Useful Policy Invariant Shaping from Arbitrary Advice论文翻译导读分析
这是
摘要
强化学习(RL)是一种强大的学习范式,在该范式中,agent可以学习最大化稀疏和延迟的奖励信号。尽管RL在复杂领域取得了许多令人印象深刻的成功,但学习可能需要数小时、数天甚至数年的训练数据。当代RL研究的一个主要挑战是发现如何用更少的数据学习。以前的工作表明,域信息可以成功地用于塑形奖励;通过添加额外的奖励信息,agent可以用更少的数据学习。此外,如果奖励是由一个势能函数构造的,则最优策略保证不变。虽然这种基于势能的奖励塑形(PBRS)有希望,但它受到对一个明确定义的势能函数的需求的限制。理想情况下,我们希望能够采纳来自人或其他agent的任意建议,并在不影响最优策略的情况下提高性能。最近提出的基于动态势能的建议(dynamic potential based advice,DPBA)方法通过接受来自人或其他agent的任意建议来解决这一问题,并在不影响最优策略的情况下提高性能。本文的主要贡献是从理论和经验上揭示了 DPBA 的一个缺陷。或者,为了实现理想目标,我们提出了一种称为策略不变显式塑形 (policy invariant explicit shaping,PIES) 的简单方法,并从理论上和经验上证明 PIES 在 DPBA 失败的地方成功。
1. INTRODUCTION
----强化学习(RL)agent旨在学习最大化奖励信号的策略(然而,最大化的奖励信号并不一定是正确的策略,因为agent可能会刷分,也就是 reward hacking)(从状态到动作的映射)[17]。在许多情况下,奖励信号是稀疏和延迟的,因此学习一个好的策略可能需要很长时间。例如,Open AI Five agent[13]每天训练需要180年的游戏经验;同样,大师级星际争霸特工Alpha Star[18]需要16000场比赛作为训练数据。一种加速学习的方法是添加外部建议(advice)。为 RL agent提供额外奖励以改善学习的做法称为奖励塑形,额外奖励称为塑形奖励。然而,天真地增加原来的奖励函数与塑形可能会改变 RL agent的最优策略[15]。例如,Randløv 和 Alstrøm [15]表明,增加一个塑形奖励(一开始看起来是合理的)会导致一个机构学习如何骑自行车朝目标前进,而不是“分心”,骑在一个循环,反复收集塑形奖励。
----基于势能的奖励塑形(Potential based reward shaping,PBRS)[12,19,20]允许 RL agent通过从势能函数获得塑形奖励,在不改变其最优策略的情况下纳入外部建议。给定一个静态势函数,PBRS 将塑形奖励定义为当agent从一个状态转换到另一个状态时状态(或状态-行动对)的势能差。Ng 等[12]证明了 PBRS 是保证策略不变的: 使用 PBRS 不会改变最优策略。
----虽然PBRS实现了策略不变性,但个人或agent可能很难或不可能将其建议表达为基于势能的函数。相反,最好允许以任意函数的形式使用更直接或更直观的建议。那么,理想的奖励塑形方法将具有三个特性:
- 能够使用任意的奖励函数作为建议,
- 在附加建议存在的情况下保持最优策略不变,
- 当建议是好的时候提高 RL agent的学习速度。
----Harutyunyan等人[8]试图通过提出基于动态势能的建议(dynamic potential-based advice ,DPBA)框架来解决同样的问题,其中的想法是从任意建议中动态学习势能函数,然后可以使用该函数来定义塑形奖励。重要的是,作者声称,如果将势能函数初始化为零,则DPBA保证是策略不变的。我们在这项工作中表明,这一说法是不正确的,因此,不幸的是,该方法不是策略不变的。我们从理论和经验上证实了我们的发现。然后,我们通过导出校正项来对该方法进行修正,并表明该结果在理论上是正确的,并且在经验上是不变的。然而,我们的实证分析表明,修正后的DPBA不能加速提供有用建议的RL agent的学习。
