阵列信号处理——旋转不变技术(ESPRIT)
ESPRIT是借助旋转不变技术估计信号参数(estimating signal parameter via rotational invariance techniques)方法的英文缩写,最早由Roy等人[233]于1986年提出。ESPRIT方法现已成为现代信号处理中一种代表性方法,并得到了广泛的应用。
和MUSIC方法存在阵元空间和波束空间两类算法一样,ESPRIT方法也有阵元空间E-SPRIT算法和波束空间ESPRIT算法两种类型,并且还有专门针对复观测数据的酉ESPRIT方法。
算法一、基本ESPRIT算法步骤
步骤1、利用已知的观测数据x(1),.....,x(N)估计自协方差函数![]() .
.
步骤2、由估计的自协方差函数构造MxM自协方差矩阵Rxx和MxM互协方差Rxy。
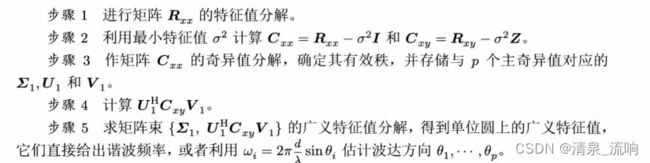
步骤3、求Rxx的特征值分解。对于M>p,最小特征值的平均值作为噪声方差 的估计。
的估计。
步骤4、利用计算Cxx=Rxx-I和Cxy=Rxy-Z。
步骤5、求矩阵束{Cxx,Cxy}的广义特征值分解,得到位于单位圆上的p个广义特征值![]() ,它们直接给出谐波频率wi的估计。然后,利用
,它们直接给出谐波频率wi的估计。然后,利用![]() 估计波
估计波
达方向θ1,…,θp。
Roy和Kailath指出[232],最小二乘算子会导致在求解广义特征值问题的某些潜在的数值困难。现在已广泛认识到,奇异值分解(SVD)和总体最小二乘(TLS)的应用可以将一个较大维数(MxM)病态广义特征问题转化为一个较小维数(p×p)的无病态广义特征问题。
算法二、TLS-ESPRIT算法步骤
TLS-ESPRIT算法matlab仿真实验
TLS-ESPRIT函数程序如下:
function estimate = tls_esprit(dd,cr,Le)
twpi =2.0*pi;
derad = pi / 180.0;
radeg = 180.0 / pi;
%对接收信号协方差矩阵进行特征值分解
[K,KK] = size(cr);
[V,D]=eig(cr);
EVA = real(diag(D)');
[EVA,I] = sort(EVA);
EVA=fliplr(EVA);
EV=fliplr(V(:,I));
%构造E_{xy}和E_xys=E_{xy}HE_{xy}
Exy =[EV(1:K-1,1:Le) EV(2:K,1:Le)];
E_xys = Exy'*Exy;
%对E_xys进行特征值分解
[V,D]=eig(E_xys);
EVA_xys=real(diag(D)');
[EVA_xys,I] =sort(EVA_xys);
EVA_xys=fliplr(EVA_xys);
EV_xys=fliplr(V(:,I));
%将EV_xys分解
Gx = EV_xys(1:Le,Le+1:Le*2);
Gy=EV_xys(Le+1:Le*2,Le+1:Le*2);
%计算Psi=-Gx[Gy]{-1}
Psi = -Gx/Gy;
%对Psi进行特征值分解
[V,D]=eig(Psi);
EGS = diag(D).';
[EGS,I] = sort(EGS);
EGS=fliplr(EGS);
EVS=fliplr(V(:,I));
%估计DOA
ephi = atan2(imag(EGS), real(EGS));
ange = -asin( ephi / twpi / dd ) * radeg;
estimate(1,:)=ange;
%功率估计
T=inv(EVS);
powe = T*diag(EVA(1:Le)-EVA(K))*T';
powe = abs(diag(powe).')/K;
estimate(2,:)=powe;
主函数程序如下:
clear all
close all
derad = pi/180; %角度->弧度
radeg = 180/pi; %弧度->角度
twpi=2*pi;
kelm = 8; %阵元数
dd=0.5; %阵元间距
d=0:dd:(kelm-1)*dd;
iwave = 3; %信源数
theta =[10 20 30]; %波达方向
snr = 10; %信噪比
n=500; %采样数(快拍)
A=exp(-1i*twpi*d.'*sin(theta*derad)); %方向矢量
S=randn(iwave,n ); %信源信号
snr0=0:3:100 ; %信噪比
for isnr=1:10
X0=A*S; %接收信号
X=awgn(X0,snr0(isnr),'measured') ; %添加噪声
Rxx=X*X'/n; %计算协方差矩阵
[EV,D]=eig(Rxx); %特征值分解
EVA=diag(D)';
[EVA,I]=sort(EVA); %特征值从小到大排序
EVA=fliplr(EVA); %左右翻转,从大到小排序
EV=fliplr(EV(:,I)); %对应特征矢量排序
estimates=(tls_esprit(dd,Rxx,iwave)); %调用子程序
doaes(isnr,:)=sort(estimates(1,:));
end
disp(doaes);运行结果如下:

参考文献:
阵列信号处理及MATLAB实现;张小飞,陈华伟,仇小锋(编著)
现代信号处理(第三版);张贤达(编著)