FCN源码解读之infer.py
转载自 https://blog.csdn.net/qq_21368481/article/details/80286809
infer.py是FCN中用于测试的python文件,每次可以单独测试一张图片在训练好的模型下的分割效果(直观上的以图片形式展示的分割效果)。
其源码如下:
-
import numpy
as np
-
from PIL
import Image
-
-
import caffe
-
import vis
-
-
# the demo image is "2007_000129" from PASCAL VOC
-
-
# load image, switch to BGR, subtract mean, and make dims C x H x W for Caffe
-
im = Image.open(
'demo/image.jpg')
-
in_ = np.array(im, dtype=np.float32)
-
in_ = in_[:,:,::
-1]
-
in_ -= np.array((
104.00698793,
116.66876762,
122.67891434))
-
in_ = in_.transpose((
2,
0,
1))
-
-
# load net
-
net = caffe.Net(
'voc-fcn8s/deploy.prototxt',
'voc-fcn8s/fcn8s-heavy-pascal.caffemodel', caffe.TEST)
-
# shape for input (data blob is N x C x H x W), set data
-
net.blobs[
'data'].reshape(
1, *in_.shape)
-
net.blobs[
'data'].data[...] = in_
-
# run net and take argmax for prediction
-
net.forward()
-
out = net.blobs[
'score'].data[
0].argmax(axis=
0)
-
-
# visualize segmentation in PASCAL VOC colors
-
voc_palette = vis.make_palette(
21)
-
out_im = Image.fromarray(vis.color_seg(out, voc_palette))
-
out_im.save(
'demo/output.png')
-
masked_im = Image.fromarray(vis.vis_seg(im, out, voc_palette))
-
masked_im.save(
'demo/visualization.jpg')
源码解读如下:
-
#coding=utf-8
-
import numpy
as np
-
from PIL
import Image
-
-
import caffe
-
import vis
#即vis.py文件
-
-
# the demo image is "2007_000129" from PASCAL VOC
-
-
# load image, switch to BGR, subtract mean, and make dims C x H x W for Caffe
-
im = Image.open(
'demo/image.jpg')
#可以自行替换相应的测试图片名
-
"""
-
以下部分和voc_layers.py中一样,也可参见https://blog.csdn.net/qq_21368481/article/details/80246028
-
- cast to float 转换为float型
-
- switch channels RGB -> BGR 交换通道位置,即R通道和B通道交换(感觉是用了opencv库的原因)
-
- subtract mean 减去均值
-
- transpose to channel x height x width order 将通道数放在前面(对应caffe数据存储的格式)
-
"""
-
in_ = np.array(im, dtype=np.float32)
-
in_ = in_[:,:,::
-1]
-
in_ -= np.array((
104.00698793,
116.66876762,
122.67891434))
-
in_ = in_.transpose((
2,
0,
1))
-
-
# load net 加载训练好的caffemodel
-
# deploy.prototxt为网络的构造文件;.caffemodel是训练好的模型文件(即参数信息);网络模式为test模式
-
net = caffe.Net(
'voc-fcn8s/deploy.prototxt',
'voc-fcn8s/fcn8s-heavy-pascal.caffemodel', caffe.TEST)
-
# shape for input (data blob is N x C x H x W), set data
-
net.blobs[
'data'].reshape(
1, *in_.shape)
#数字1表示测试图片为一张,即这里的第一维N=1
-
net.blobs[
'data'].data[...] = in_
-
# run net and take argmax for prediction
-
net.forward()
#前向计算
-
# 计算score层每一像素点的归属(像素归属于得分最高的那类)
-
out = net.blobs[
'score'].data[
0].argmax(axis=
0)
#
这里的axis=0表示第一维,而data[0]的大小表示C*H*W,也即argmax(axis=0)表示按C这一维进行取最大值,具体理解可看下面例子(注:caffe中的blob中的data是按N*C*H*W的数组存储的,即data[N][C][H][W],如果输入一张彩色图像大小为500*500,则data中的最后一个元素为data[0][2][499][499]):
-
import numpy
as np
-
a = np.array([[[
1,
2,
3],[
4,
5,
6]],[[
7,
8,
9],[
10,
11,
12]],[[
13,
14,
15],[
16,
17,
18]]])
-
b=np.max(a,axis=
0)
-
print(str(a))
-
print(str(b))
运行结果为:
-
[[[
1
2
3]
-
[
4
5
6]]
-
-
[[
7
8
9]
-
[
10
11
12]]
-
-
[[
13
14
15]
-
[
16
17
18]]]
-
[[
13
14
15]
-
[
16
17
18]]
从结果从可以看出b的维数为a的后两维,即2*3(a的维数为3*2*3),即np.max(a,axis=0)表示按a的第一维进行取最大值操作,如果修改为b=np.max(a,axis=1),则运行结果为:
-
[[[
1
2
3]
-
[
4
5
6]]
-
-
[[
7
8
9]
-
[
10
11
12]]
-
-
[[
13
14
15]
-
[
16
17
18]]]
-
[[
4
5
6]
-
[
10
11
12]
-
[
16
17
18]]
从结果中看出b的维数为3*3,即是按a的第二维进行取最大值操作,如果再修改为b=np.max(a,axis=2),则是按a的第三维进行取最大值操作,即b的维数应为3*2,结果如下:
-
[[[
1
2
3]
-
[
4
5
6]]
-
-
[[
7
8
9]
-
[
10
11
12]]
-
-
[[
13
14
15]
-
[
16
17
18]]]
-
[[
3
6]
-
[
9
12]
-
[
15
18]]
继续分析剩余代码如下
-
# visualize segmentation in PASCAL VOC colors 调用vis.py中的函数可视化分割结果
-
voc_palette = vis.make_palette(
21)
-
out_im = Image.fromarray(vis.color_seg(out, voc_palette))
-
out_im.save(
'demo/output.png')
#保存分割好的图像
-
masked_im = Image.fromarray(vis.vis_seg(im, out, voc_palette))
-
masked_im.save(
'demo/visualization.jpg')
#保存含有分割掩膜的原图
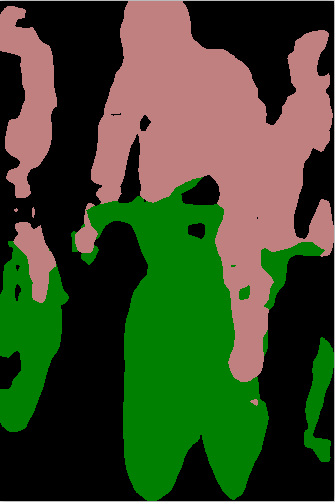
直观说明一下分割好的图像(左)与含有分割掩膜的原图(右)之间的区别,如下图所示: