详解3D物体检测模型 SPG: Unsupervised Domain Adaptation for 3D Object Detection via Semantic Point Generation
本文对基于激光雷达的无监督域自适应3D物体检测进行了研究,论文已收录于 ICCV2021。
在Waymo Domain Adaptation dataset上,作者发现点云质量的下降是3D物件检测器性能下降的主要原因。因此论文提出了Semantic Point Generation (SPG)方法,首先在预测的前景点区域生成语义点云,复原前景点物体缺失的部分。然后,将原始点云与生成的语义点云进行融合得到增强后的点云数据,再使用通用的3D物体检测器进行检测。在Waymo 和 KITTI 数据集上,无论是在target domain 还是 source domain上,本文提出的SPG方法都大幅提高了3D物检检测器的性能。
论文链接为:https://arxiv.org/pdf/2108.06709v1.pdf
1. Introduction
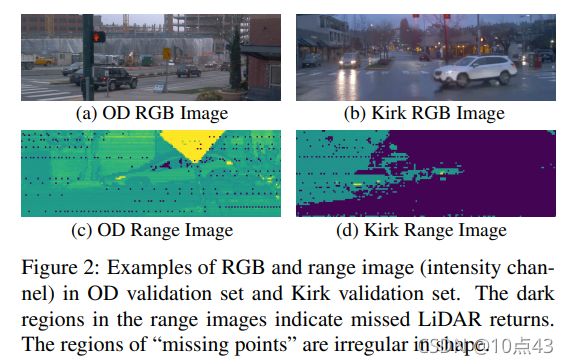
首先是引出本文要解决的问题:Waymo Open Dataset (OD)数据集是在California和Arizona收集的,而Waymo Kirkland Dataset (Kirk)是在Kirk收集的,这里将OD数据当作source domain,Kirk数据当作target domain。
作者使用PointpPllars模型在OD训练集上训练,然后在OD和Kirk验证集上进行验证。从表1可以看出,雨天下收集到的点云质量下降很厉害,平均每帧缺失点数几乎是干燥天气下的两倍,检测性能也下降了27%左右;同时从Range Image上也可以看出雨天下物体点云缺失的区域也更不规则。
 |
 |
2. Semantic Point Generation
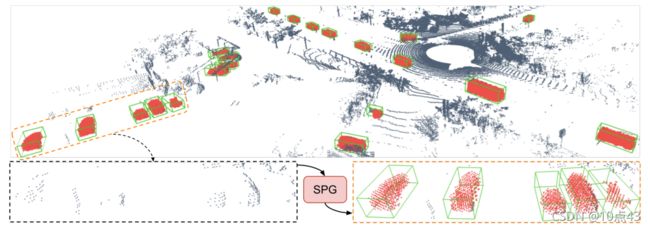
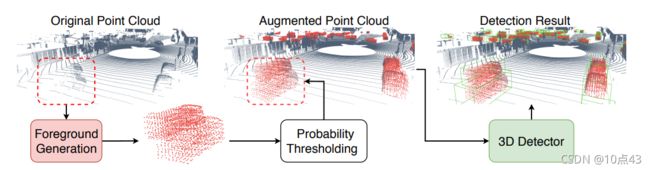
本文提出的SPG辅助检测方法如下图所示,SPG首先在预测的前景点区域生成语义点集,然后语义点集与原始点云相结合得到增强点云 P C a u g PC_{aug} PCaug,最后再使用一个点云检测器得到检测结果。
2.1 Training Targets
设原始输入点云为 P C r a w = { p 1 , p 2 , . . . , p N } ∈ R 3 + F PC_{raw}=\{p_1,p_2,...,p_N\} \in \mathbb{R}^{3+F} PCraw={p1,p2,...,pN}∈R3+F, 3 3 3 表示点云坐标, F F F 表示点云属性。
SPG首先将原始点云划分为一个个Voxel,对于每一个Voxel,模型首先预测其为前景Voxel的概率 P ~ f \tilde{P}^{f} P~f,然后在每一个前景Voxel生成语义点集 s p ~ \tilde {sp} sp~,其特征为 ψ ~ = [ χ ~ , f ~ ] \tilde{\psi}=[\tilde{\chi}, \tilde{f}] ψ~=[χ~,f~],分别表示语义点集的坐标和属性。