Orangepi Zero2——手机连接Linux与语音模块串口通信
文章目录
- 手机连接Linux
- adb控制指令
- 语音模块控制手机
-
- 语音模块配置
- 香橙派的配置
- 香橙派程序
手机连接Linux
1、把手机接入开发板
2、安装 adb 工具,在终端输入 adb 安装指令:
sudo apt-get install adb
3、dmesg 能查看到手机接入的信息,但是输入adb devices会出现提醒
dinsufficient permissions for device: user in plugdev group; are your udev rules wrong?
4、配置文件,以支持USB设备的热拔插,支持UDEV的机制
在/etc/udev/rules.d 文件夹下创建规则文件
cd /etc/udev/rules.d/
sudo vim 51-android.rules
在文件中添加内容 SUBSYSTEM==“usb”, ENV{DEVTYPE}==“usb_device”, MODE=“0666”
5、如果无法连接上,则需要在手机开发者选项中,打开USB调试,重新拔插手机,点击信任此设备
6、输入 adb devices 进行手机的连接
7、输入 adb shell 进行编程
adb控制指令
用 shell 指令来操作手机屏幕,模拟手动滑屏幕
1、向下滑动。从坐标点(540,1300)用100ms滑动到坐标点(540,500)
adb shell input swipe 540 1300 540 500 100
2、 向下滑动。从坐标点(540,500)用100ms滑动到坐标点(540,1300)
adb shell input swipe 540 500 540 1300 100
3、双击。点击坐标点(540,1050)两次,间隔0.1s
adb shell "seq 2 | while read i;do input tap 540 1050 & input tap 540 1050 & sleep 0.1;done;"
4、锁屏。
adb shell input keyevent 26
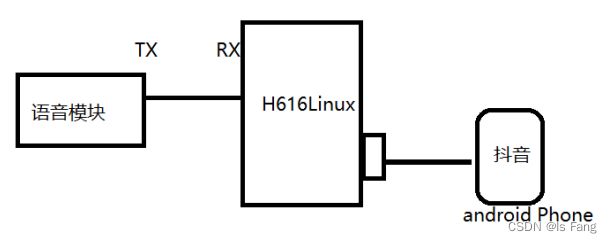
语音模块控制手机
设备连接图
语音模块配置
- 进入语音模块官网 http://www.smartpi.cn/#/,配置词条和识别后的串口输出指令,输出SDK
- 使用固件烧录工具,通过串口烧录进语音识别模块的SDK
- 先让语音固件先和电脑调试助手配合,验证数据
香橙派的配置
- 通过远程连接平台输出控制语句,检验是否可以操作手机完成相应的动作
香橙派程序
- 香橙派与语音固件通过串口进行通信
uartTest.c
#include uartTool.c
#include uartTool.h
//香橙派获取语音固件发送的字符
char myserialGetchar (const int fd);
int myserialOpen (const char *device, const int baud);
void serialSendstring (const int fd, const char *s);
int serialGetstring (const int fd, char *buffer);