OpenCV(C++)实现相机/图像的畸变校正
本次主要介绍一下相机的畸变以及如何获取相机的内参以及畸变系数,从而尽可能消除畸变的影响。
什么是畸变?
参考:单目摄像头标定与畸变矫正
图像校正
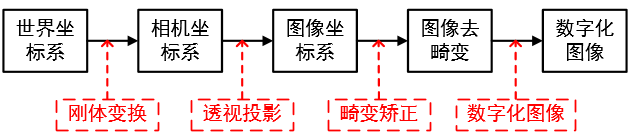
成像过程基本分为:物理坐标变换、投影变换、畸变矫正、像素变换
畸变校正的基本流程
1.采集标定板图像,大约十五张左右;
2.根据使用的标定板确定标定板的内点数,找出标定板的角点坐标
3.进一步提取亚像素角点信息;
4.计算并获取相机的内参矩阵和畸变系数;
5.畸变图像的校正修复
0.准备标定板
标定板可以直接从opencv官网上能下载到:
链接: 标定板.
然后直接打印出来即可。
得出标定板的内部行列交点个数:6*9——下面在求解相机参数和畸变系数时会用
1.采集标定板图像
附上代码:
#include "opencv2/opencv.hpp"
#include 获取的图像如下图所示:

2.直接上程序,通过库函数的解算,即可获得相机内参及畸变系数
代码如下:
// CheckerBoardDemo.cpp : 定义控制台应用程序的入口点。
//
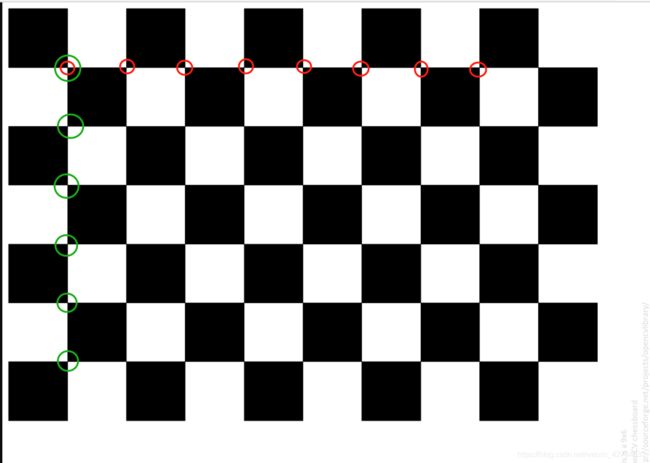
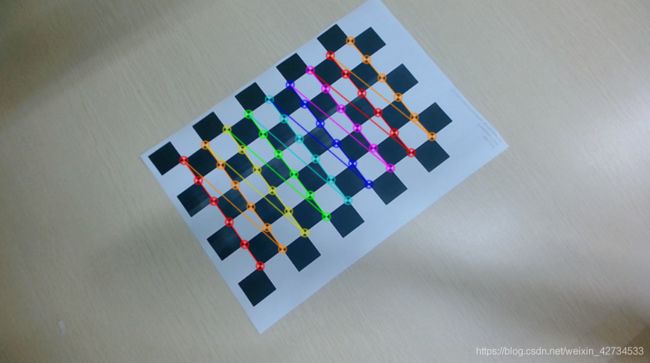
//#include 运行程序,每张图片都会检测角点,如下:
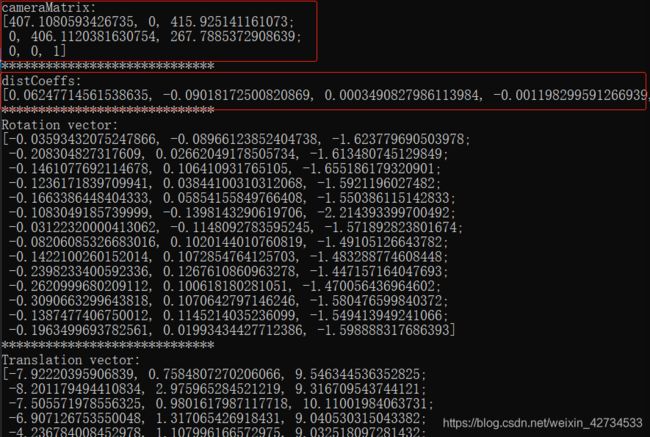
最终得到,相机内参及畸变系数:
测试畸变前后的图像,以图像2为例:

因此,我们使用的相机自身畸变问题并不突出,所以校正前后图像的变化基本不大。但对于畸变问题突出的相机,一般需要对其进行畸变校正后,方可使用。