我们介绍了一种简单的算法——策略不变显式塑形(policy invariant explicit shaping,PIES) ,证明了 PIES 能够支持任意的建议,具有策略不变性,并且能够加速 RL agent的学习。在学习开始时,当agent最需要指导时,PIES 会使agent的策略偏向于建议。随着时间的推移,PIES 会逐渐将这种偏差降低到零,从而确保策略的不变性。若干实验证实,当建议具有误导性时,PIES 能确保收敛到最优策略,当建议有用时,PIES 还能加速学习。
具体而言,本文作出了以下贡献:
- (1) 识别已发布的奖励塑形方法中的一个重要缺陷。
- (2) 从经验和理论上验证缺陷的存在。
- (3) 对该方法进行了修正,但经验表明,它引入了额外的复杂性,好的建议不再提高学习速度。
- (4) 介绍并验证了一种实现原始方法目标的简单方法。
2. BACKGROUND
----马尔可夫决策过程(MDP)[14]由元组描述 ⟨ S , A , T , γ , R ⟩ ⟨S, A, T, γ, R⟩ ⟨S,A,T,γ,R⟩. 在每个时间步,环境都处于状态s∈S,agent采取行动a∈A,环境根据转移概率 T ( s , a , s ′ ) = P r ( s ′ ∣ s , a ) T(s,a,s^{′})=Pr(s^{′}|s, a) T(s,a,s′)=Pr(s′∣s,a)转变到新的状态 s ′ ∈ S s^{′}∈ S s′∈S。此外,agent(在每个时间步)根据奖励函数 R ( s , a ) R(s, a) R(s,a)接收在状态s中采取动作a的奖励。最后, γ γ γ是折扣因子,指定如何权衡未来奖励和当前奖励。
----确定性策略 π π π是从状态到动作的映射, π : S → A π:S→A π:S→A,也就是说,对于每个状态 s s s, π ( s ) π(s) π(s)返回一个动作 a = π ( s ) a=π(s) a=π(s)。状态-动作价值函数 Q π ( s , a ) Q_{π}(s, a) Qπ(s,a)定义为智能体在状态 s 中采取动作 a a a 并随后遵循策略 π π π将获得的折扣奖励的预期总和。

agent旨在找到由 π ∗ π^{∗} π∗表示的最优策略,它使折扣奖励的期望总和最大化,与 π ∗ π^{∗} π∗ 相关的状态-动作值函数称为最优状态-动作值函数,记为 Q ∗ ( s , a ) Q^{∗}(s, a) Q∗(s,a):
-------------------------------- Q ∗ ( s , a ) = max π ∈ Π Q π ( s , a ) Q^{*}(s,a)=\max_{\pi \in \Pi } Q^{\pi}(s,a) Q∗(s,a)=maxπ∈ΠQπ(s,a)
其中, Π \Pi Π是所有策略的空间。
给定策略 π π π 的动作价值函数满足贝尔曼方程:
--------------------------------- Q π ( s , a ) = R ( s , a ) + γ Σ s ′ , a ′ [ Q π ( s ′ , a ′ ) ] Q^{\pi }(s,a)=R(s,a)+\gamma \Sigma _{s^{′},a^{′}}[Q^{\pi }(s^{′},a^{′})] Qπ(s,a)=R(s,a)+γΣs′,a′[Qπ(s′,a′)]
其中 s ′ s^{′} s′ 是下一个时间步的状态, a ′ a^{′} a′ 是agent在下一个时间步采取的动作,这对所有策略都是正确的。
最优策略 π ∗ π^{∗} π∗的贝尔曼方程称为贝尔曼最优方程:
--------------------------- Q ∗ ( s , a ) = R ( s , a ) + γ Σ s ′ , a ′ [ Q ∗ ( s ′ , a ′ ) ] Q^{*}(s,a)=R(s,a)+\gamma \Sigma _{s^{′},a^{′}}[Q^{*}(s^{′},a^{′})] Q∗(s,a)=R(s,a)+γΣs′,a′[Q∗(s′,a′)]
给定最优值函数 π ∗ ( s , a ) π^{∗}(s, a) π∗(s,a),agent可以通过对最优值函数的贪婪行动来检索最优策略:
----------------------------- π ∗ ( s , a ) = max a ∈ A Q ∗ ( s , a ) π^{∗}(s, a)=\max_{a \in A } Q^{*}(s,a) π∗(s,a)=maxa∈AQ∗(s,a)
许多强化学习算法背后的想法是迭代地学习最优值函数 Q ∗ Q^{*} Q∗。 例如,Sarsa [17] 在每个时间步 t t t使用以下更新规则学习 Q Q Q 值( Q 0 Q_{0} Q0 可以任意初始化):
-------------------------------- Q t + 1 ( s t , a t ) = Q t ( s t , a t ) + α t δ t Q_{t+1}(s_{t},a_{t})=Q_{t}(s_{t},a_{t})+\alpha _{t}\delta _{t} Qt+1(st,at)=Qt(st,at)+αtδt ------------------------------(1)
其中,
--------------------------- δ t = R t ( s t , a t ) + γ Q t ( s t + 1 , a t + 1 ) − Q t ( s t , a t ) \delta _{t}=R_{t}(s_{t},a_{t})+\gamma Q_{t}(s_{t+1},a_{t+1})-Q_{t}(s_{t},a_{t}) δt=Rt(st,at)+γQt(st+1,at+1)−Qt(st,at)
是时间差误差(TD-error), s t s_{t} st和 a t a_{t} at 表示时间步 t t t 的状态和动作, Q t Q_{t} Qt 表示时间步 t t t 对 Q ∗ Q^{∗} Q∗ 的估计, α t α_{t} αt是时间步 t t t的学习率。在某些条件下,保证这些 Q Q Q 估计对于所有 s s s, a a a 收敛到 Q ∗ Q^{∗} Q∗,并且策略会收敛到 Q ∗ Q^{∗} Q∗ [17]。
PS:sarsa算法伪代码

2.1 Potential-Based Reward Shaping
----在奖励稀疏的情况下,奖励塑形可以通过提供额外的塑形奖励F来帮助agent更快地学习。然而,添加任意奖励可能会改变给定MDP的最优策略[15]。基于势能的奖励塑形 (Potential-based reward shaping,PBRS) 解决了将塑形奖励函数 F F F 添加到现有 MDP 奖励函数R的问题,而无需通过将 F F F定义为当前状态 s s s 和下一个状态 s ′ s^{′} s′的势能之差来更改最优策略[12]。具体而言,PBRS将塑形奖励限制为以下形式: F ( s , s ′ ) : = γ Φ ( s ′ ) − Φ ( s ) F(s, s^{′}):=γΦ(s^{′})−Φ(s) F(s,s′):=γΦ(s′)−Φ(s),其中 Φ : s → R Φ:s→R Φ:s→R是势函数。Ng等人[12]表明,将 F F F表示为势差是agent策略不变的充分条件。也就是说,如果原始MDP ⟨ S , A , T , γ , R ⟩ ⟨S, A, T, γ, R⟩ ⟨S,A,T,γ,R⟩ 表示为 M M M,塑形MDP ⟨ S , A , T , γ , R + F ⟩ ⟨S, A, T, γ, R+F⟩ ⟨S,A,T,γ,R+F⟩ 表示为 M ′ M^{′} M′ ( M ′ M^{′} M′与 M M M相同,但除了 R R R之外,还为agent提供了额外的奖励F),则 M M M和 M ′ M^{′} M′对于任何状态-动作对 ( s , a ) (s, a) (s,a)的最优值函数满足:
------------------------------------------- Q M ′ ∗ = Q M ∗ − Φ ( s ) Q_{M'}^{*}=Q_{M}^{*}-\Phi (s) QM′∗=QM∗−Φ(s)
其中 Φ Φ Φ是偏置项。鉴于 Q M ′ ∗ Q_{M'}^{*} QM′∗, 最优策略 π ∗ π^{∗} π∗ 可以简单地通过将偏置项相加为:
