batch & print pro_图卷积网络(GCN) Mini-Batch技巧
引言
图卷积网络GCN取得了非常好的效果。
对于小型图,可以全部加载到内存中,每层Layer的卷积操作都会遍历全图。
对于中大型图,全部加载到内存的做法,显然不能满足需求。我们会使用mini-batch而不是全图来进行计算。
下面将介绍三种目前常见的Batch技巧,分别来自GraphSage和ScalableGCN。
1. GraphSage Batch技巧
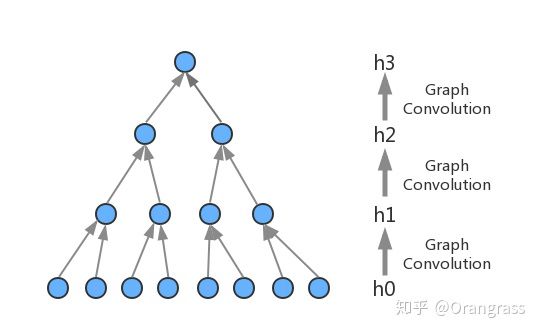
如上图所示,h0是模型inputs数据。3层图卷积Layers,分别是h1, h2, h3。
第k层
先通过AGGREGATE算子将邻居节点的embedding聚集起来,再和节点自身的embedding信息combine,用输出结果来更新自身embedding。

我们可以观察到,为了计算最后一层图卷积Layer h3的某个点的embedding,只需要h3->h2->h1->h0中涉及到的点(上图中蓝色的点)。相对于全部的点(灰色+蓝色的点),这个计算范围已经大大缩小了。考虑到有些点可能关联非常多的邻接点,如果使用全部邻接点来计算AGGREGATE,那么计算复杂度将会不可控。
为了解决这个问题,GrapheSage提出抽样邻接点的方法。模型限制每个节点抽样邻接点的数量m,m是一个可配置的超参数。如果m值越大,那么模型计算越准确,但是计算代价也越大。反之m值越小,模型计算越不准确,但是计算代价也越小。
具体采样的方式是:
- 当邻接点数量小于m时,通过重复采样的方式补齐到m个
- 当邻接点数量大于m时,从中随机抽取m个
GraphSage采取Uniform采样方式,是基于所有邻接点的重要性是一样的假设。这个假设在很多实际问题中是不成立的,之后的论文里通过使用Importance Sampling或者引入Attention机制来进行优化。
使用邻接点数为m的采样之后,对于L层的图卷积网络,一个mini-batch中就只会涉及到
2. ScalableGCN Batch技巧
ScalableGCN是阿里妈妈提出的一种在大规模图上加速Mini-batch GCN训练速度方法。这个方法也包含在最近开源的大规模分布式图学习框架Euler里面。
ScalableGCN的官方介绍链接是
alibaba/eulergithub.com
这个wiki里面方法介绍的比较粗略,下面我会结合实现代码细节,具体介绍ScalableGCN算法。

在第一部分里面,我们介绍了GraphSage采用的batch方式,虽然相比于全图计算,已经将计算量大幅减少,但是可以看到它的复杂度还是和卷积层数L成指数级关系。
在图1中低阶的embedding(比如h0, h1, h2)会在计算不同点的高阶embedding(h3)时,被大量重复使用。如果我们把这部分低阶的embedding缓存起来,就可以减少除了自己节点计算以外,其他邻接点的计算。
具体地,对于
即在汇聚的时候使用缓存中的embedding值,这样一来我们只需计算mini-batch中的样本顶点的卷积结果,无需对扩散后的
self源码中使用trainable=False的tf variable来存储前
for 当顶层node_embedding计算更新之后,我们用这个更新之后的embedding值来更新stores里面对应节点的缓存。
下面介绍模型的反向求导过程
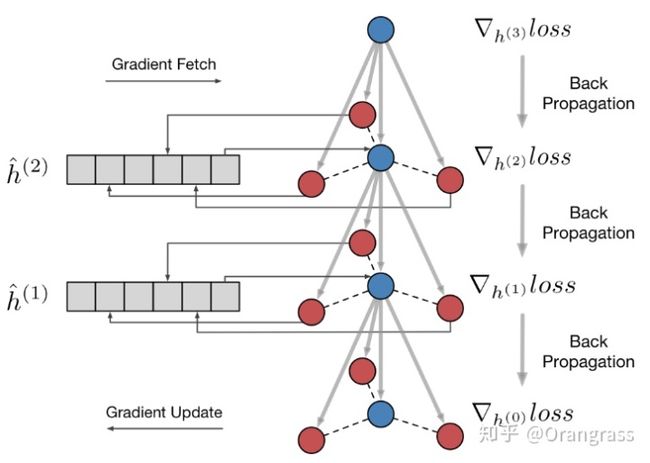
我们开辟存储空间:
self类似的源码中使用trainable=False的tf variable来存储这部分导数。
因为前
for 下面我们需要通过Back-Propagation来更新模型参数
如果没有因为缓存数据结构,更新模型参数很简单,只需要执行optimizer.minimize(loss),tensorflow就会自动更新参数
但是这里我们为了避免重复计算引入了缓存结构(trainable=False的variable),这些variable的导数是我们手动掉tf.gradient接口计算出来的。根据链式求导法则
其中
def