(三维重建论文)iSDF:Real-time Neural Signed Distance Fields for Robot Perception 代码运行与学习
(三维重建)iSDF:Real-time Neural Signed Distance Fields for Robot Perception 代码运行与学习
转载前一定要联系,不联系就不要转载啦~
文章目录
- 0 说明
- 1 在提供姿势的序列上运行 iSDF
-
- 1.0 下载代码
- 1.1 配置环境
-
- 步骤1
- 步骤2
- 步骤3
- 步骤4
- 1.2 下载数据序列
-
- 1.2.1 ReplicaCAD数据
-
- (1)简介
- (2) 下载数据
- (3) 报错相关
- 1.2.2 所有12个序列
- 1.2.3 ScanNet
-
- (1)简介
- (2)下载数据序列并导出颜色图、深度图、内参、位姿
- 1.2.4 Tabletop dataset
-
- (1)简介
- 1.3 训练
-
- 1.3.1 replicaCAD数据序列
-
- (1)使用默认数据序列
- (2)使用`apt_3_nav`数据序列
- (3)其他数据序列类似处理
- 1.3.2 ScanNet数据序列
-
- (1)使用`scene0005_00`数据序列
-
- 报错:/opencv/modules/imgproc/src/color.cpp:182: error: (-215:Assertion failed) !_src.empty() in function 'cvtColor'
- (2)其他数据序列
- 1.4 训练步骤报错
-
- (1) import不到其他文件夹下面的内容
- (2) 找不到包的报错
- (3) reload(sys)报错---可以上网搜,针对自己电脑情况进行修改
- (4) `AttributeError: 'open3d.cuda.pybind.visualization.gui.Application' object has no attribute 'add_font'`
- (5) 设置了导致在终端无法pip安装包
- (6) TypeError: clamp(): argument ‘min‘ (position 2) must be Number, not Tensor
- (7) X Error of failed request: GLXBadFBConfig
- 1.5 SDF 精度图绘制(SDF accuracy plots)
- 1.6 重现实验(Reproducing experiments)
-
- (1)重现实验流程说明
- (2)重现实验2
-
- 所有数据序列
- 前三个数据序列
- 前1个数据序列--即`apt_2_mnp`数据序列
- 第2个数据序列--即`apt_2_obj`数据序列
- 第3个数据序列--即`apt_2_nav`数据序列
- 第4个数据序列--即`apt_3_mnp`数据序列
- 第5个数据序列--即`apt_3_obj`数据序列
- 第6个数据序列--即`apt_3_nav`数据序列--显存不足
- 第10个数据序列--即`scene0004_00`数据序列
- 第11个数据序列--即`scene0005_00`数据序列
- 第12个数据序列--即`scene0009_00`数据序列
- 第9个数据序列--即`scene0031_00`数据序列--显存不足
- (3)绘制SDF精度图
- (4)比较绘制SDF精度图
0 说明
iSDF提供三种代码运行模式,
(1)在提供姿势的序列上运行 iSDF:用于在本文中使用的 ScanNet 和 ReplicaCAD 序列上运行 iSDF。
(2)在 ROS 中使用实时摄像头运行 iSDF:iSDF 的 ros 包装器订阅由 ORB-SLAM3 包装器发布的姿势帧主题。
(3)在 ROS 中使用 Franka 和实时摄像头运行 iSDF:iSDF 的 ros 包装器订阅了来自 Franka Panda 机器人上校准的 realsense 的 realsense 帧和姿势的主题。
这里实现第一种
1 在提供姿势的序列上运行 iSDF
1.0 下载代码
git clone https://github.com/facebookresearch/iSDF.git && cd iSDF
硬件:RTX3070、ubuntu18.04
1.1 配置环境
步骤1
先参照作者github,使用anaconda配置环境(要安装的包比较多,可能会比较慢):
conda env create -f environment.yml
步骤2
如果出现Pip subprocess error、CondaEnvException: Pip failed即配置环境的过程中一些通过pip安装的包无法安装,下面将这些没有成功安装的包拿出来进行安装。