----------------------------- π ∗ ( s , a ) = a r g max a ∈ A Q M ∗ ( s , a ) = a r g max a ∈ A ( Q M ′ ∗ ( s , a ) + Φ ( s ) ) π^{∗}(s, a)=arg\max_{a \in A } Q_{M}^{*}(s,a)=arg\max_{a \in A } (Q_{M'}^{*}(s,a)+Φ(s)) π∗(s,a)=argmaxa∈AQM∗(s,a)=argmaxa∈A(QM′∗(s,a)+Φ(s))
由于偏差项仅取决于代理的状态,因此塑形MDP M′的最优策略与原始MDP M的最优策略没有区别。为了还包括对动作的塑形奖励,Wiewiora等人[20]将 F F F的定义扩展为状态动作对,将 F F F定义为: F ( s , a , s ′ , a ′ ) : = γ Φ ( s ′ , a ′ ) − Φ ( s , a ) F(s,a,s^{′},a^{′}):=γΦ(s^{′},a^{′})-Φ(s,a) F(s,a,s′,a′):=γΦ(s′,a′)−Φ(s,a) ,其中 Φ Φ Φ取决于agent状态和动作。现在,偏差项也取决于在状态 s s s下采取的行动,因此,为了成为策略不变量, agent必须遵守策略
----------------------------- π ∗ ( s , a ) = a r g max a ∈ A ( Q M ′ ∗ ( s , a ) + Φ ( s ) ) π^{∗}(s, a)=arg\max_{a \in A } (Q_{M'}^{*}(s,a)+Φ(s)) π∗(s,a)=argmaxa∈A(QM′∗(s,a)+Φ(s))
2.2 Dynamic Potential-Based Shaping
----如第 2.1 节所述,PBRS 仅限于可以用势能函数表示的外部建议。因此,它不满足三个目标中的第一个; 即,它不能接受任意建议。寻找一个准确捕捉建议的势能函数 Φ Φ Φ 可能具有挑战性。为了允许专家指定任意函数 R e x p e r t R^{expert} Rexpert 并且仍然保持 PBRS 的所有属性,可以考虑动态 PBRS。
----动态PBRS使用可在线改变的势函数Φt来形成动态塑形奖励 F t F_{t} Ft,其中下标 t t t表示 F F F和 Φ Φ Φ变化的时间。Devlin和Kudenko[5]使用动态PBRS作为 F t + 1 ( s , s ′ ) : = γ Φ t + 1 ( s ′ ) − Φ t ( s ) F_{t+1}(s, s^{′}):=γΦ_{t+1}(s^{′})−Φ_{t}(s) Ft+1(s,s′):=γΦt+1(s′)−Φt(s),其中 t t t和 t + 1 t+1 t+1分别是agent到达状态 s s s和 s ′ s^{′} s′的时间。他们为动态PBRS导出了与静态PBRS相同的策略不变性保证。为了承认一个任意的奖励,Harutyunyan等人[8]提出学习一个动态势函数 Φ t Φ_{t} Φt,给出一个任意有界函数 R e x p e r t R^{expert} Rexpert 形式的外部建议。为此,提出了以下名为基于动态势的建议(DPBA)的方法:定义 R Φ : = R e x p e r t R^{Φ}:= R^{expert} RΦ:=Rexpert,并在每个时间步通过以下更新规则学习二次值函数 Φ Φ Φ:
---------------- Φ t + 1 ( s , a ) : = Φ t ( s , a ) + β δ t Φ Φ_{t+1}(s,a):=Φ_{t}(s,a)+\beta \delta _{t}^{\Phi } Φt+1(s,a):=Φt(s,a)+βδtΦ-------------------(2)
其中 Φ t ( s , a ) Φ_{t}(s, a) Φt(s,a)是 Φ Φ Φ的当前估计, β β β是 Φ Φ Φ函数的学习率,以及
---------------- δ t Φ = R Φ ( s , a ) + γ Φ t + 1 ( s ′ , a ′ ) − Φ t ( s , a ) \delta _{t}^{\Phi }=R^{\Phi}(s,a)+γΦ_{t+1}(s^{′},a^{′})−Φ_{t}(s,a) δtΦ=RΦ(s,a)+γΦt+1(s′,a′)−Φt(s,a)
