深度优先搜索(DFS)和广度优先搜索(BFS)
深度优先搜索和广度优先搜索,都是图形搜索算法,它两相似,又却不同,在应用上也被用到不同的地方。这里拿一起讨论,方便比较。
先给大家说一下两者大概的区别:
-
如果搜索是以接近起始状态的程序依次扩展状态的,叫广度优先搜索。
如果扩展是首先扩展新产生的状态,则叫深度优先搜索。
深度优先搜索:对每一个可能的分支路径深入到不能再深入为止,而且每个结点只能访问一次。
广度优先搜索:又叫层次遍历,从上往下对每一层依次访问,在每一层中,从左往右(也可以从右往左)访问结点,访问完一层就进入下一层,直到没有结点可以访问为止。 -
二叉树的深度优先遍历的非递归的通用做法是采用栈,广度优先遍历的非递归的通用做法是采用队列。
-
通常
深度优先搜索法不全部保留结点,扩展完的结点从数据库中弹出删去,这样,一般在数据库中存储的结点数就是深度值,因此它占用空间较少。所以,当搜索树的结点较多,用其它方法易产生内存溢出时,深度优先搜索不失为一种有效的求解方法。
广度优先搜索算法,一般需存储产生的所有结点,占用的存储空间要比深度优先搜索大得多,因此,程序设计中,必须考虑溢出和节省内存空间的问题。但广度优先搜索法一般无回溯操作,即入栈和出栈的操作,所以运行速度比深度优先搜索要快些。
一、深度优先搜索
深度优先搜索属于图算法的一种,是一个针对图和树的遍历算法,英文缩写为DFS即Depth First Search。深度优先搜索是图论中的经典算法,利用深度优先搜索算法可以产生目标图的相应拓扑排序表,利用拓扑排序表可以方便的解决很多相关的图论问题,如最大路径问题等等。一般用栈stack数据结构来辅助实现DFS算法。其过程简要来说是对每一个可能的分支路径深入到不能再深入为止,而且每个节点只能访问一次。
若将bfs策略应用于树结构,其效果等同与前中后序遍历。
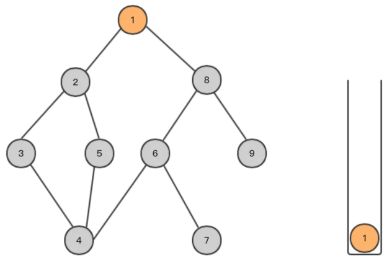
1.1 基本步骤
- 对于下面的树而言,DFS方法首先从根节点1开始,其搜索节点顺序是1,2,3,4,5,6,7,8(假定左分枝和右分枝中优先选择左分枝)。

- 从stack中访问栈顶的点;
- 找出与此点邻接的且尚未遍历的点,进行标记,然后放入stack中,依次进行;
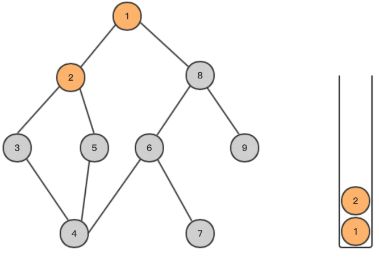
- 如果此点没有尚未遍历的邻接点,则将此点从stack中弹出,再按照(3)依次进行;
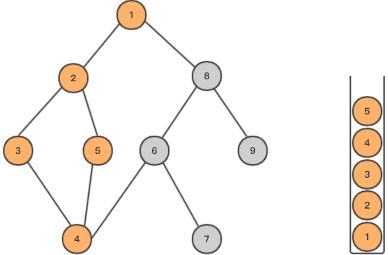

- 直到遍历完整个树,stack里的元素都将弹出,最后栈为空,DFS遍历完成。

1.2 代码模板
- 确认递归函数,参数
首先我们dfs函数一定要存一个图,用来遍历的,还要存一个目前我们遍历的节点,定义为x。至于单一路径,和路径集合可以放在全局变量,那么代码是这样的:
vector<vector<int>> result; // 收集符合条件的路径
vector<int> path; // 0节点到终点的路径
// x:目前遍历的节点
// graph:存当前的图
void dfs (vector<vector<int>>& graph, int x)
- 确认终止条件
什么时候我们就找到一条路径了?
