料参考内容如下:
B站Autolabor初级教程教学
Autolabor初级教程教学文档
主要是想记录自己的踩过的所有坑,内容可能比较零散,想看比较系统完备的知识请去参考上面两个链接
每个可视化操作对应于一个命令行
2.1 新建工作区
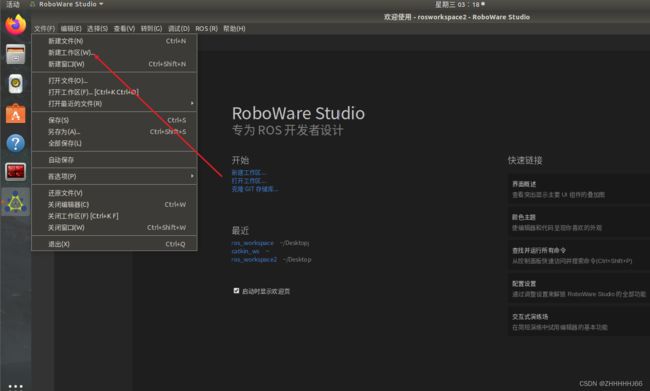
mkdir -p 自定义空间名称/src
2.2 点击debug按钮
这一步相当于在src目录中运行catkin make命令
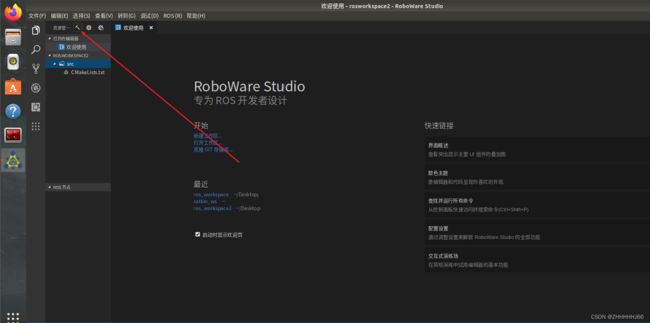
catkin_make
2.3 新建ros包 添加环境
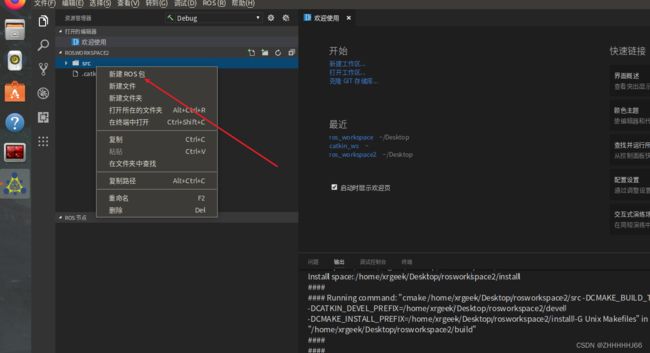
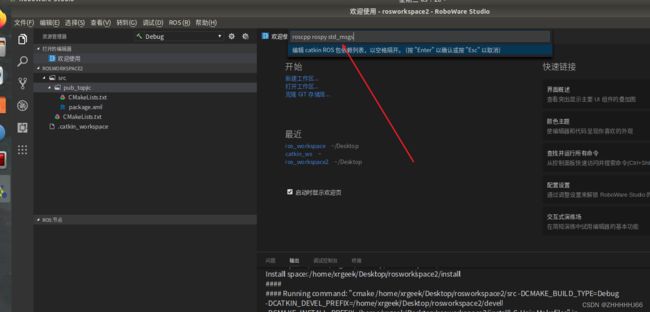
catkin_create_pkg 自定义ROS包名 roscpp rospy std_msgs
2.4 在包内部新建scripts文件夹
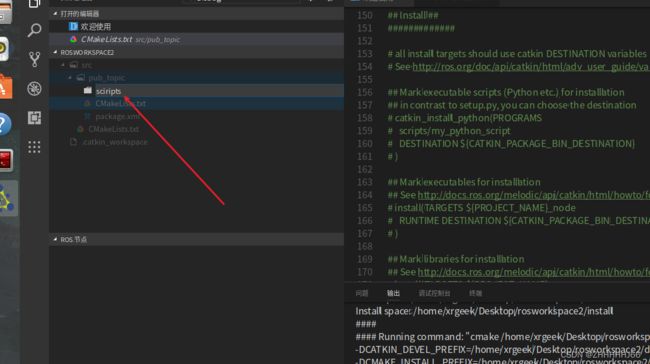
mkdir scripts
2.5 创建发布者节点pub.py
"""
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
PS: 二者需要设置相同的话题
消息发布方:
循环发布信息:HelloWorld 后缀数字编号
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 发布者 对象
4.组织被发布的数据,并编写逻辑发布数据
"""
#1.导包
import rospy
from std_msgs.msg import String
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("talker_p")
#3.实例化 发布者 对象
pub = rospy.Publisher("chatter",String,queue_size=10)
#4.组织被发布的数据,并编写逻辑发布数据
msg = String() #创建 msg 对象
msg_front = "hello 你好"
count = 0 #计数器
# 设置循环频率
rate = rospy.Rate(1)
while not rospy.is_shutdown():
#拼接字符串
msg.data = msg_front + str(count)
pub.publish(msg)