- 在与原始点云融合时只保留置信度超过 P t h r e s h P_{thresh} Pthresh 的 K K K 个点,得到增强后的点云 P C a u g = { p ^ 1 , p ^ 2 , … , p ^ N , s p ~ 1 , s p ~ 2 , … , s p ~ K } ∈ R 3 + F + 1 PC_{aug}=\left\{\hat{p}_{1}, \hat{p}_{2}, \ldots, \hat{p}_{N}, \tilde{s p}_{1}, \tilde{s p}_{2}, \ldots, \tilde{s p}_{K}\right\} \in \mathbb{R}^{3+F+1} PCaug={p^1,p^2,…,p^N,sp~1,sp~2,…,sp~K}∈R3+F+1,
最后一个通道表示点为前景点的置信度,原始点云则置信度为 1.0 1.0 1.0,语义点集则置信度为 P ~ f \tilde{P}^f P~f。
在训练时,如果划分的Voxel为前景voxel V f V^f Vf,则其对应类别 y i f = 1 y_i^f=1 yif=1,否则为 y i f = 0 y_i^f=0 yif=0。如果划分的Voxel非空的话, 令 ψ i = [ χ ˉ i , f ˉ i ] \psi_{i}=\left[\bar{\chi}_{i}, \bar{f}_{i}\right] ψi=[χˉi,fˉi] 为回归目标,其中 χ i ˉ \bar{\chi_i} χiˉ 为Voxel中所有前景点的平均坐标, f ˉ i \bar{f}_i fˉi 为前景点的属性平均值。
2.2 Model Structure
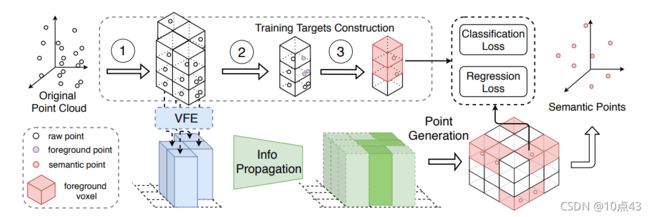
SPG模型结构由三部分组成:
- 首先是Voxle特征编码模块,对每一个Voxel进行特征学习,编码成pillars投影到鸟瞰图;
- 然后是信息传播模块,将非空pillars语义信息传播到附近非空pillars;
- 最后是语义点集生成模块,在每一个前景Voxel生成语义点集 s p ~ i = [ χ ~ i , f ~ i , P ~ i f ] \tilde{sp}_i=\left[\tilde{\chi}_{i}, \tilde{f}_{i}, \tilde{P}_{i}^{f}\right] sp~i=[χ~i,f~i,P~if]。
2.3 Foreground Region Recovery
为了在 empty areas 生成语义点集,作者设计了两个策略Hide and Predict和Semantic Area Expansion。
- Hide and Predict。原始点云 P C r a w PC_{raw} PCraw 划分为Voxel集合 V = { v 1 , v 2 , . . . , v M } V=\{v_1,v_2,...,v_M\} V={v1,v2,...,vM},在训练时,丢弃 γ % \gamma\% γ%的非空Voxel V h i d e V_{hide} Vhide,
SPG需要预测出这些隐藏的Voxel标签 y f y^f yf和对应点特征 ψ ~ \tilde{\psi} ψ~。 - Semantic Area Expansion。作者设计了一个扩展语义区域策略(图5所示),用以在
