#三维空间坐标系变换#__仅考虑yaw角(z轴)以及平移的坐标变换
#三维空间坐标系变换#__旋转(Z轴)
-
-
- 三维空间坐标系变换
- 仅考虑yaw角以及平移的坐标变换
-
三维空间坐标系变换
详细的分析过程见参考博客
仅考虑yaw角以及平移的坐标变换
应用场景是智能车辆中动态目标检测中运动补偿,t1 --> t2,在预测目标A状态时,先在t1坐标系下将A1预测到A2,然后再将A2从t1坐标系变换到t2坐标系,得到最终的结果,这里描述的是A2从t1坐标系变换到t2坐标系的过程,这里实现的是将t1到t2子车运动补偿到目标运动的运动状态中,如果子车的yaw角定义不一致,则可能补偿的变换矩阵可能不一致,详细如下所示:
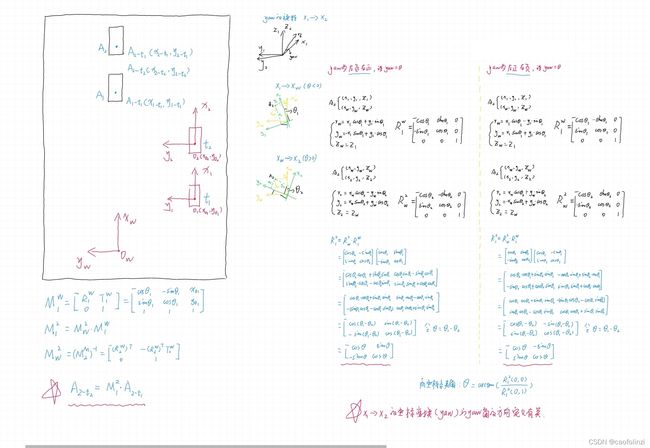
上图中坐标yaw角定义为左负右正时,最终旋转变换矩阵写错了,其中 s i n θ sin\theta sinθ改为 − s i n θ -sin\theta −sinθ, − s i n θ -sin\theta −sinθ改为 s i n θ sin\theta sinθ。