是 Φ Φ Φ函数的TD误差。一直以来,agent使用Sarsa学习 Q Q Q值(即,根据等式1)。除了原始奖励 R ( s , a ) R(s, a) R(s,a)之外,agent还接收塑形奖励,其给出如下:
----------------------------------------- F t + 1 ( s , a , s ′ , a ′ ) : = Φ t + 1 ( s ′ , a ′ ) − Φ t ( s , a ) F_{t+1}(s,a,s^{′},a^{′}):=Φ_{t+1}(s^{′},a^{′})−Φ_{t}(s,a) Ft+1(s,a,s′,a′):=Φt+1(s′,a′)−Φt(s,a)-----------------(3)
也就是说,连续更新的 Φ Φ Φ 值之间的差。
Harutyunyan等人[8]建议,通过这种形式的奖励塑形,对于每个 s s s和 a a a , Q M ∗ ( s , a ) = Q M ′ ∗ ( s , a ) + Φ 0 ( s , a ) Q_{M}^{*}(s,a)= Q_{M'}^{*}(s,a)+Φ_{0}(s,a) QM∗(s,a)=QM′∗(s,a)+Φ0(s,a),因此获得最优策略 π ∗ π^{∗} π∗, agent应根据以下规则对 Q M ′ ∗ ( s , a ) + Φ 0 ( s , a ) Q_{M'}^{*}(s,a)+Φ_{0}(s,a) QM′∗(s,a)+Φ0(s,a)使用贪婪策略提取动作:
![]()
因此,如果 Φ 0 ( s , a ) Φ_{0}(s, a) Φ0(s,a)被初始化为零,则等式4中的上述有偏策略将减少为原始的贪婪策略:

----DPBA在两个情景任务上进行了经验评估:一个20×20网格世界和一个推车杆问题。在网格世界实验中,agent从左上角开始每一集,直到到达位于右下角的目标,最多10000步。agent可以沿着四个基本方向移动,状态是agent的坐标 ( s , a ) (s, a) (s,a)。到达目标状态时奖励函数为+1,其他位置为0。任何状态-行动的建议 R e x p e r t R^{expert} Rexpert是:
----本文在我们后面的实验中复制了相同的网格世界环境。
----在车杆任务[11]中,目标是尽可能长地平衡车顶上的一根杆子。购物车可以沿着轨道移动,每一集都从轨道中间开始,杆子竖直。有两种可能的操作: 对购物车施加 1或 -1的力。这种状态由一个四维连续向量组成,表示杆子的角度和角速度,以及推车的位置和速度。当杆子平衡了200步或者杆子倒下时,一集就结束了,奖励函数鼓励agent人平衡杆子。
----为了复制这个实验2,本文使用了OpenAI健身房[2]实现(cartpole-v0)3。这个任务的建议定义为:
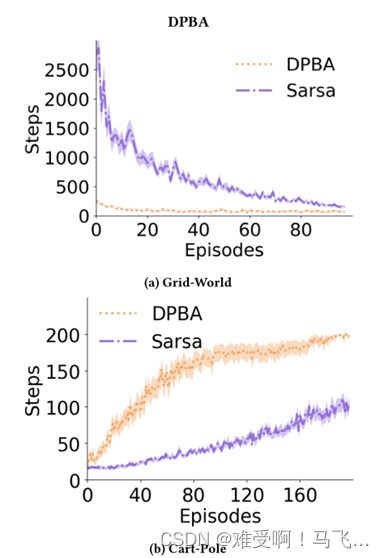
图1:y轴显示了在(a)50次和(b)30次跑步中平均完成每集(在x轴上)所用的时间步数。在a)网格世界和b)车极域中,将具有DPBA的成形agent与没有成形的Sarsa学习器进行比较。阴影区域对应于标准误差。
其中 o : S × A → 0 , 1 o:S×A→{0,1} o:S×A→0,1是一个函数,当杆方向与施加到推车上的力对齐时触发(即,当推车在杆倾斜的方向上移动时,agent将获得奖励)。我们设置 c = 0.1 c=0.1 c=0.1。
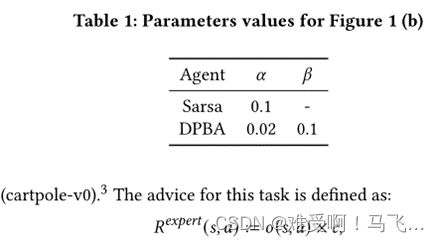
----图1显示了DPBA方法的性能,与没有收到任何专家建议的简单Sarsa学习器相比,DPBA方法在网格世界和推车杆域中的性能。我们使用了与[8]中用于网格世界相同的一组超参数。为了学习cart-pole任务,agent使用线性函数近似,通过Sarsa(λ)和瓦片编码特征表示[16]估计值函数,并使用开源软件(可在Richard Suttons的网站上公开)实现。Q和Φ的权重在0和0.001之间均匀随机初始化。对于瓦片编码,我们使用8个瓦片,每个瓦片有24个瓦片(每个维度2个)。为了更精确的状态表示,我们使用了一个包裹瓦片来表示极的角度。使用包裹瓦片,可以在一个范围内(例如[0, 2π])进行概括,而不是将瓦片拉伸到无穷大,然后再包裹。λ设置为0.9,γ设置为1。对于Q和Φ值函数α和β的学习率,我们扫描了这些值[0.001, 0.002, 0.01, 0.1, 0.2]。根据图1(b)每条线的曲线下面积(AUC),最佳参数值如表1所示。