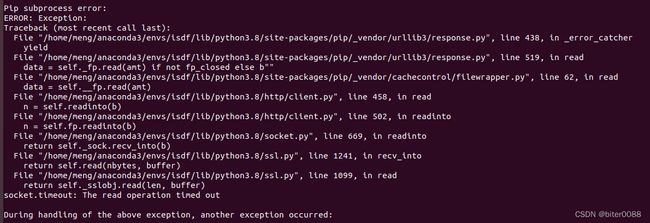
将没有安装的包copy出来,一般是从某一个包后的所有包都没有成功安装,粘贴进一个txt文件里面,我这里取名为requirements.txt
opencv-python==4.5.3.56
ordered-set==4.0.2
-----------省略显示
xxhash==2.0.2
zipp==3.8.1
进入刚刚配置的环境:conda activate isdf
补充安装包:pip install -r requirements_my.txt ,安装完成如下:

步骤3
进入pytorch官网页面:https://pytorch.org/get-started/previous-versions/
选一个不是很新,也不是很旧的版本,这里选了1.12.0
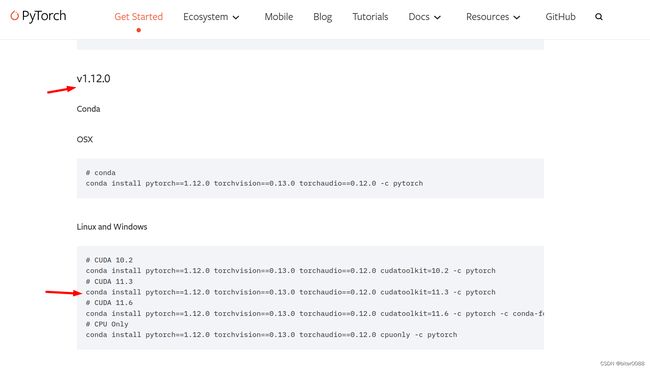
在python环境中输入:conda install pytorch==1.12.0 torchvision==0.13.0 torchaudio==0.12.0 cudatoolkit=11.3 -c pytorch
步骤4
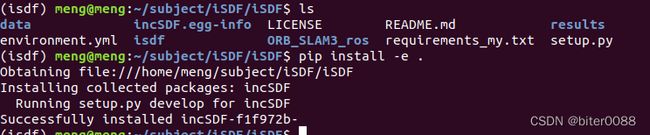
进入代码最父级目录(目录下有setup.py文件),安装isdf这个自定义的python包(名字叫做incSDF):
cd iSDF
pip install -e .
1.2 下载数据序列
1.2.1 ReplicaCAD数据
(1)简介
ReplicaCAD 数据集是艺术家对具有许多不同房间配置的 FRL 公寓的再创作。
通过模拟在两种不同公寓配置中移动的机车生成了 6 个序列。我们为每个公寓配置生成三种类型的序列。一个导航序列(nav),一个对象重建序列(obj)和一个操作序列(mnp)。
要生成序列,首先安装 Habitat-Sim 。然后可以通过运行此脚本生成序列
Habitat-Sim
一个支持物理学的高性能3D模拟器,支持:
·室内/室外空间的 3D 扫描(内置支持 HM3D、MatterPort3D、Gibson、Replica 和其他数据集)
·空间和分段刚性(piecewise-rigid)对象的 CAD 模型(例如 ReplicaCAD、YCB、Google 扫描对象),
·可配置传感器(RGB-D 相机、自我运动感应(egomotion sensing))
·通过 URDF 描述的机器人(像 Fetch 这样的移动机械手,像 Franka 这样的固定臂,像 AlienGo 这样的四足机器人),
·刚体力学(通过 Bullet)。
(2) 下载数据
注:在python环境中运行如下命令。
下载单个replicaCAD序列(约5GB):
bash data/download_apt_2_nav.sh
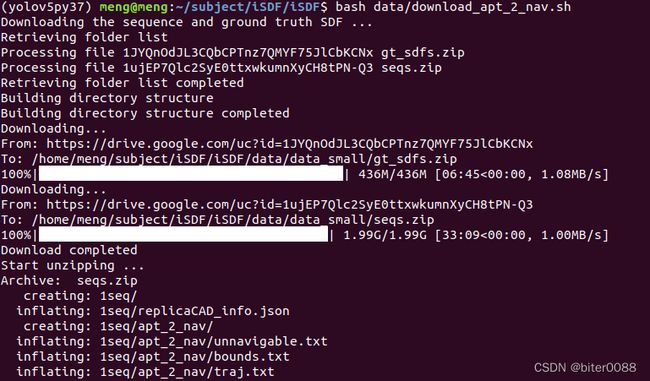

(3) 报错相关
gdown: 未找到命令,解决:pip install gdown
1.2.2 所有12个序列
下载所有12个序列(约15GB),注意这个下载会包含上面下载的数据:
bash data/download_data.sh

1.2.3 ScanNet
(1)简介
对于 ScanNet 数据集,我们使用 6 个序列。这些可以通过下载 ScanNet 数据集并使用此脚本导出序列(depth, color, poses and intrinsics)来获得。
我们使用 3 个更长和 3 个更短的随机选择的 ScanNet 序列。
更长的时间:scene0010_00:6.52m scene0030_00:6.98m scene0031_00:766m缩短:Space0004_00:9.55m scene0005_00:5.40m scace0009_00:7.00m
结合下面的训练情况来看,更长的时间的数据序列对显卡的要求更高,我的RTX3070就不太行
(2)下载数据序列并导出颜色图、深度图、内参、位姿
参考我的另一个笔记,下载scene0004_00,scene0005_00,scene0009_00,scene0010_00,scene0030_00,scene0031_00这6个序列
笔记链接:https://blog.csdn.net/BIT_HXZ/article/details/127641860
1.2.4 Tabletop dataset
(1)简介
桌面数据集由我们在装有 Realsense 相机的 Franka 上收集的 5 条短轨迹组成。我们扫描了各种 YCB 物体和 3D 打印的斯坦福兔子。
我这里暂时不考虑这个数据集
1.3 训练
1.3.1 replicaCAD数据序列
(1)使用默认数据序列
train文件夹:

