STM32个人笔记--GPIO框图
笔记来源于STM32F103VET6,野火指南者,中文参考手册,HAL库开发手册和b站的野火指南者入门篇视频。观看过好多次入门篇了,但往往理解得不够全面,现记下小笔记,用来回顾。属于个人笔记,不用于商业。
目录
1.保护二极管及上、下拉电阻
编辑
2.P-MOS管和N-MOS管
先看MOS的基础知识。参考链接:
然后看推挽输出,下图是推挽输出的等效电路图。
再看开漏输出,下图是开漏输出的等效电路图。
总的来说,推挽输出模式一般应用在输出电平为 0 和 3.3 伏而且需要高速切换开关状态的场合。在 STM32 的应用中,除了必须用开漏模式的场合,我们都习惯使用推挽输出模式。开漏输出一般应用在 I2C、SMBUS 通讯等需要“线与”功能的总线电路中。除此之外,还用在电平不匹配的场合,如需要输出 5 伏的高电平,就可以在外部接一个上拉电阻,上拉电源为 5 伏,并且把 GPIO 设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外输出 5 伏的电平,如下图。
3.输出数据寄存器(ODR)
4.复用功能输出
5.输入数据寄存器(IDR)
6.复用功能输入
7.模拟输入输出

上图为GPIO框图,详细划分七个部分。
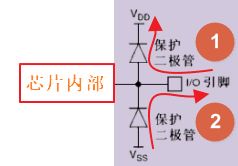
1.保护二极管及上、下拉电阻
引脚的两个保护二级管可以防止引脚外部过高或过低的电压输入。
当引脚电压高于 VDD 时,上方的二极管导通,如下图标志1箭头所示,IO引脚电压往VDD方向,没有直接进去芯片内部把内屏内部烧坏。
当引脚电压低于 VSS 时,下方的二极管导通,如下图标志2箭头所示,VSS往IO引脚电压方向,没有直接进去芯片内部把内屏内部烧坏。防止不正常电压引入芯片导致芯片烧毁。
尽管有这样的保护,并不意味着 STM32 的引脚能直接外接大功率驱动器件,这会导致保护二极管烧坏,就起不到保护作用了,直接流入芯片内部,把芯片烧坏。
如直接驱动电机,强制驱动要么电机不转,要么导致芯片烧坏,必须要加大功率及隔离电路驱动。
VCC表示模拟信号电源+(电压不限),GND表示模拟信号地-。
VDD表示数字信号电源+(一般为3.3V或5V),VSS表示数字电源地-。
2.P-MOS管和N-MOS管
GPIO 引脚线路经过两个保护二极管后,向上流向“输入模式”结构,向下流向“输出模式”结构。先看输出模式部分,线路经过一个由 P-MOS 和 N-MOS 管组成的单元电路。这个结构使 GPIO 具有了“推挽输出”和“开漏输出”两种模式。
先看MOS的基础知识。参考链接:
http://t.csdn.cn/30Mqv http://t.csdn.cn/30Mqv1)三个极的判定:
http://t.csdn.cn/30Mqv1)三个极的判定:
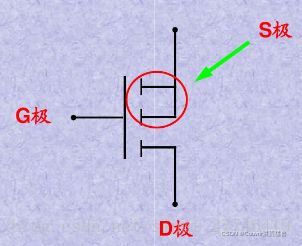
G极(gate)—栅极,不用说比较好认
S极(source)—源极,不论是P沟道还是N沟道,两根线相交的就是
D极(drain)—漏极,不论是P沟道还是N沟道,是单独引线的那边
2)N沟道和P沟道判别
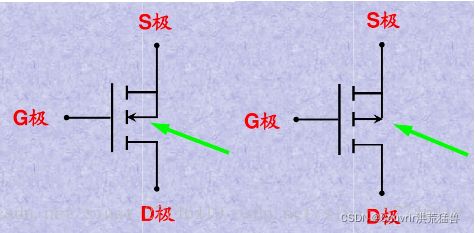
箭头指向G极的是N沟道
箭头背向G极的是P沟道
3)寄生二极管方向判定
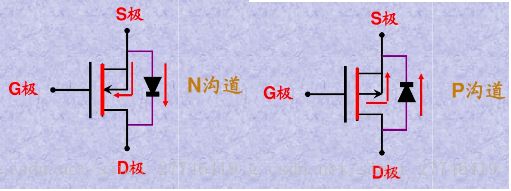
无论N沟道还是P沟道MOS管,中间衬底箭头方向和寄生二极管的箭头方向总是一致的:
要么都由S指向D,要么都有D指向S