----这些结果与之前的研究结果一致,表明使用 DPBA 方法的agent对这个好的建议学习得更快,相对于不使用建议(即 DPBA 线收敛得更快,达到最优行为)。请注意,在网格世界的任务中,期望的行为是尽可能快地达到目标。因此,对于这个任务,在显示步骤(y 轴)和情节(x 轴)的情节(如图1中的情节)中,越低越好。相比之下,推车杆任务中目标的本质要求在每个阶段采取尽可能多的步骤,作为期望的行为。因此,对于推车杆高的情况,在同样轴线的情况下,效果更好。图1中的结果表明,DPBA 方法满足标准1(它可以使用任意奖励)和标准3(好的建议可以提高性能)。然而,正如我们在下一节中所讨论的,原始论文证明中的一个缺陷意味着准则2不能满足: 最优策略可以改变,也就是说,建议可以导致agent人收敛到次优策略。这在原始论文中没有经过实证检验,因此这种失败没有被注意到。
3. DPBA 会影响最优政策
上一节描述了DPBA,这是一种方法,可以通过迭代学习势函数 Φ Φ Φ并与塑形状态-动作值 Q M ′ Q_{M′} QM′同时学习,将任意专家的建议纳入强化学习框架。Harutyunyan等人[8]声称,如果 Φ Φ Φ, Φ 0 Φ_{0} Φ0的初始值被初始化为零,则agent可以简单地遵循相对于Q_{M′}贪婪的策略以实现策略不变性。在本节中,我们证明了这一说法不幸不成立:将 Φ 0 ( s , a ) Φ_{0}(s, a) Φ0(s,a)初始化为零不足以保证策略不变性。
-------------为了证明我们的主张,我们从定义术语开始。我们将比较两个MDP中给定策略 π π π的Q值估计,原始MDP由元组描述的 M M M表示 ⟨ S 、 A 、 T 、 γ 、 R ⟩ ⟨S、 A、T、γ、R⟩ ⟨S、A、T、γ、R⟩, 以及由DPBA成形的MDP, M ′ M^{′} M′, 由元组描述 ⟨ S , A , T , γ , R + F t + 1 ⟩ ⟨S, A, T, γ, R+F_{t+1}⟩ ⟨S,A,T,γ,R+Ft+1⟩, 其中 F t + 1 ( s , a , s ′ , a ′ ) : = Φ t + 1 ( s ′ , a ′ ) − Φ t ( s , a ) F_{t+1}(s,a,s',a'):=Φ_{t+1}(s^{′},a')−Φ_{t}(s,a) Ft+1(s,a,s′,a′):=Φt+1(s′,a′)−Φt(s,a)
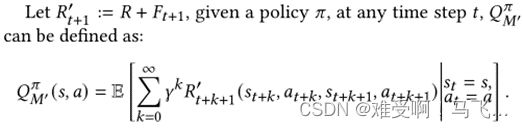

------无限求和中的两个项看起来非常相似,这促使我们通过移位求和变量k来重写其中一个项。这种移位将使相同的项被抵消。然而,我们需要小心。首先,我们重写极限形式的和。无限和可以写成:
在等式7中,如果 Q t π ( s , a ) Q_{t}^{\pi}(s,a) Qtπ(s,a)是有界的,那么当W接近无穷大时,极限内的第一项将变为0,而第二项不依赖于W,可以拉到极限外:

3.1 经验验证:无用的建议
----我们通过一系列实验验证了上述结果。首先,考虑一个确定性的2 × 2网格世界,我们称之为玩具示例,如图2所示。agent从状态 S 开始每一集,并且可以沿着四个基本方向移动(如图所示) ,直到达到目标状态 G (最多100步)。向墙移动(用粗线表示)不会改变agent的位置。除了在目标状态结束的一个转换之外,每个转换的奖励都是0,结果奖励 1和剧集终止。作为建议,我们假设“专家”奖励agent人偏离目标的转变。图2(a)中网格内的蓝色箭头表示专家建议的状态转换。代理通过执行建议的转换从专家处获得+1。由于该建议鼓励不良行为,我们预计它会减慢学习速度(而不是加快学习速度),但如果一种成形方法是策略不变的,则代理最终仍应收敛到最优策略。