执行命令:
cd isdf/train/
python train_vis.py --config configs/replicaCAD.json
思考:
观察重构的网格(Mesh reconstruction),相机重构的角度受限,只能获取正前方视野内的环境数据,对单个位置周围环境数据利用不如激光雷达
(2)使用apt_3_nav数据序列
修改:xx/iSDF/isdf/train/configs/replicaCAD.json如下:
"seq_dir": "/media/username/T7/dataset/iSDF/all_12_sequences/seqs/apt_3_nav/",
"gt_sdf_dir": "/media/username/T7/dataset/iSDF/all_12_sequences/gt_sdfs/apt_3/",
执行命令:
cd isdf/train/
python train_vis.py --config configs/replicaCAD.json
(3)其他数据序列类似处理
1.3.2 ScanNet数据序列
(1)使用scene0005_00数据序列
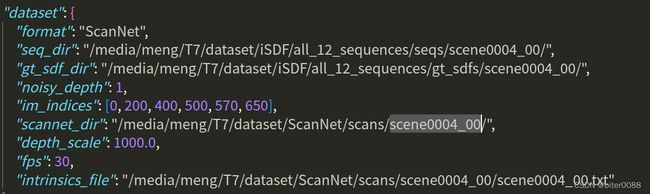
修改xx/iSDF/isdf/train/configs/scannet.json里面scannet_dir和intrinsics_file,具体地址参考前面1.2.3 ScanNet,我这里为:
"scannet_dir": "/media/username/T7/dataset/ScanNet/scans/scene0005_00/",
"intrinsics_file": "/media/username/T7/dataset/ScanNet/scans/scene0005_00/scene0005_00.txt"
开始训练:
cd isdf/train/
python train_vis.py --config configs/scannet.json
训练效果:
报错:/opencv/modules/imgproc/src/color.cpp:182: error: (-215:Assertion failed) !_src.empty() in function ‘cvtColor’
File "/home/username/subject/iSDF/iSDF/isdf/datasets/image_transforms.py", line 14, in __call__
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
cv2.error: OpenCV(4.5.3) /tmp/pip-req-build-afu9cjzs/opencv/modules/imgproc/src/color.cpp:182: error: (-215:Assertion failed) !_src.empty() in function 'cvtColor'

参考:https://github.com/ageitgey/face_recognition/issues/933
应该是函数cv2.cvtColor读到了空图像即前面scannet_dir设置不合理
我这里修改加载scannet数据部分的函数ScanNetDataset()内的源码:
修改文件xx/iSDF/isdf/datasets/dataset.py如下,下面self.root_dir为xxiSDF/isdf/train/configs/scannet.json文件里面scannet_dir,故这里结合自己下载以及导出数据的目录结构,将frame去掉就通了(注:相应地如果在自己下载数据集中增加frames这一集目录结构就不用改代码了)
# self.rgb_dir = os.path.join(root_dir, "frames", "color/")
# self.depth_dir = os.path.join(root_dir, "frames", "depth/")
print("调试 self.root_dir",self.root_dir) #hxz
self.rgb_dir = os.path.join(root_dir, "color/") #hxz
self.depth_dir = os.path.join(root_dir, "depth/") #hxz
(2)其他数据序列
修改xx/iSDF/isdf/train/configs/scannet.json里面seq_dir,gt_sdf_dir,scannet_dir,intrinsics_file等处。
有个这些序列数据量比较大,点击等待,稍等一会即可
scene0031_00数据序列
scene0009_00数据序列,箭头所指位置为洗手间镜子反射造成的
