opencv图像处理—图像特征:SIFT
目录
SIFT:Scale Invariant Feature Transform
图像尺度空间
多分辨率金字塔
高斯差分金字塔(DOG)
DOG空间极值检测
关键点的精确定位
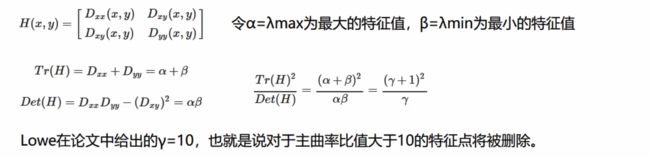
消除边界响应
特征点的主方向
生成特征描述
opencv SIFT函数
在pycharm中演示
出现错误1
正确演示
1.查询opencv 版本
2.代入演示
3.输出
SIFT:Scale Invariant Feature Transform
图像尺度空间
在一定的范围内,无论物体是大还是小,人眼都可以分辨出来,然而计算机要有相同的能力却很难,所以要让机器能够对物体在不同尺度下有一个统一的认知,就需要考虑图像在不同的尺度下都存在的特点。
尺度空间的获取通常使用高斯模糊来实现

 越大,图像偏离程度越大,图像越模糊
越大,图像偏离程度越大,图像越模糊

多分辨率金字塔
每一层都需要进行多个高斯滤波,比如第一层做了五个高斯滤波,第二层也是五个。

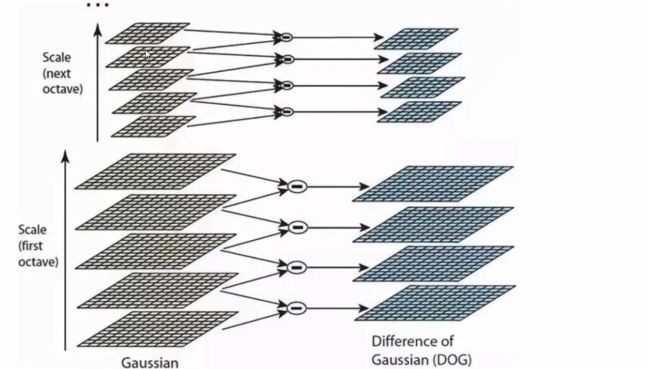
高斯差分金字塔(DOG)
区别不同的特点,需要看呈现出来不同的地方 。如:两个人,身高都是180cm,体重一个59kg,一个60kg;学习成绩一个5分,一个100分;所以身高区别不出来,体重也几乎区别不出来,但是学习成绩可以很好地区分开来两个人。
具体做法:每一层上进行的多次高斯滤波,其大小是一样的,如第一层做了五次高斯滤波,都是一样大的,可以执行减法操作即差分,五个模糊图像可以做出四个差分结果,每一层同理。差分完之后得到的是差异性结果,可以提取不同的特征点,然后使用向量代替。
提取特征点的时候,如前面两个人身高体重的例子,需要看哪个点的值比较大,哪里就是特征点。
DOG定义公式:
![]()
![]() :x,y表示具体的位置,表示高斯模糊参数
:x,y表示具体的位置,表示高斯模糊参数
后面式子表示:两种不同的高斯滤波相减与原图像相乘的结果与高斯模糊完之后的差分结果相同
DOG空间极值检测
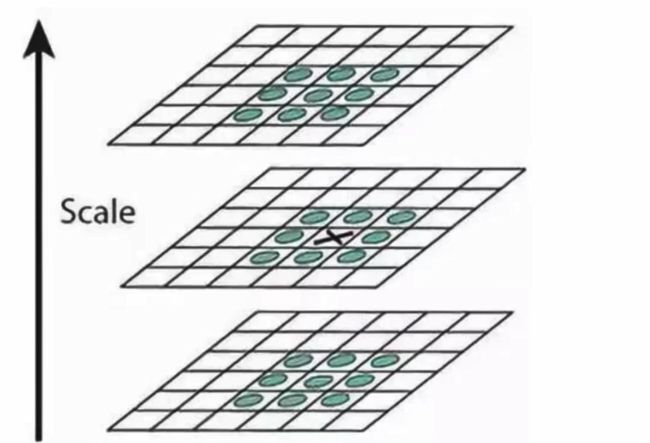
为了寻找尺度空间的极值点,每个像素点要和其图像阈(同一尺度空间)和尺度阈(相邻的尺度空间)的所有相邻点进行比较,当其大于(或者小于)所有相邻点时,该点就是极值点。如下图所示,中间的检测点要和其所在图像的3*3邻域8个像素点,以及其相邻的上下两层的3*3邻域18个像素点,共26个像素点进行比较。
最上面的一层与最下面的一层无法作比较
做一层检测需要三层DOG,需要四层高斯滤波模糊图像;做二层检测需要四层DOG,五层高斯滤波模糊图像
关键点的精确定位
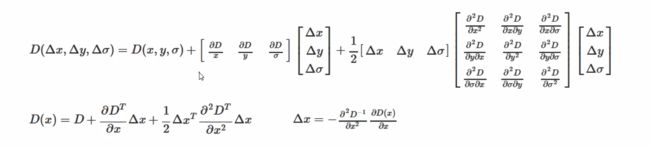
这些候选关键点是DOG空间的局部极值点,而且这些极值点均为离散的点,精确定位极值点的一种方法是,对尺度空间DOG函数进行曲线拟合,计算其极值点,从而实现关键点的精确定位。