----学习器使用Sarsa(0)估计Q值,γ=0.3。我们使用 ϵ − g r e e d y ϵ−greedy ϵ−greedy策略,对具有校正DPBA的学习者(等式9)和具有DPBA的学生(等式4)进行了实验。 Φ Φ Φ和 Q Q Q被初始化为0, ϵ ϵ ϵ从0.1衰减为0。对于 Q Q Q和 Φ Φ Φ值函数 α α α和 β β β的学习率,我们扫描了值[0.05、0.1、0.2、0.5]。根据每条线的AUC,最佳值报告在表2中。图3将每集的长度描述为完成该集所需的步骤数。Sarsa线表示没有整形的Sarsa(0) agent的学习曲线。图3显示了DPBA没有收敛到带有错误建议的最优策略。该图还证实了我们的结果,即 Φ t Φ_{t} Φt(而不是Harutyunyan等人[8]中提出的 Φ 0 Φ_{0} Φ0)是充分的校正项,以恢复最大化MDP原始奖励的最优策略。最后,我们验证了这不仅仅是agent开发过快的产物,并针对不同的开发速率重复相同的实验。我们考虑了另外两个不同的初始勘探率值,即0.3和0.5。
----图3中的相应行证实了额外的探索不会让DPBA获得最佳策略。图3还证实了等式9中导出的修正策略收敛于最优策略,即使专家建议不好。
3.2 经验验证: 有用的建议
----上一节表明,DPBA不是一种策略不变的塑形方法,因为将 Φ Φ Φ值初始化为零不是策略不变的充分条件。我们表明,DPBA可以通过添加正确的偏差项和策略不变量来校正。虽然添加正确的偏差项保证了策略的不变性,但我们仍然需要测试期望的奖励成形算法的第三个标准-校正后的DPBA是否能够在良好的专家建议下加速成形agent的学习?
----图4显示了与前一小节重复相同实验的结果,但是与图2(b)所示的优秀专家一起(即,从每个状态,专家鼓励agent朝着目标前进)。在这里,由于专家鼓励agent朝着目标前进,我们期望塑形agent比没有得到塑形奖励的agent学得更快。但是,图4显示了更正后的agent不能通过好的建议更快地学习。
----出乎我们意料的是,该建议实际上减缓了学习速度,尽管纠正后的DPBA agent最终如预期那样发现了最佳策略。要解释校正后的DPBA行为,需要仔细观察 Q Q Q和 Φ Φ Φ估计值是如何变化的。校正后的DPBA在每个时间步加上 Φ Φ Φ的最新值,以校正塑形的 Q Q Q值;然而,先前用于塑形奖励函数的 Φ Φ Φ值可能与最新值不同。让我们考虑 Φ Φ Φ已初始化为零的情况,建议总是一个积极的信号,强制 Φ Φ Φ值为负。对于这样的 Φ Φ Φ值,最新的Φ值比用于塑形奖励的早期值更负,这实际上阻碍了期望的行为。
----虽然校正后的DPBA保证了策略的不变性,但它无法满足理想奖励塑形的第三个目标(即,通过有用的建议加快agent的学习)。
----本节的主要结论是,上述用于纳入专家建议的奖励塑形方法均不满足三个理想目标。[8]中提出的DPBA可以导致更快的学习,如果专家提供了好的建议,但它不是策略不变的。本节中提出的修正DPBA是可证明的策略不变的,但即使提供了良好的建议,它也会导致学习速度减慢。
4. 策略不变显式塑形POLICY INVARIANT EXPLICIT SHAPING
----在这一部分中,我们介绍了满足我们在第1节中指定的所有奖励塑形目标的策略不变显式塑形(policy invariant explicit shaping,PIES)算法。PIES 是一个简单的算法,它可以接受任意的建议,具有策略不变性,并且可以根据专家的建议加快agent的学习速度。与基于势能的奖励塑形不同,PIES背后的主要思想是明确使用专家建议,而不修改原始奖励函数。不改变奖励函数是简化PIES并使分析其工作方式更容易的主要特征。PIES agent学习等式(1)中的原始值函数 Q M Q_M QM,同时学习等式(2)中基于专家建议的二次值函数 Φ Φ Φ。为了利用任意建议,agent通过在每个时间步 t 将 − Φ -Φ −Φ 添加到 Q M Q_M QM 显式地使agent的策略偏向于建议,并且通过参数 ξ t \xi _{t} ξt加权,其中 ξ t \xi _{t} ξt在学习结束之前衰减为0。
