ros话题通信-自定义msg
由于毕设是做ros机器人相关的上位机,因此本专题是做毕设所有过程的记录
学习资料参考内容如下:
B站Autolabor初级教程教学
Autolabor初级教程教学文档
主要是想记录自己的踩过的所有坑,内容可能比较零散,想看比较系统完备的知识请去参考上面两个链接
1. 创建msg文件
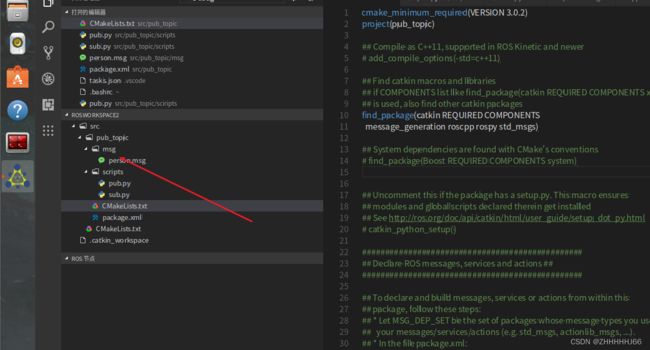
在功能包目录下创建msg文件夹,创建msg文件
2. 编写msg文件
string name
uint16 age
float64 height
有点类似于c语言的结构体?
3.配置package.xml和CMakeLists.txt
- 按照官方说法,创建玩msg文件还得配置两个文件
package.xml
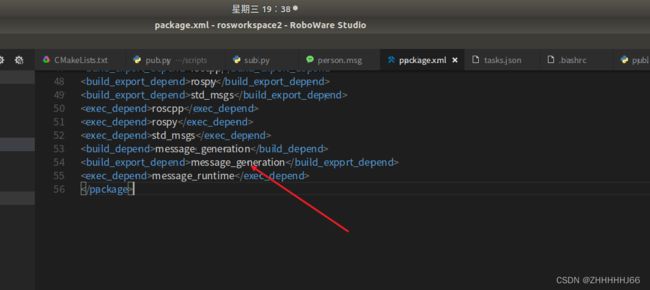
CMakeLists.txt


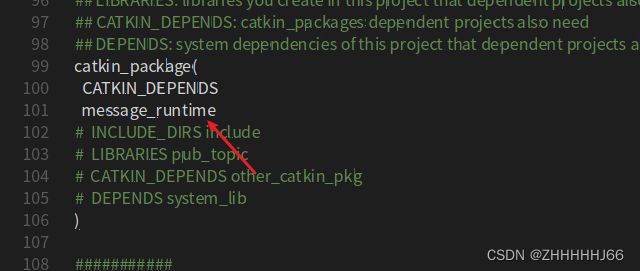
- but~由于我们用的是roboware studio 因此我们创建完msg文件后,系统都自动帮我们配置了哈哈哈哈哈,就是这么无敌
4.编译生成文件
我们点击debug按钮编译生成文件
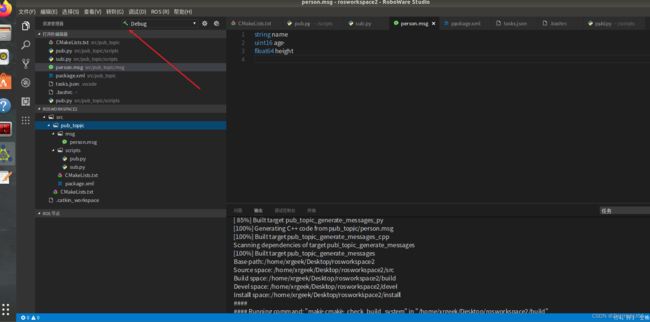
在这个目录下会生成一个py文件
# This Python file uses the following encoding: utf-8
"""autogenerated by genpy from pub_topic/person.msg. Do not edit."""
import sys
python3 = True if sys.hexversion > 0x03000000 else False
import genpy
import struct
class person(genpy.Message):
_md5sum = "81ccf2097ef38ca6466e5a60ea1f8e49"
_type = "pub_topic/person"
_has_header = False #flag to mark the presence of a Header object
_full_text = """string name
uint16 age
float64 height
"""
__slots__ = ['name','age','height']
_slot_types = ['string','uint16','float64']
def __init__(self, *args, **kwds):
"""
Constructor. Any message fields that are implicitly/explicitly
set to None will be assigned a default value. The recommend
use is keyword arguments as this is more robust to future message
changes. You cannot mix in-order arguments and keyword arguments.
The available fields are:
name,age,height
:param args: complete set of field values, in .msg order
:param kwds: use keyword arguments corresponding to message field names
to set specific fields.
