自动驾驶入门(十二):基于Opencv的车道线识别
车道线识别有两种方法:
- 基于Opencv的传统视觉车道线识别方案
- 基于深度学习的车道线识别方案
本文将介绍基于Opencv的传统视觉车道线识别方案。
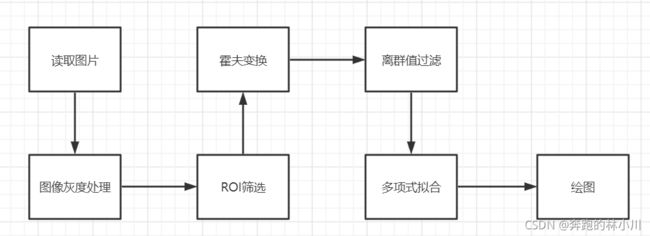
传统的车道线识别解决方案流程图如下:
代码实现如下所示,具体描述 @ 陈光 博主以及 @开水果摊能卖你生瓜蛋已经描述的很清晰了,请直接查看链接
import cv2 as cv
import numpy as np
def region_of_interest(img, vertices):
mask = np.zeros_like(img)
if len(img.shape) > 2:
channel_count = img.shape[2]
ignore_mask_color = (255,)
else:
ignore_mask_color = 255
cv.fillPoly(mask, [vertices], ignore_mask_color)
masked_img = cv.bitwise_and(img, mask)
return masked_img
def calc_slope(line):
x1, y1, x2, y2 = line[0]
return (y2-y1)/(x2-x1)
def line_selection(lines, threshold):
slopes = [calc_slope(line) for line in lines]
while len(lines) > 0:
mean = np.mean(slopes)
diff = [abs(s-mean) for s in slopes]
idx = np.argmax(diff)
if diff[idx] > threshold:
slopes.pop(idx)
lines.pop(idx)
else:
break
# return lines
def least_squres_fit(lines):
x_coords = np.ravel([[line[0][0], line[0][2]] for line in lines])
y_coords = np.ravel([[line[0][1], line[0][3]] for line in lines])
poly = np.polyfit(x_coords, y_coords, deg=1)
point_min = (np.min(x_coords), np.polyval(poly, np.min(x_coords)))
point_max = (np.max(x_coords), np.polyval(poly, np.max(x_coords)))
return np.array([point_min, point_max], dtype=np.int)
if __name__ == '__main__':
img_path = r'C:\Users\HP\Pictures\lane.png'
img = cv.imread(img_path, cv.IMREAD_COLOR)
gray = cv.cvtColor(img, cv.COLOR_RGB2GRAY)
low_threshold = 150
high_threshold = 300
canny_img = cv.Canny(gray, low_threshold, high_threshold)
# cut interested img
left_bottom = [0, canny_img.shape[0]]
right_bottom = [canny_img.shape[1]-60, canny_img.shape[0]]
apex = [canny_img.shape[1]/2, 120]
vertices = np.array([left_bottom, right_bottom, apex], np.int32)
roi_img = region_of_interest(canny_img, vertices)
# hough lines operation
lines = cv.HoughLinesP(roi_img, 1, theta=np.pi/180, threshold=15, minLineLength=40, maxLineGap=20)
# classify the line by slope
left_lines = [line for line in lines if calc_slope(line) > 0]
right_lines = [line for line in lines if calc_slope(line) < 0]
# use threshold to modify the lines to select lines.
print("before operation: {}".format(len(left_lines)))
line_selection(left_lines, threshold=0.1)
line_selection(right_lines, threshold=0.1)
print("after operation: {}".format(len(left_lines)))
left_line = least_squres_fit(left_lines)
right_line = least_squres_fit(right_lines)
cv.line(img, tuple(left_line[0]), tuple(left_line[1]), color=[255, 0, 0], thickness=6)
cv.line(img, tuple(right_line[0]), tuple(right_line[1]), color=[255, 0, 0], thickness=6)
cv.imshow('gray', img)
cv.waitKey(0)
最终展示效果如图:

参考链接:
无人驾驶技术入门(十四)| 初识图像之初级车道线检测 - 知乎
车道线检测 _ 搜索结果_哔哩哔哩_Bilibili
Opencv(四):图像边缘检测_林小川的博客-CSDN博客