-------------------------------- Q t + 1 ( s t , a t ) = Q t ( s t , a t ) + α t δ t Q_{t+1}(s_{t},a_{t})=Q_{t}(s_{t},a_{t})+\alpha _{t}\delta _{t} Qt+1(st,at)=Qt(st,at)+αtδt ------------------------------(1)
--------------------------------- Φ t + 1 ( s , a ) : = Φ t ( s , a ) + β δ t Φ Φ_{t+1}(s,a):=Φ_{t}(s,a)+\beta \delta _{t}^{\Phi } Φt+1(s,a):=Φt(s,a)+βδtΦ-------------------(2)
例如,对于配备PIES的Sarsa(0) agent,当agent想要贪婪地行动时,它将在每个时间步选择使 最大化的动作。最佳策略是:

参数 ξ t \xi _{t} ξt控制agent当前的动作在多大程度上偏向于建议。随着时间的推移,将 ξ t \xi _{t} ξt衰减为0将消除塑形的影响,从而保证agent将收敛到最优策略,使PIES策略保持不变。衰减 ξ \xi ξ的速度决定了建议将持续多久影响agent的学习策略。选择 ξ \xi ξ的衰减速度可以与利用建议的益处有关,并且可以通过许多不同的方式来实现。对于本文,我们只在每一集结束时以线性状态减小 。更具体地说,第e集期间的 ξ \xi ξ值为:

其中 C C C 是一个常数,它决定了 ξ \xi ξ衰减的速度; 即, C C C 越大,偏差衰减越慢。
我们首先通过经验证明 PIES 实现了玩具示例中的所有三个目标。然后,我们将展示在提供良好建议的情况下,它如何针对网格世界中以前的方法和购物车杆问题(最初针对 DPBA 进行了测试)执行。所有域的规范都和以前一样。图5中玩具示例中agent的表现图显示了校正后的DPBA、PIES和Sarsa学习者的学习曲线。图5(a)是针对2(a)中所示的坏专家,图5(b)是针对2中所示的好专家。Sarsa(0)用于估计e=0.3和e-贪婪策略的状态动作值。 Φ Φ Φ和 Q Q Q被初始化为0,e从0.1衰减为0。对于 Q Q Q和 Φ Φ Φ值函数α和β的学习率,我们扫描了值[0.05、0.1、0.2、0.5]。设置 C C C的研究值为[5,10,20,50]。值得一提的是,我们根据建议的质量设置了 的衰减速度(通过设置 C C C);例如,坏建议的 C C C值越小越好,因为它会更快地衰减对抗性偏见的影响,而好建议的 C C C越大越好,因为这会减缓衰减。根据每条线的AUC,使用最佳值。学习参数如表3所示。

正如预期的那样,使用 PIES,即使是坏专家,agent也能够找到最优策略。对于有益的建议,PIES 使agent能够更快地学习任务。然而,在玩具问题上,速度的加快并不显著,因为简单的学习者也能够在很少的情节中学习。
图6更好地展示了 PIES 如何通过在两个更复杂的任务中提供良好的建议来提高agent学习的性能: 网格世界和购物车-极点域,这在2.2节中有描述。对于这两个任务,相似的学习参数(那些我们没有重新状态的)继承了它们之前实验的值。为了找到最佳值,扫描了[50,100,200,300]的值。在 grid-world 任务(图6(a))中,并在值[0.05,0.1,0.2,0.5]上选择。在车杆任务(图6(b))中,为了设置学习率,扫描了[0.001,0.002,0.01,0.1,0.2]的值。与以前一样,图6(a)和6(b)的每一行的 AUC 值为最佳参数值,分别在表4和表5中报告。与前面一样,对于购物车杆任务的绘图,上面的线表示性能更好,而对于网格世界,下面的线表示性能更好。
PIES在两个领域都正确地使用了好的建议,并在不改变最优策略的情况下改进了对Sarsa学习者的学习(即PIES以比Sarsa学生更快的速度接近最优行为)。PIES的表现比纠正的DPBA好,正如预期的那样,因为纠正后的DPBA不能用好的建议加速学习者。当我们有任意形式的建议时,无论建议的质量如何,PIES都是DPBA的可靠替代方案。如图所示,PIES满足所有三个所需标准。