消除边界响应
Hessian矩阵:
特征点的主方向

每个特征点可以得到三个信息(x,y,, )即位置、尺度和方向。具有多个方向的关键点可以被复制成多份,然后将方向值分别赋给复制后的特征点,一个特征点就产生了多个坐标、尺度相等,但是方向不同的特征点。
)即位置、尺度和方向。具有多个方向的关键点可以被复制成多份,然后将方向值分别赋给复制后的特征点,一个特征点就产生了多个坐标、尺度相等,但是方向不同的特征点。
生成特征描述
在完成关键点的梯度计算后,使用直方图统计领域内像素的梯度和方向。
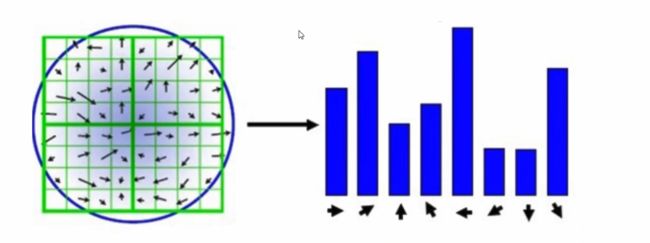
为了保证特征矢量的旋转不变性,要以特征点为中心,在领域内将坐标轴旋转角度,即将坐标轴旋转为特征点的主方向。

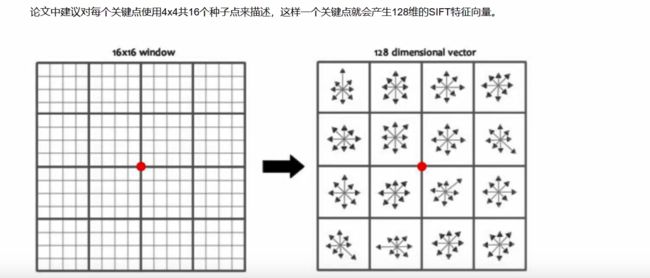
旋转之后的主方向为中心取8*8的窗口,求每个像素的梯度幅值和方向,箭头方向代表梯度方向,长度代表梯度幅值,然后利用高斯窗口对其进行加权运算,最后在每个4*4的小块上绘制8个方向的梯度直方图,计算每个梯度方向的累加值,即可形成一份种子点,即每个特征的由4个种子点组成,每个种子点有8个方向的向量信息。

opencv SIFT函数
完整代码:
import cv2
import numpy as np
img = cv2.imread('E:/OpenCV/image/lena.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow('gray',gray)
# pip install opencv-contrib-python==3.4.1.15
# pip install opencv-python==3.4.1.15(这个版本最稳定,往上的版本可能收取专利)
print(cv2.__version__)
# 得到特征点
sift = cv2.xfeatures2d.SIFT_create()
kp = sift.detect(gray, None) # 关键点
img = cv2.drawKeypoints(gray, kp, img)
cv2.imshow('drawKeypoints', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
# 计算特征
kp, des = sift.compute(gray, kp)
print(np.array(kp).shape)
print(des.shape)
print(des[0])
在pycharm中演示
出现错误1
运行如下代码时出错:
import cv2
import numpy as np
img=cv2.imread('E:/OpenCV/image/lena.jpg')
gray=cv2.cvtColor(img,cv2.COLOR_BGR2RGB)错误如下:
error: (-215:Assertion failed) !_src.empty() in function 'cv::cvtColor'

分析原因:
- 图片路径正确,且不含中文,但是图片路径不是全路径
- 图片路径不对,没有找到图片
- 图片路径中含有中文,函数报错
解决方法:
- 文件路径是否正确
- 是否是绝对路径(全路径)
- 文件名中是否含有中文
- 全路径中为
\\或/
正确演示
1.查询opencv 版本
3.4.1.15版本最稳定,往上可能会收取专利
代码:
import cv2
print(cv2.__version__)结论:

2.代入演示
代码:
import cv2
import numpy as np
img = cv2.imread('E:/OpenCV/image/lena.png')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
cv2.imshow('gray',gray)
# 得到特征点
sift = cv2.xfeatures2d.SIFT_create()
kp = sift.detect(gray, None) # 关键点
img = cv2.drawKeypoints(gray, kp, img)
cv2.imshow('drawKeypoints', img)
cv2.waitKey(0)
cv2.destroyAllWindows()结果:
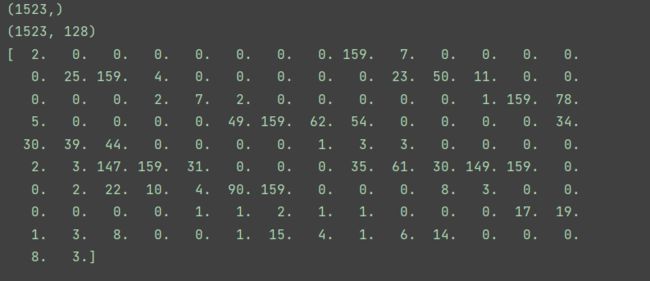
3.输出
代码:
print(np.array(kp).shape)
print(des.shape)
print(des[0])结果:128维的