scene0010_00数据序列及对应的真值
scene0004_00数据序列
1.4 训练步骤报错
(1) import不到其他文件夹下面的内容
如果训练时报错:import不到其他文件夹下面的内容,请检查1.1步的pip install -e .是否执行了
(2) 找不到包的报错
ModuleNotFoundError: No module named 'pyglet'----pip install pyglet
ModuleNotFoundError: No module named 'trimesh'----pip install trimesh
ModuleNotFoundError: No module named 'urdfpy'----pip install urdfpy
(3) reload(sys)报错—可以上网搜,针对自己电脑情况进行修改
NameError: name 'reload' is not defined
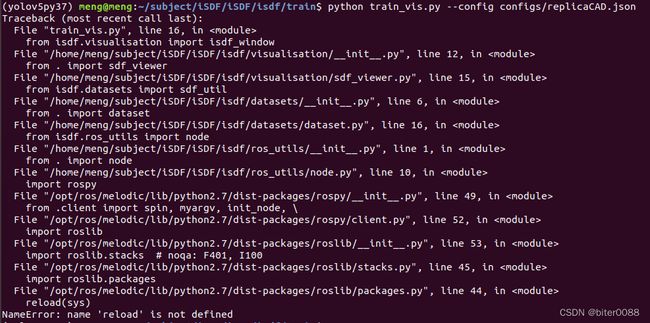
解决:
sudo gedit /opt/ros/melodic/lib/python2.7/dist-packages/roslib/packages.py
我运行的python环境为python3.7,对应修改为:
import sys
import importlib
importlib.reload(sys)
(4) AttributeError: 'open3d.cuda.pybind.visualization.gui.Application' object has no attribute 'add_font'
是open3d版本原因,按照environment.yml要求的0.14.1版本重新安装,参考命令如下:
正常安装:
pip install open3d==0.14.1
conda install open3d==0.14.1
使用发行open3d的一些机构安装:
conda install -c open3d-admin open3d=0.14.1
conda install -c tiledb open3d=0.14.1
使用清华源安装
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple open3d==0.14.1
(5) 设置了导致在终端无法pip安装包
在~/.bashrc文件中将对应位置注释掉,并source ~/.bashrc一下,我这里注释位置为:
#export HTTP_PROXY="http://127.0.0.1:15732"
#export HTTPS_PROXY="http://127.0.0.1:15732"
(注:需要终端时再改回去)
(6) TypeError: clamp(): argument ‘min‘ (position 2) must be Number, not Tensor
原因:pytorch在1.9.0版本之前不允许使用tensor作为min参数,1.9.0及之后的版本允许。
更新pytorch版本,可能需要对应更新cuda、cudnn版本
解决方案:https://blog.csdn.net/BIT_HXZ/article/details/127604680;https://blog.csdn.net/BIT_HXZ/article/details/127604530
(7) X Error of failed request: GLXBadFBConfig
原因:open3d和OpenGL版本冲突,更新OpenGL版本即可
解决方案:https://blog.csdn.net/BIT_HXZ/article/details/127599976
X Error of failed request: GLXBadFBConfig
Major opcode of failed request: 151 (GLX)
Minor opcode of failed request: 34 ()
Serial number of failed request: 33
Current serial number in output stream: 31
1.5 SDF 精度图绘制(SDF accuracy plots)
作者提供了生成比较iSDF和两个对照的SDF误差、碰撞成本误差和梯度余弦距离的图的脚本。这个脚本被用来生成论文中的所有定量图(例如图8)。
注意:这里使用的数据是作者训练的结果,是xx/iSDF/isdf/eval/figs/all_seq.py代码中isdf_dir指向的位置xxF/iSDF/results/iSDF/exp0/,在上面1.0 下载代码时一并被下载了。
修改文件:xx/iSDF/isdf/eval/plot_utils.py