rate.sleep()
rospy.loginfo("写出的数据:%s",msg.data)
count += 1
2.6 创建订阅者节点sub.py
#!/usr/bin/env python3
"""
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 订阅者 对象
4.处理订阅的消息(回调函数)
5.设置循环调用回调函数
"""
#1.导包
import rospy
from std_msgs.msg import String
def doMsg(msg):
rospy.loginfo("I heard:%s",msg.data)
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("listener_p")
#3.实例化 订阅者 对象
sub = rospy.Subscriber("chatter",String,doMsg,queue_size=10)
#4.处理订阅的消息(回调函数)
#5.设置循环调用回调函数
rospy.spin()
2.7 用python3命令运行python节点
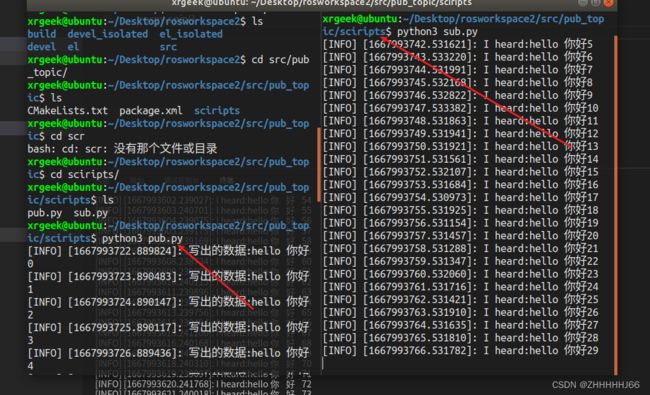
值得注意的是一般的视频教程会让你在/src/cmakelists文件里也要配置python解释器的环境,这样的话就可以在全局使用
rosrun 包名 xxx.py来运行python节点,但是我们要知道的是python节点也可以直接当作一个python程序来运行,即可以用python3 xxx.py来运行
2.8 利用rosrun命令运行python节点
- 在cmakelist添加解释器信息
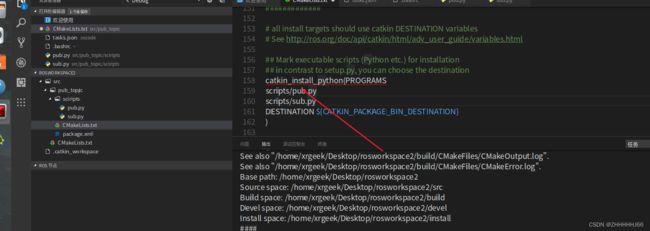
大概就在158行添加py文件的路径信息,注意这里可以直接填相对路径
- 添加环境变量(这可以让你在任何命令窗口用rosrun运行这个包)

- rosrun运行节点
rosurn 包名 xxx.py
值得注意的是,由于我的ros系统是melodic1.14.3,所以rosrun 包名 xxx.py这个命令是默认用的python2,所以最好还是用python3 xxx.py这种方式来运行python节点
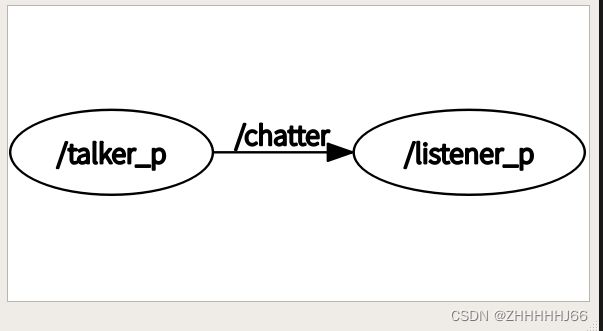
2.9 查看节点计算图
- 新打开一个命令行窗口输入
rosrun rqt_graph rqt_graph,可以看到以下计算图