利用pytorch复现resnet对cifar-10进行分类
一、resnet创新点
传统的卷积网络在网络很深的时候,会出现梯度消失或者梯度爆炸的现象而resnet就能很好的解决这个问题。
resnet最为创新的一点是残差结构,它使用了一种连接方式叫做“shortcut connection”,顾名思义,shortcut就是“抄近道”的意思。示意图如下。

它对每层的输入做一个reference(X), 学习形成残差函数, 而不是学习一些没有reference(X)的函数。这种残差函数更容易优化,能使网络层数大大加深。
resnet还有一种结构,用在resnet50/101/102上。
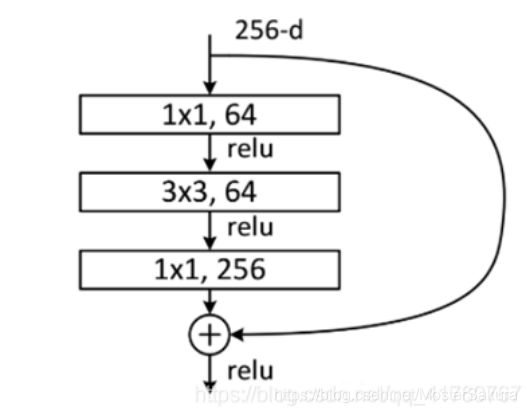
极大程度上的减小了参数量,它将两个3x3的卷积层替换为1x1 + 3x3 + 1x1。第一个1x1的卷积把256维channel降到64维,然后在最后通过1x1卷积恢复,整体上用的参数数目:1x1x256x64 + 3x3x64x64 + 1x1x64x256 = 69632,而不使用bottleneck的话就是两个3x3x256的卷积,参数数目: 3x3x256x256x2 = 1179648,差了16.94倍。
二、代码部分
(一)数据预处理
引入包库
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
import os
import argparse
from torch.autograd import Variable参数设置
parser = argparse.ArgumentParser(description='cifar10')
parser.add_argument('--lr', default=1e-2, help='learning rate')
parser.add_argument('--epoch', default=20, help='time for ergodic')
parser.add_argument('--pre_epoch', default=0, help='begin epoch')
# 输出结果保存路径
parser.add_argument('--outf', default='./model/', help='folder to output images and model checkpoints')
# 恢复训练时的模型路径
parser.add_argument('--pre_model', default=True, help='use pre-model')
args = parser.parse_args()
# 使用gpu
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")图像处理
transform_train = transforms.Compose([
# transforms.RandomCrop(32, padding=4), # 先四周填充0,再把图像随机裁剪成32*32
# transforms.Resize(256),
# transforms.CenterCrop(224),#从中心开始裁剪
transforms.RandomHorizontalFlip(), # 图像一半的概率翻转,一半的概率不翻转
transforms.ToTensor(),
# transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
])
transform_test = transforms.Compose([
transforms.ToTensor(),
# transforms.Resize(256),
# transforms.CenterCrop(224),#从中心开始裁剪
# transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))
])加载数据
trainset = torchvision.datasets.CIFAR10(root='./data/', train=True, download=False, transform=transform_train)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=128, shuffle=True, num_workers=0)
testset = torchvision.datasets.CIFAR10(root='./data/', train=False, download=False, transform=transform_test)
testloader = torch.utils.data.DataLoader(testset, batch_size=128, shuffle=False, num_workers=0)
# Cifar-10的标签
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')定义模型
import torch
import torch.nn as nn
import torch.nn.functional as F
#定义残差块
class ResidualBlock(nn.Module):
def __init__(self, inchannel, outchannel, stride):
super(ResidualBlock, self).__init__()
self.left = nn.Sequential(
nn.Conv2d(inchannel, outchannel, kernel_size=3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(outchannel),
nn.ReLU(inplace=True),
nn.Conv2d(outchannel, outchannel, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(outchannel)
)
self.shortcut = nn.Sequential()
if stride != 1 or inchannel != outchannel:
self.shortcut = nn.Sequential(
nn.Conv2d(inchannel, outchannel, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(outchannel)
)
def forward(self, x):
out = self.left(x)
out += self.shortcut(x)
out = F.relu(out)
return out
#resnet主体
class ResNet(nn.Module):
def __init__(self, ResidualBlock, num_classes=10):
super(ResNet, self).__init__()
self.inchannel = 64
self.conv1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(),
)
self.layer1 = self.make_layer(ResidualBlock, 64, 2, stride=1)
self.layer2 = self.make_layer(ResidualBlock, 128, 2, stride=2)
self.layer3 = self.make_layer(ResidualBlock, 256, 2, stride=2)
self.layer4 = self.make_layer(ResidualBlock, 512, 2, stride=2)
self.fc = nn.Linear(512, num_classes)
def make_layer(self, block, channels, num_blocks, stride):
strides = [stride] + [1] * (num_blocks - 1) #strides=[1,1]
print(strides)
layers = []
for stride in strides:
layers.append(block(self.inchannel, channels, stride))
self.inchannel = channels
return nn.Sequential(*layers)
def forward(self, x):
out = self.conv1(x)
out = self.layer1(out)
out = self.layer2(out)
out = self.layer3(out)
out = self.layer4(out)
out = F.avg_pool2d(out,4)
out = out.view(out.size(0), -1)
out = self.fc(out)
return out
#定义resnet18
def ResNet18():
return ResNet(ResidualBlock)
if __name__=='__main__':
model = ResNet18()
print(model)
input = torch.randn(1, 3, 32, 32)
out = model(input)
print(out.shape)定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=args.lr, momentum=0.9,
weight_decay=5e-4)
训练部分
best_test_acc = 0
pre_epoch = args.pre_epoch
if __name__ == "__main__":
if not os.path.exists('./model'):
os.mkdir('./model')
#writer = SummaryWriter(log_dir='./log')
print("Start Training, VGG-16...")