# eval_pts_dir = "/home/joe/projects/incSDF/incSDF/data/eval_pts/vox/"
eval_pts_dir = "xx/iSDF/data/eval_pts/vox/" #hxz
修改文件:xx/iSDF/isdf/eval/figs/all_seq.py,在results前增加一个/
# save_dir = incSDF_root + "results/figs/all_seq_plots/"
save_dir = incSDF_root + "/results/figs/all_seq_plots/" ##hxz
python isdf/eval/figs/all_seq.py
在xx/iSDF/results/figs/all_seq_plots文件夹下保存

报错与解决:ModuleNotFoundError: No module named 'git'----pip install itpython
1.6 重现实验(Reproducing experiments)
在无头模式(headless mode)下按顺序运行一批iSDF实验。要运行这些实验,你必须使用我们的bash脚本下载所有12个序列,以及单独下载和导出ScanNet序列。为了只运行ReplicaCAD序列,你可以修改batch_utils.py中的load_params函数。如果你有多个GPU,你可能想把实验运行并行化。请确保在运行前更新job_local.py中的project_dir和scannet_dir。
(1)重现实验流程说明
训练
cd isdf/train
python batch_train/jobs_local.py
会在这个文件夹xx/iSDF/results/iSDF/10-31-22_11-13-19下产生一个以时间为名称的结果保存目录:

结果绘制SDF精度图:
修改:xx/iSDF/isdf/eval/figs/all_seq.py文件中如下语句:
# isdf_dir = incSDF_root + "/results/iSDF/exp0/"#hxz
isdf_dir = incSDF_root + "/results/iSDF/10-31-22_11-13-19/" #hxz
运行xx/iSDF/isdf/eval/figs/all_seq.py脚本:python isdf/eval/figs/all_seq.py
(2)重现实验2
所有数据序列
参考:1.3.2 ScanNet数据序列, 1.2.3 ScanNet中的数据序列目录
修改:xx/iSDF/isdf/train/batch_train/jobs_local.py中scannet_root:
# scannet_root = "/mnt/sda/ScanNet/" #
scannet_root = "/media/username/T7/dataset/ScanNet/"#hxz
训练过程中显卡存储报错:
RuntimeError: CUDA out of memory. Tried to allocate 178.00 MiB (GPU 0; 7.77 GiB total capacity; 5.63 GiB already allocated; 74.19 MiB free; 6.68 GiB reserved in total by PyTorch) If reserved memory is >> allocated memory try setting max_split_size_mb to avoid fragmentation.
从终端打印输出来看,应该是同时训练的数据序列太多;此外,从终端输出看每个序列都是单独计算损失值的。故可以将批量训练改为单独训练,最后再将单独训练的结果合并到一个文件夹下
前三个数据序列
修改xx/iSDF/isdf/train/batch_train/batch_utils.py,这里先训练前三个序列,其余6个先删除(做好备份)
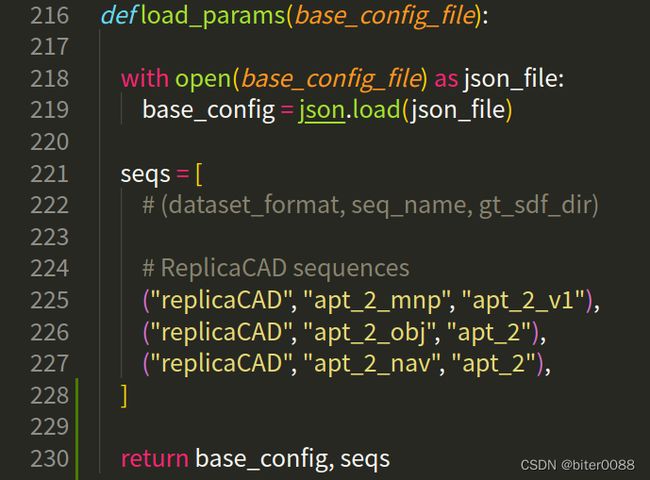
可以看出:一个数据序列训练十组,共30个实验
还是报错:
RuntimeError: CUDA out of memory. Tried to allocate 172.00 MiB (GPU 0; 7.77 GiB total capacity; 5.41 GiB already allocated; 112.19 MiB free; 6.65 GiB reserved in total by PyTorch) If reserved memory is >> allocated memory try setting max_split_size_mb to avoid fragmentation.