然后看推挽输出,下图是推挽输出的等效电路图。
根据GPIO框图,输出数据寄存器作为INT输入,输出数据寄存器可输出0和1。
当输入1时,经过反相器后变为0,即G极为0。对于下方,Ug=Us,截止。对于上方,Us>Ug,导通。OUT对外输出1。
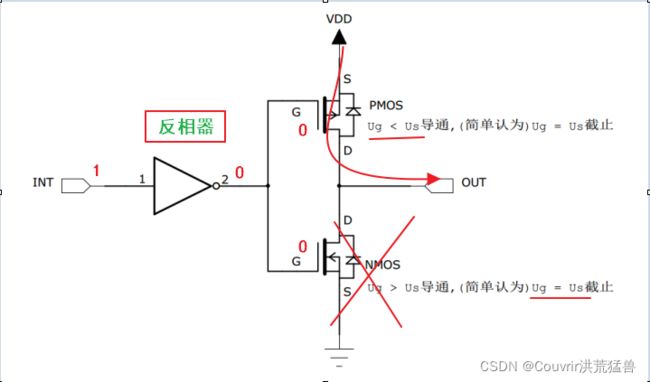
当输入0时,经过反相器后变为1,即G极为1。对于上方,Ug=Us,截止。对于下方,Ug>Us,导通。OUT对外输出0。
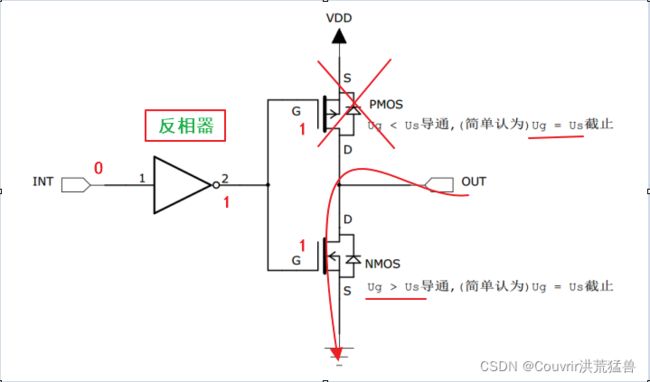
当引脚高低电平切换时,两个管子轮流导通,P 管负责灌电流(推),N 管负责拉电流(挽),使其负载能力和开关速度都比普通的方式有很大的提高。推挽输出的低电平为 0 伏,高电平为 3.3 伏。
再看开漏输出,下图是开漏输出的等效电路图。
开漏输出只能输出低电平。如果需要输出高电平,则需要外加上拉电阻。
在开漏输出模式时,上方的 P-MOS 管完全不工作。
当输入1时,经过反相器后变为0,即G极为0。对于上方,不工作,选择无视。对于下方,Ug=Us,截止。OUT悬空(既不输出高电平也不输出低电平),呈现高阻态。如果需要输出高电平,则需要外加上拉电阻。
当输入0时,经过反相器后变为1,即G极为1。对于上方,不工作,选择无视。对于下方,Ug>Us,导通。OUT对外输出0,即输出低电平。
它具有“线与”特性,也就是说,若有很多个开漏模式引脚连接到一起时,只有当所有引脚都输出高阻态,才由上拉电阻提供高电平,此高电平的电压为外部上拉电阻所接的电源的电压。若其中一个引脚为低电平,那线路就相当于短路接地,使得整条线路都为低电平,0 伏。
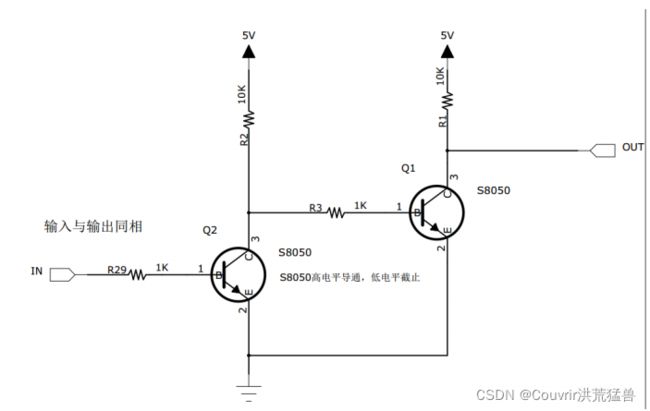
总的来说,推挽输出模式一般应用在输出电平为 0 和 3.3 伏而且需要高速切换开关状态的场合。在 STM32 的应用中,除了必须用开漏模式的场合,我们都习惯使用推挽输出模式。开漏输出一般应用在 I2C、SMBUS 通讯等需要“线与”功能的总线电路中。除此之外,还用在电平不匹配的场合,如需要输出 5 伏的高电平,就可以在外部接一个上拉电阻,上拉电源为 5 伏,并且把 GPIO 设置为开漏模式,当输出高阻态时,由上拉电阻和电源向外输出 5 伏的电平,如下图。
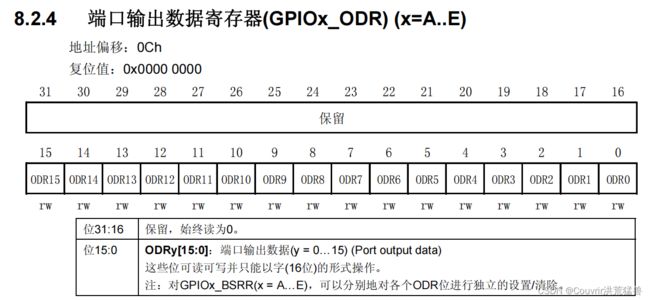
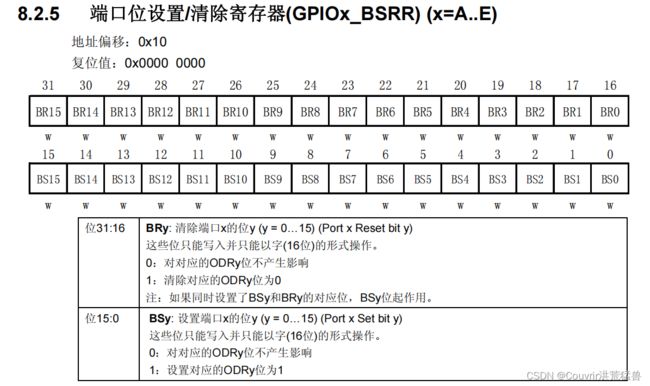
3.输出数据寄存器(ODR)
前面提到的双 MOS 管结构电路的输入信号,是由 GPIO“输出数据寄存器 GPIOx_ODR”提供的,因此我们通过修改输出数据寄存器的值就可以修改 GPIO 引脚的输出电平。而“置位/复位寄存器GPIOx_BSRR”可以通过修改输出数据寄存器的值从而影响电路的输出。根据STM32中文参考手册,有下图。
4.复用功能输出
“复用功能输出”中的“复用”是指 STM32 的其它片上外设对 GPIO 引脚进行控制,此时 GPIO 引脚用作该外设功能的一部分,算是第二用途。从其它外设引出来的“复用功能输出信号”与 GPIO本身的数据据寄存器都连接到双 MOS 管结构的输入中,通过图中的梯形结构作为开关切换选择。例如我们使用 USART 串口通讯时,需要用到某个 GPIO 引脚作为通讯发送引脚,这个时候就可以把该 GPIO 引脚配置成 USART 串口复用功能,由串口外设控制该引脚,发送数据。
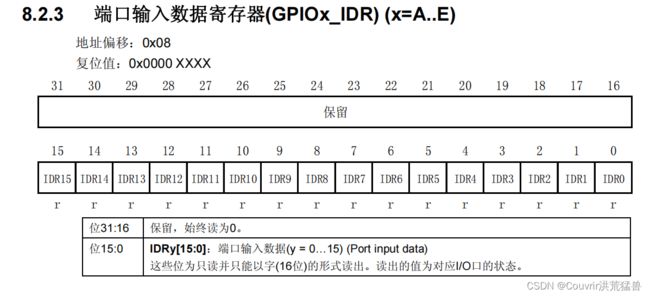