empty space生成语义点集。具体地,非空和空的背景Voxel为 V o b , V e b V_o^b,V_e^b Vob,Veb,其对应标签为 y f = 0 y^f=0 yf=0;非空前景Voxel V o f V_o^f Vof 类别标签 y f = 1 y^f=1 yf=1;bounding box中空的前景Voxel V e f V_e^f Vef 类别标签为 y f = 1 y^f=1 yf=1,同时增加一个权重系数 α < 1 \alpha < 1 α<1;监督学习非空前景Voxel V o f V_o^f Vof 点集特征 ψ \psi ψ。图6为是否使用Expansion生成语义点集的效果。
 |
 |
2.4 Objectives
损失函数有两个,一个是类别损失函数,其中 V o V_o Vo 为非空Voxel, V e b V_e^b Veb 为空的背景Voxel, V e f V_e^f Vef 为空的前景Voxel, V h i d e V_{hide} Vhide 为隐藏的Voxel。
L c l s = 1 ∣ V o ∪ V e b ∣ ∑ V o ∪ V e b L focal + α ∣ V e f ∣ ∑ V e f L focal + β ∣ V hide ∣ ∑ V hide L focal \begin{aligned} L_{c l s} &=\frac{1}{\left|V_{o} \cup V_{e}^{b}\right|} \sum_{V_{o} \cup V_{e}^{b}} L_{\text {focal }} +\frac{\alpha}{\left|V_{e}^{f}\right|} \sum_{V_{e}^{f}} L_{\text {focal }}+\frac{\beta}{\left|V_{\text {hide }}\right|} \sum_{V_{\text {hide }}} L_{\text {focal }} \end{aligned} Lcls=∣Vo∪Veb∣1Vo∪Veb∑Lfocal +∣∣∣Vef∣∣∣αVef∑Lfocal +∣Vhide ∣βVhide ∑Lfocal
另一个是点集回归损失函数:
L reg = 1 ∣ V o f ∣ ∑ V o f L smooth- L 1 ( ψ ~ , ψ ) + β ∣ V hide f ∑ V hide f L smooth-L1 ( ψ ~ , ψ ) \begin{aligned} L_{\text {reg }} &=\frac{1}{\left|V_{o}^{f}\right|} \sum_{V_{o}^{f}} L_{\text {smooth- } L 1}(\tilde{\psi}, \psi) +\frac{\beta}{\mid V_{\text {hide }}^{f}} \sum_{V_{\text {hide }}^{f}} L_{\text {smooth-L1 }}(\tilde{\psi}, \psi) \end{aligned} Lreg =∣∣∣Vof∣∣∣1Vof∑Lsmooth- L1(ψ~,ψ)+∣Vhide fβVhide f∑Lsmooth-L1 (ψ~,ψ)
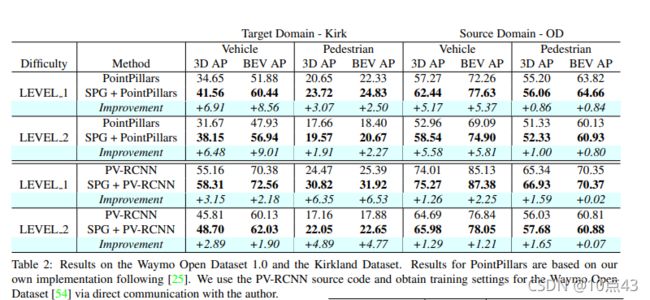
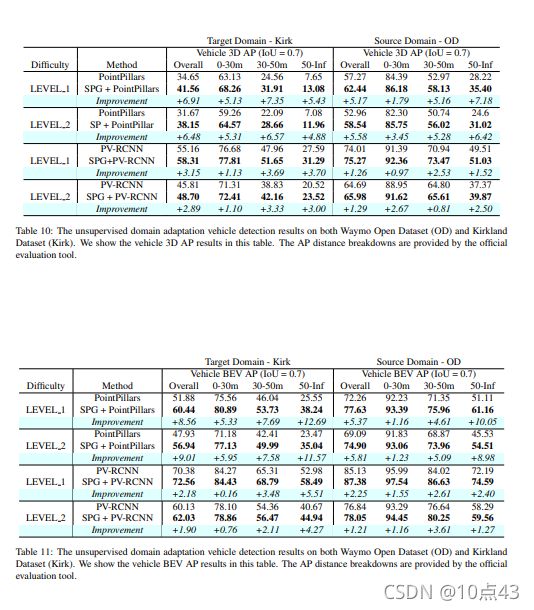
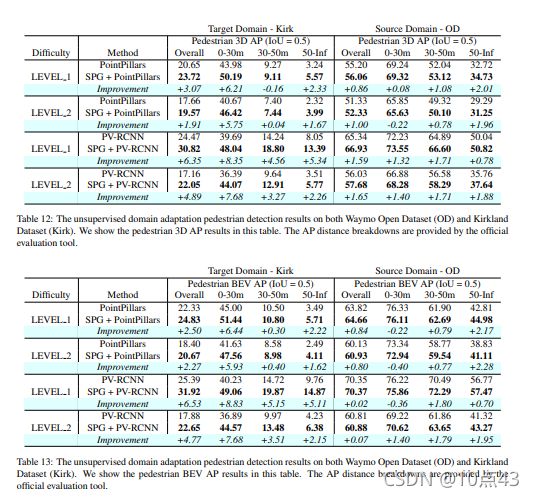
3. Experiments
首先是在Waymo数据集上的检测结果:
 |
 |
 |
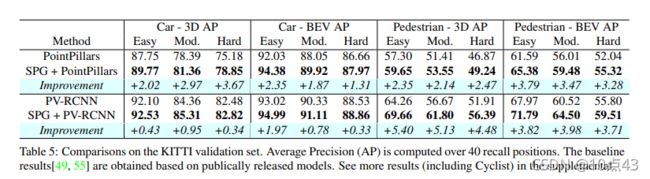
然后是在KITTI数据集上的检测结果。
 |
 |