前1个数据序列–即apt_2_mnp数据序列


第2个数据序列–即apt_2_obj数据序列

第3个数据序列–即apt_2_nav数据序列

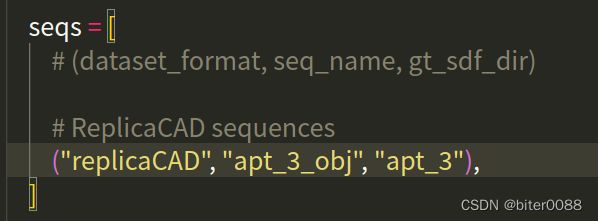
第4个数据序列–即apt_3_mnp数据序列
第一次运行python batch_train/jobs_local.py报了下面的显卡显存不足,自己觉得一个数据序列而已,再次运行(全称盯着。。。)就没报错了,无语。一种可能是,在上一次执行脚本jobs_local.py刚结束,就换了个数据继续执行,显卡休息时间短,可以晚一会;以及执行jobs_local.py脚本的时候,尽量少运行其他程序。
RuntimeError: CUDA out of memory. Tried to allocate 170.00 MiB (GPU 0; 7.77 GiB total capacity; 5.26 GiB already allocated; 84.19 MiB free; 6.67 GiB reserved in total by PyTorch) If reserved memory is >> allocated memory try setting max_split_size_mb to avoid fragmentation.
第5个数据序列–即apt_3_obj数据序列
第6个数据序列–即apt_3_nav数据序列–显存不足

报错:
RuntimeError: CUDA out of memory. Tried to allocate 170.00 MiB (GPU 0; 7.77 GiB total capacity; 5.26 GiB already allocated; 84.19 MiB free; 6.67 GiB reserved in total by PyTorch) If reserved memory is >> allocated memory try setting max_split_size_mb to avoid fragmentation.
查找batch_size的作用,查到xx/iSDF/isdf/geometry/transform.py的backproject_pointclouds()函数,发现 batch_size = depths.shape[0]即batch_size值为深度图像的高度。结合下图知batch_size为680
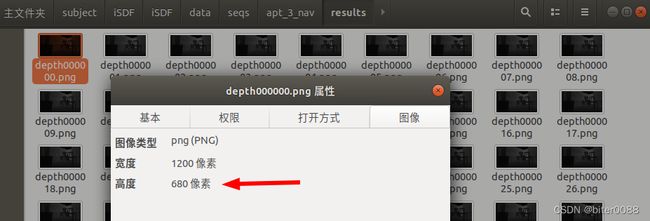
这里强行减半,在xx/iSDF/isdf/geometry/transform.py中修改如下:
# batch_size = depths.shape[0] #hxz
print("执行到此函数 hxz")
batch_size = 100 #hxz
修改无效,注意改回去
此数据序列先放弃
第10个数据序列–即scene0004_00数据序列
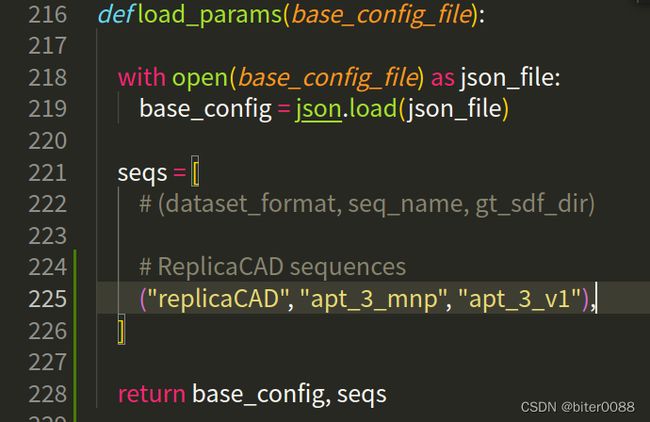
修改:xx/iSDF/isdf/train/batch_train/batch_utils.py的base_config_file