with open("acc.txt", "w") as acc_f:
with open("log.txt", "w") as log_f:
for epoch in range(pre_epoch, args.epoch):
print('\nEpoch: %d' % (epoch + 1))
# 开始训练
net.train()
print(net)
# 总损失
sum_loss = 0.0
# 准确率
accuracy = 0.0
total = 0.0
for i, data in enumerate(trainloader):
# 准备数据
length = len(trainloader) # 数据大小
inputs, labels = data # 取出数据
#inputs, labels = inputs.to(device), labels.to(device)
optimizer.zero_grad() # 梯度初始化为零(因为一个batch的loss关于weight的导数是所有sample的loss关于weight的导数的累加和)
inputs, labels = Variable(inputs), Variable(labels)
# forward + backward + optimize
outputs = net(inputs) # 前向传播求出预测值
loss = criterion(outputs, labels) # 求loss
loss.backward() # 反向传播求梯度
optimizer.step() # 更新参数
# 每一个batch输出对应的损失loss和准确率accuracy
sum_loss += loss.item()
_, predicted = torch.max(outputs.data, 1) # 返回每一行中最大值的那个元素,且返回其索引
total += labels.size(0)
accuracy += predicted.eq(labels.data).cpu().sum() # 预测值和真实值进行比较,将数据放到cpu上并且求和
print('[epoch:%d, iter:%d] Loss: %.03f | Acc: %.3f%% '
% (epoch + 1, (i + 1 + epoch * length), sum_loss / (i + 1), 100. * accuracy / total))
# 写入日志
log_f.write('[epoch:%d, iter:%d] |Loss: %.03f | Acc: %.3f%% '
% (epoch + 1, (i + 1 + epoch * length), sum_loss / (i + 1), 100. * accuracy / total))
log_f.write('\n')
log_f.flush()
# 每一个训练epoch完成测试准确率
print("Waiting for test...")
# 在上下文环境中切断梯度计算,在此模式下,每一步的计算结果中requires_grad都是False,即使input设置为requires_grad=True
with torch.no_grad():
accuracy = 0
total = 0
for data in testloader:
# 开始测试
net.eval()
images, labels = data
#images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1) # 返回每一行中最大值的那个元素,且返回其索引(得分高的那一类)
total += labels.size(0)
accuracy += (predicted == labels).sum()
# 输出测试准确率
print('测试准确率为: %.3f%%' % (100 * accuracy / total))
acc = 100. * accuracy / total
# 写入tensorboard
#writer.add_scalar('accuracy/test', acc, epoch)
# 将测试结果写入文件
print('Saving model...')
torch.save(net.state_dict(), '%s/net_%3d.pth' % (args.outf, epoch + 1))
acc_f.write("epoch = %03d, accuracy = %.3f%%" % (epoch + 1, acc))
acc_f.write('\n')
acc_f.flush()
# 记录最佳的测试准确率
if acc > best_test_acc:
print('Saving Best Model...')
# 存储状态
state = {
'state_dict': net.state_dict(),
'acc': acc,
'epoch': epoch + 1,
}
# 没有就创建checkpoint文件夹
if not os.path.isdir('checkpoint'):
os.mkdir('checkpoint')
# best_acc_f = open("best_acc.txt","w")
# best_acc_f.write("epoch = %03d, accuracy = %.3f%%" % (epoch + 1, acc))
# best_acc_f.close()
torch.save(state, './checkpoint/ckpt.t7')
best_test_acc = acc
# 训练结束
print("Training Finished, Total Epoch = %d" % epoch)三、训练结果
最终resnet18在测试集上准确率为0.76,resnet50在测试集上准确率为0.77