当目前遍历的节点 为 最后一个节点的时候,就找到了一条,从 出发点到终止点的路径。
当前遍历的节点,我们定义为x,最后一点节点,就是 graph.size() - 1。
所以 但 x 等于 graph.size() - 1 的时候就找到一条有效路径。 代码如下:
// 要求从节点 0 到节点 n-1 的路径并输出,所以是 graph.size() - 1
if (x == graph.size() - 1) { // 找到符合条件的一条路径
result.push_back(path); // 收集有效路径
return;
}
- 处理目前搜索节点出发的路径
接下来是走 当前遍历节点x的下一个节点。
首先是要找到 x节点链接了哪些节点呢? 遍历方式是这样的:
for (int i = 0; i < graph[x].size(); i++) { // 遍历节点n链接的所有节点
接下来就是将 选中的x所连接的节点,加入到 单一路径来。
path.push_back(graph[x][i]); // 遍历到的节点加入到路径中来
- 当前遍历的节点就是 graph[x][i] 了,所以进入下一层递归
dfs(graph, graph[x][i]); // 进入下一层递归
- 最后就是回溯的过程,撤销本次添加节点的操作。 该过程代码:
for (int i = 0; i < graph[x].size(); i++) { // 遍历节点n链接的所有节点
path.push_back(graph[x][i]); // 遍历到的节点加入到路径中来
dfs(graph, graph[x][i]); // 进入下一层递归
path.pop_back(); // 回溯,撤销本节点
}
- 整体代码
// 深度优先搜索 C++代码模板
class Solution {
private:
vector<vector<int>> result; // 收集符合条件的路径
vector<int> path; // 0节点到终点的路径
// x:目前遍历的节点
// graph:存当前的图
void dfs (vector<vector<int>>& graph, int x, vector<bool>& used) {
// 要求从节点 0 到节点 n-1 的路径并输出,所以是 graph.size() - 1
if (x == graph.size() - 1) { // 找到符合条件的一条路径
result.push_back(path);
return;
}
unordered_set<int> visited; // 定义set对同一节点下的本层去重
for (int i = 0; i < graph[x].size(); i++) { // 遍历节点n链接的所有节点
// 要对同一树层使用过的元素进行跳过
if (visited.find(graph[x][i]) != visited.end()) { // 如果发现出现过就pass
continue;
}
visited.insert(graph[x][i]); //set跟新元素
path.push_back(graph[x][i]); // 遍历到的节点加入到路径中来
dfs(graph, graph[x][i]); // 进入下一层递归
path.pop_back(); // 回溯,撤销本节点
}
}
public:
vector<vector<int>> allPathsSourceTarget(vector<vector<int>>& graph) {
path.push_back(0); // 无论什么路径已经是从0节点出发
dfs(graph, 0); // 开始遍历
return result;
}
};
二、广度优先搜索
广度优先搜索(也称宽度优先搜索,缩写BFS即即Breadth First Search)是连通图的一种遍历算法。这一算法也是很多重要的图的算法的原型。Dijkstra单源最短路径算法和Prim最小生成树算法都采用了和广度优先搜索类似的思想。其属于一种盲目搜寻法,目的是系统地展开并检查图中的所有节点,以找寻结果。换句话说,它并不考虑结果的可能位置,彻底地搜索整张图,直到找到结果为止。基本过程,BFS是从根节点开始,沿着树(图)的宽度遍历树(图)的节点。
所采用的策略可概况为越早被访问到的顶点,其邻居顶点越早被访问。于是,从根顶点s的BFS搜索,将首先访问顶点s;再依次访问s所有尚未访问到的邻居;再按后者被访问的先后次序,逐个访问它们的邻居。一般用队列queue数据结构来辅助实现BFS算法。
若将bfs策略应用于树结构,其效果等同与层次遍历。
2.1 基本步骤
仿照树的层次遍历,借助队列来存储已访问过得顶点。
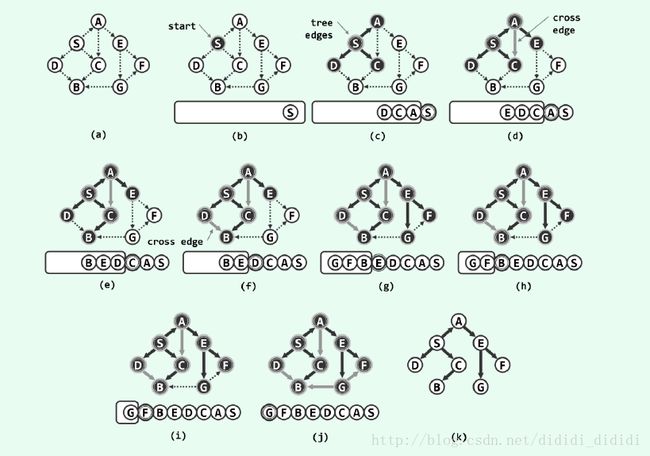
过程:先从图中选取一个顶点,作为遍历图的起始顶点,并加入队列中,然后依次访问该顶点的邻居顶点,并按照顺序加入队列中。 当访问了该顶点的所有邻居顶点后,把该顶点从队列中移除。接着获取新的队列头,访问该顶点的邻居顶点,最后以此类推,直到所有顶点被访问。
在遍历时,该顶点的邻居顶点有可能已经被访问过了,意味着边不属于遍历树,可将该边归类为跨边(cross edge)
下图给出一个8个顶点,11条边的有向图的BFS,始于顶点s
2.2 代码模板
void bfs() {
if(root==nullptr) return;
queue<TreeNode*> que;
queue.push(root);
unordered_set<int> visited; // 记录遍历过的节点
vector<vector<int>> result;
//开始遍历队列
while (!que.empty()) {
int size = que.size();
vector<int> vec;
// 这里一定要使用固定大小size,不要使用que.size(),因为que.size是不断变化的
for (int i = 0; i < size; i++) {
TreeNode* node = que.front();
que.pop();
if (visited.find(node) != visited.end()) { // 如果发现出现过就pass
continue;
}
visited.insert(node); //set跟新元素
vec.push_back(node->val);