# base_config_file = project_dir + "/isdf/train/configs/replicaCAD.json"
base_config_file = project_dir + "/isdf/train/configs/scannet.json" #hxz
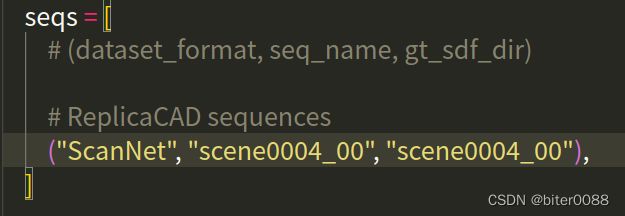
同时修改/isdf/train/configs/scannet.json,将seq_dir,scannet_dir,gt_sdf_dir,intrinsics_file都修改为scene0004_00对应的,如下所示:
报错:cv2.error: OpenCV(4.5.3) /tmp/pip-req-build-afu9cjzs/opencv/modules/imgproc/src/color.cpp:182: er
修改xx/iSDF/isdf/datasets/dataset.py文件class SceneCache(Dataset)里面的内容,去掉frames
# depth_file = root_dir + "/frames/depth/" + str(idx) + ".png" #hxz
# rgb_file = root_dir + "/frames/color/" + str(idx) + col_ext #hxz
depth_file = root_dir + "/depth/" + str(idx) + ".png" #hxz
rgb_file = root_dir + "/color/" + str(idx) + col_ext #hxz
第11个数据序列–即scene0005_00数据序列
修改/isdf/train/configs/scannet.json,将seq_dir,scannet_dir,gt_sdf_dir,intrinsics_file都修改为scene0005_00对应的
第12个数据序列–即scene0009_00数据序列

修改/isdf/train/configs/scannet.json,将seq_dir,scannet_dir,gt_sdf_dir,intrinsics_file都修改为scene0009_00对应的
第9个数据序列–即scene0031_00数据序列–显存不足
修改/isdf/train/configs/scannet.json,将seq_dir,scannet_dir,gt_sdf_dir,intrinsics_file都修改为scene0031_00对应的
报错:RuntimeError: CUDA out of memory. Tried to allocate 164.00 MiB (GPU 0; 7.77 GiB total capacity; 5.44 GiB already allocated; 16.19 MiB free; 6.89 GiB reserved in total by PyTorch) If reserved memory is >> allocated memory try setting max_split_size_mb to avoid fragmentation.
原因应该是:scene0031_00属于长数据序列,而前面的scene0004_00、scene0005_00、scene0009_00属于短数据序列