"""
if args or kwds:
super(person, self).__init__(*args, **kwds)
#message fields cannot be None, assign default values for those that are
if self.name is None:
self.name = ''
if self.age is None:
self.age = 0
if self.height is None:
self.height = 0.
else:
self.name = ''
self.age = 0
self.height = 0.
def _get_types(self):
"""
internal API method
"""
return self._slot_types
def serialize(self, buff):
"""
serialize message into buffer
:param buff: buffer, ``StringIO``
"""
try:
_x = self.name
length = len(_x)
if python3 or type(_x) == unicode:
_x = _x.encode('utf-8')
length = len(_x)
buff.write(struct.pack('%length, length, _x))
_x = self
buff.write(_get_struct_Hd().pack(_x.age, _x.height))
except struct.error as se: self._check_types(struct.error("%s: '%s' when writing '%s'" % (type(se), str(se), str(locals().get('_x', self)))))
except TypeError as te: self._check_types(ValueError("%s: '%s' when writing '%s'" % (type(te), str(te), str(locals().get('_x', self)))))
def deserialize(self, str):
"""
unpack serialized message in str into this message instance
:param str: byte array of serialized message, ``str``
"""
try:
end = 0
start = end
end += 4
(length,) = _struct_I.unpack(str[start:end])
start = end
end += length
if python3:
self.name = str[start:end].decode('utf-8')
else:
self.name = str[start:end]
_x = self
start = end
end += 10
(_x.age, _x.height,) = _get_struct_Hd().unpack(str[start:end])
return self
except struct.error as e:
raise genpy.DeserializationError(e) #most likely buffer underfill
def serialize_numpy(self, buff, numpy):
"""
serialize message with numpy array types into buffer
:param buff: buffer, ``StringIO``
:param numpy: numpy python module
"""
try:
_x = self.name
length = len(_x)
if python3 or type(_x) == unicode:
_x = _x.encode('utf-8')
length = len(_x)
buff.write(struct.pack('%length, length, _x))
_x = self
buff.write(_get_struct_Hd().pack(_x.age, _x.height))
except struct.error as se: self._check_types(struct.error("%s: '%s' when writing '%s'" % (type(se), str(se), str(locals().get('_x', self)))))
except TypeError as te: self._check_types(ValueError("%s: '%s' when writing '%s'" % (type(te), str(te), str(locals().get('_x', self)))))
def deserialize_numpy(self, str, numpy):
"""
unpack serialized message in str into this message instance using numpy for array types
:param str: byte array of serialized message, ``str``
:param numpy: numpy python module
"""
try:
end = 0
start = end
end += 4
(length,) = _struct_I.unpack(str[start:end])
start = end
end += length
if python3:
self.name = str[start:end].decode('utf-8')
else:
self.name = str[start:end]
_x = self
start = end
end += 10
(_x.age, _x.height,) = _get_struct_Hd().unpack(str[start:end])
return self
except struct.error as e:
raise genpy.DeserializationError(e) #most likely buffer underfill
_struct_I = genpy.struct_I
def _get_struct_I():
global _struct_I
return _struct_I
_struct_Hd = None
def _get_struct_Hd():
global _struct_Hd
if _struct_Hd is None:
_struct_Hd = struct.Struct(")
return _struct_Hd
让给我们看看这个文件好像貌似是定义了一个类,可以看到他定义类的 slot 属性,用它来声明实例属性的列表,可以用来减少内存空间的目的。并且类的属性名和我们msg文件内容是一样的
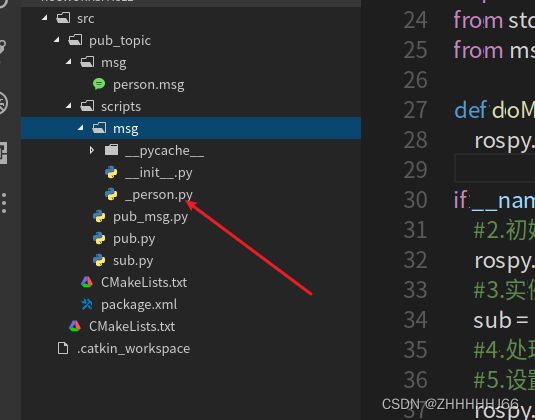
5.mgs生成的py文件的路径问题
从上面描述我们可以发现msg生成的python文件就是一个类,但他生成的路径我觉得是有点反人类的,所有我的解决方法是直接把python文件移到scripts这个文件夹里面去,这样我们不就可以直接用相对路径导入这个类了吗

6.代码实现
我们创建一个pub_msg.py文件
from msg._person import person
import rospy
if __name__ == "__main__":
rospy.init_node("junhao")
pub = rospy.Publisher("msg1",person, queue_size=10)
p = person()
p.name = "junhao"
p.age = 18
p.height = 1.95
rate = rospy.Rate(1)
while not rospy.is_shutdown():
pub.publish(p)
rospy.loginfo(f"发布的话题消息为:{p.name}-{p.age}-{p.height}")
rate.sleep()
对应的订阅者代码为sub_msg.py
#!/usr/bin/env python3
"""
需求: 实现基本的话题通信,一方发布数据,一方接收数据,
实现的关键点:
1.发送方
2.接收方
3.数据(此处为普通文本)
消息订阅方:
订阅话题并打印接收到的消息
实现流程:
1.导包
2.初始化 ROS 节点:命名(唯一)
3.实例化 订阅者 对象
4.处理订阅的消息(回调函数)
5.设置循环调用回调函数
"""
#1.导包
import rospy
from std_msgs.msg import String
from msg._person import person
def doMsg(msg):
rospy.loginfo(f"接受者收到的数据-{msg.name}-{msg.age}-{msg.height}")
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("listener_p")
#3.实例化 订阅者 对象
sub = rospy.Subscriber("msg1",person,doMsg,queue_size=10)
#4.处理订阅的消息(回调函数)
#5.设置循环调用回调函数
rospy.spin()
从发布者我们只是在
rospy.Publisher这个接口传入了person这个类,并实例化了一个对象传入了publish这个接口,而订阅者的代码是传入了话题名称,然后再回调函数中调用