if (node->left) que.push(node->left);
if (node->right) que.push(node->right);
}
result.push_back(vec);
}
}
三、例题
岛屿的最大面积

3.1 深搜+递归
class Solution {
public:
// DFS 用递归实现
int dfs(vector<vector<int>>& grid, vector<vector<bool>>& visited, int i, int j) {
// 终止条件
if(i<0 || j<0 || i>=grid.size() || j>=grid[0].size() || grid[i][j]==0 || visited[i][j]==true)
return 0;
visited[i][j]=true; // true为已遍历过
int area = 1;
vector<vector<int>> directions = {{1,0},{0,1},{-1,0},{0,-1}};
for(auto dir : directions) {
int next_i = i + dir[0];
int next_j = j + dir[1];
area += dfs(grid, visited, next_i, next_j);
}
return area;
}
int maxAreaOfIsland(vector<vector<int>>& grid) {
vector<vector<bool>> visited(grid.size(), vector<bool>(grid[0].size(), false)); //初始化全为false没被遍历过
int maxArea = 0;
for(int i=0; i<grid.size(); i++) {
for(int j=0; j<grid[0].size(); j++) {
if(grid[i][j]==1 && visited[i][j]==false)
maxArea = max(maxArea, dfs(grid, visited, i, j));
}
}
return maxArea;
}
};
3.2 广搜+迭代
class Solution {
public:
// BFS 用迭代实现
int dfs(vector<vector<int>>& grid, vector<vector<bool>>& visited, int i, int j) {
queue<pair<int, int>> que;
que.push({i, j});
visited[i][j]=true; // true为已遍历过
int area = 0;
while(!que.empty()) {
auto pos = que.front();
que.pop();
area++;
vector<vector<int>> directions = {{1,0},{0,1},{-1,0},{0,-1}};
for(auto dir : directions) {
int next_i = pos.first + dir[0];
int next_j = pos.second + dir[1];
if(next_i>=0 && next_i<grid.size() && next_j>=0 && next_j<grid[0].size() && grid[next_i][next_j]==1 && visited[next_i][next_j]==false) {
que.push({next_i, next_j});
visited[next_i][next_j] = true;
}
}
}
return area;
}
int maxAreaOfIsland(vector<vector<int>>& grid) {
vector<vector<bool>> visited(grid.size(), vector<bool>(grid[0].size(), false)); //初始化全为false没被遍历过
int maxArea = 0;
for(int i=0; i<grid.size(); i++) {
for(int j=0; j<grid[0].size(); j++) {
if(grid[i][j]==1 && visited[i][j]==false)
maxArea = max(maxArea, dfs(grid, visited, i, j));
}
}
return maxArea;
}
};
3.3 深搜+迭代
class Solution {
public:
int maxAreaOfIsland(vector<vector<int>>& grid) {
int ans = 0;
for (int i = 0; i != grid.size(); ++i) {
for (int j = 0; j != grid[0].size(); ++j) {
int cur = 0;
stack<int> stacki;
stack<int> stackj;
stacki.push(i);
stackj.push(j);
while (!stacki.empty()) {
int cur_i = stacki.top(), cur_j = stackj.top();
stacki.pop();
stackj.pop();
if (cur_i < 0 || cur_j < 0 || cur_i == grid.size() || cur_j == grid[0].size() || grid[cur_i][cur_j] != 1) {
continue;
}
++cur;
grid[cur_i][cur_j] = 0;
int di[4] = {0, 0, 1, -1};
int dj[4] = {1, -1, 0, 0};
for (int index = 0; index != 4; ++index) {
int next_i = cur_i + di[index], next_j = cur_j + dj[index];
stacki.push(next_i);
stackj.push(next_j);
}
}
ans = max(ans, cur);
}
}
return ans;
}
};