尝试修改:xx/iSDF/isdf/train/batch_train/jobs_local.py的runs_per_seq (每个数据序列运行多少次/使用多少次):从10修改到5
config_files, save_paths = batch_utils.create_configs_nruns(
base_config_file,
data_dir,
scannet_root,
save_root,
# runs_per_seq=10, #hxz
runs_per_seq=5, #hxz
save_slices=False
)
这样就只输出5个结果结果目录

还是报显存错误
(3)绘制SDF精度图
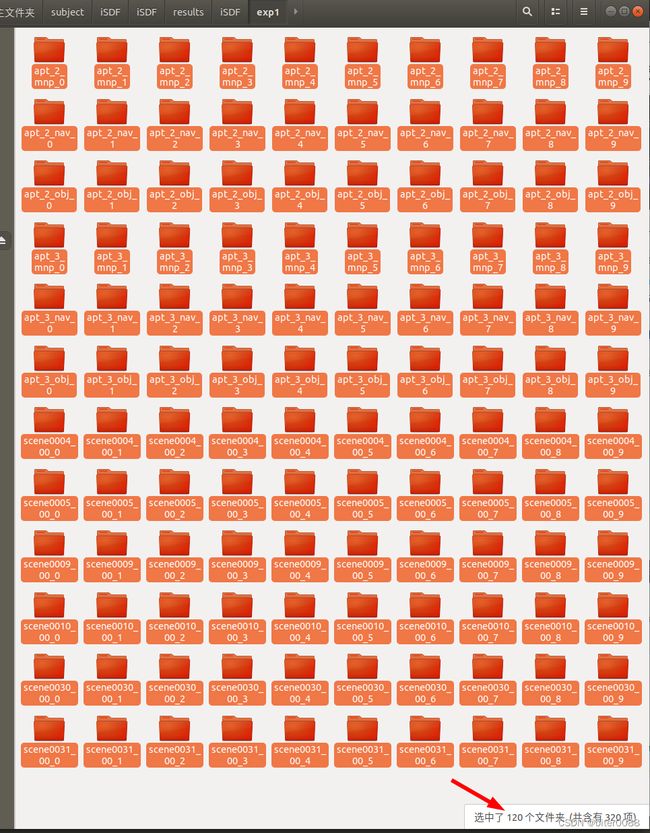
将(2)重现实验2训练的8组数据复制到/iSDF/results/iSDF/exp1内,再从xx/iSDF/iSDF/results/iSDF/exp0将scene00010_00,scene0030_00,scene0031_00,apt_3_nav对应的数据粘贴过来,最后exp1文件夹内容如下(每个数据序列10组):
运行python all_seq.py,结果如下:
(4)比较绘制SDF精度图
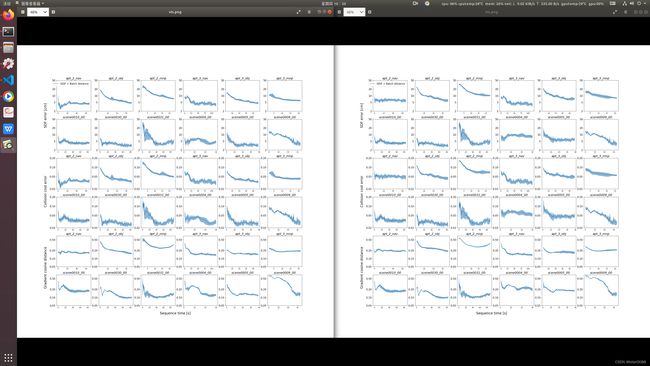
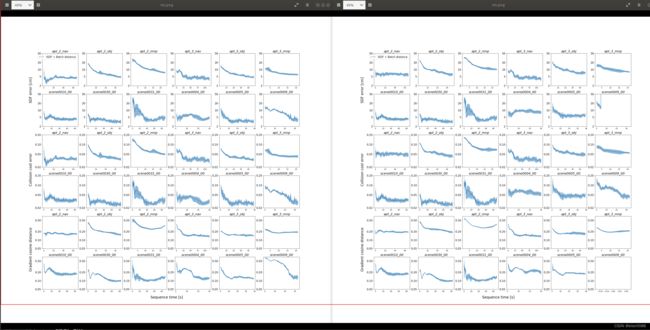
下图左边是作者github上面展示的数据绘制的SDF精度图,右边是自己绘制的SDF精度图,可以看出自己训练的结果与作者 (除scene00010_00,scene0030_00,scene0031_00,apt_3_nav外)还是有比较大的差距的,尤其表现在scene00009_00数据序列
重新单独训练一次scene00009_00数据序列,报错RuntimeError: CUDA out of memory. Tried to allocate 176.00 MiB (GPU 0; 7.77 GiB total capacity; 5.21 GiB already allocated; 80.19 MiB free; 6.83 GiB reserved in total by PyTorch) If reserved memory is >> allocated memory try setting max_split_size_mb to avoid fragmentation. See documentation for Memory Management and ,可能前面侥幸使scene00009_00数据序列训练完成,但训练效果变差
参考(3)绘制SDF精度图将scene00009_00数据序列(只有7组结果)对应的结果从exp0粘贴到exp1
再次绘制SDF精度图:
下图左边是作者github上面展示的数据绘制的SDF精度图,右边是自己绘制的SDF精度图,将自己训练的结果与作者对比 (除scene00010_00,scene0030_00,scene0031_00,apt_3_nav,scene00009_00外),可以看出,自己训练的数据序列几乎都是比作者差的,应该是显卡等硬件设备的问题;但总体上走势还是相似的。