5.输入数据寄存器(IDR)
看 GPIO 结构框图的上半部分,GPIO 引脚经过内部的上、下拉电阻,可以配置成上/下拉输入,然后再连接到施密特触发器,信号经过触发器后,模拟信号转化为 0、1 的数字信号,然后存储在“输入数据寄存器 GPIOx_IDR”中,通过读取该寄存器就可以了解 GPIO 引脚的电平状态。
TTL肖特基触发器:也叫施密特触发器。大于2.0V时,输出高电平1;小于0.8V时,输出低电平0。信号经过触发器后,模拟信号转化为0和1的数字信号。但是,当GPIO引脚作为ADC采集电压的输入通道时,用其“模拟输入”功能,此时信号不再经过触发器进行TTL电平转换。ADC外设要采集到的原始的模拟信号。
TTL肖特基触发器也称施密特触发器,遵守TTL电平标准。
输出低电平L:<0.4 ; H>2.4
输入低电平L:<=0.8 ; H>=2.0
在室温下,一般输出高电平是3.5V,输出低电平是0.2V。
FT代表5V容忍。
6.复用功能输入
与“复用功能输出”模式类似,在“复用功能输入模式”时,GPIO 引脚的信号传输到 STM32 其它片上外设,由该外设读取引脚状态。同样,如我们使用 USART 串口通讯时,需要用到某个 GPIO 引脚作为通讯接收引脚,这个时候就可以把该 GPIO 引脚配置成 USART 串口复用功能,使 USART 可以通过该通讯引脚的接收远端数据。
7.模拟输入输出
当 GPIO 引脚用于 ADC 采集电压的输入通道时,用作“模拟输入”功能,此时信号是不经过施密特触发器的,因为经过施密特触发器后信号只有 0、1 两种状态,所以 ADC 外设要采集到原始的模拟信号,信号源输入必须在施密特触发器之前。类似地,当 GPIO 引脚用于 DAC 作为模拟电压输出通道时,此时作为“模拟输出”功能,DAC 的模拟信号输出就不经过双 MOS 管结构,模拟信号直接输出到引脚。
下面对GPIO初始化进行描述,例子为LED的R灯。
void LED_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//配置LED R时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
//配置LED R---PB5
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(LED_R_GPIO_PORT,&GPIO_InitStruct);
//关闭LED R
GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
再看看Key的初始化。
void KEY_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//配置KEY1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//配置KEY1-PA0
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStruct);
}然后,对于GPIO的结构体,有。
typedef struct
{
uint16_t GPIO_Pin; //IO引脚,这个参数可以是GPIO_pins_define的任意值
GPIOSpeed_TypeDef GPIO_Speed; //引脚速度,这个参数可以是GPIOSpeed_TypeDef的任意值
GPIOMode_TypeDef GPIO_Mode; //引脚工作模式, 这个参数可以是GPIOMode_TypeDef的任意值
}GPIO_InitTypeDef;对于GPIO结构体的GPIO_Pin,可选择
#define GPIO_Pin_0 ((uint16_t)0x0001) /*!< Pin 0 selected */
#define GPIO_Pin_1 ((uint16_t)0x0002) /*!< Pin 1 selected */
#define GPIO_Pin_2 ((uint16_t)0x0004) /*!< Pin 2 selected */
#define GPIO_Pin_3 ((uint16_t)0x0008) /*!< Pin 3 selected */
#define GPIO_Pin_4 ((uint16_t)0x0010) /*!< Pin 4 selected */
#define GPIO_Pin_5 ((uint16_t)0x0020) /*!< Pin 5 selected */
#define GPIO_Pin_6 ((uint16_t)0x0040) /*!< Pin 6 selected */
#define GPIO_Pin_7 ((uint16_t)0x0080) /*!< Pin 7 selected */
#define GPIO_Pin_8 ((uint16_t)0x0100) /*!< Pin 8 selected */
#define GPIO_Pin_9 ((uint16_t)0x0200) /*!< Pin 9 selected */
#define GPIO_Pin_10 ((uint16_t)0x0400) /*!< Pin 10 selected */
#define GPIO_Pin_11 ((uint16_t)0x0800) /*!< Pin 11 selected */
#define GPIO_Pin_12 ((uint16_t)0x1000) /*!< Pin 12 selected */
#define GPIO_Pin_13 ((uint16_t)0x2000) /*!< Pin 13 selected */
#define GPIO_Pin_14 ((uint16_t)0x4000) /*!< Pin 14 selected */
#define GPIO_Pin_15 ((uint16_t)0x8000) /*!< Pin 15 selected */
#define GPIO_Pin_All ((uint16_t)0xFFFF) /*!< All pins selected */对于GPIO结构体的GPIO_Speed,可选择
typedef enum
{
GPIO_Speed_10MHz = 1,
GPIO_Speed_2MHz,
GPIO_Speed_50MHz
}GPIOSpeed_TypeDef;对于GPIO结构体的GPIO_Mode,可选择
typedef enum
{ GPIO_Mode_AIN = 0x0, //模拟输入
GPIO_Mode_IN_FLOATING = 0x04, //浮空输入
GPIO_Mode_IPD = 0x28, //下拉输入
GPIO_Mode_IPU = 0x48, //上拉输入
GPIO_Mode_Out_OD = 0x14, //开漏输出
GPIO_Mode_Out_PP = 0x10, //推挽输出
GPIO_Mode_AF_OD = 0x1C, //开漏复用输出
GPIO_Mode_AF_PP = 0x18 //推挽复用输出
}GPIOMode_TypeDef;