Pytorch笔记-1
what is Pytorch
- 深度学习框架,提供最大的灵活性和速度
- 支持GPU计算能力
Tensors
Tensors 类似于Numpy中的ndarrays,但Tensors能够在GPU上加速计算。
from __future__ import print_function
import torch
# 声明一个未初始化的矩阵
x = torch.empty(5, 3)
print(x)
# 创建一个5*3的零矩阵,dtype设置为long
x = torch.zeros(5, 3, dtype=torch.long)
print(x)
# 基于数据,创建一个矩阵
x = torch.tensor([5.5, 3])
print(x, x.dtype)
# 基于已存在的tensor,创建新的tensor
## 利用new_* 函数,去创建新的tensor,size可以更改,dtype也可以更改
x = x.new_ones(5, 3)
print(x, x.dtype)
x = x.new_ones(5, 3, dtype=torch.double)
print(x)
## size不变,dtype改变
x = torch.rand_like(x, dtype=torch.float)
print(x)
# 获取tensor的大小
print(x.size())
tensor([[4.8674e-39, 8.9082e-39, 8.9082e-39],
[1.0194e-38, 9.1837e-39, 4.6837e-39],
[9.2755e-39, 1.0837e-38, 8.4490e-39],
[1.0194e-38, 9.0919e-39, 8.4490e-39],
[9.6429e-39, 8.4490e-39, 9.6429e-39]])
tensor([[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0],
[0, 0, 0]])
tensor([5.5000, 3.0000]) torch.float32
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]]) torch.float32
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]], dtype=torch.float64)
tensor([[0.6535, 0.1822, 0.2415],
[0.6635, 0.8093, 0.6927],
[0.5346, 0.7273, 0.1211],
[0.5198, 0.7663, 0.9047],
[0.0295, 0.8088, 0.2461]])
torch.Size([5, 3])
Opertions
y = torch.rand(5, 3)
# 第一种方式
print(x + y)
# 第二种方式
print(torch.add(x, y))
# 第三种方式
result = torch.empty(5, 3)
torch.add(x, y, out=result)
print(result)
# 第四种方式,注:以'_'结尾的函数,一般会替换原有值,例子:x_copy_(y), x.t_()等都将改变x
y.add_(x)
print(y)
# tensor的索引切片
print(x)
print(x[:, 1])
# Resizing: reshape/resize tensor
x = torch.randn(4, 4)
y = x.view(16)
z = x.view(-1, 8)
w = x.view(8, -1)
print(x.size(), y.size(), z.size(), w.size())
# 只有一个元素的tensor,使用.item()获取value,即一个数值类型
x = torch.randn(1)
print(x)
print(x.item())
tensor([[0.6727, 1.1430, 0.6668],
[0.9527, 1.0709, 0.9511],
[0.6208, 1.3169, 0.4683],
[0.8150, 0.9228, 1.8305],
[0.7101, 1.7925, 0.8232]])
tensor([[0.6727, 1.1430, 0.6668],
[0.9527, 1.0709, 0.9511],
[0.6208, 1.3169, 0.4683],
[0.8150, 0.9228, 1.8305],
[0.7101, 1.7925, 0.8232]])
tensor([[0.6727, 1.1430, 0.6668],
[0.9527, 1.0709, 0.9511],
[0.6208, 1.3169, 0.4683],
[0.8150, 0.9228, 1.8305],
[0.7101, 1.7925, 0.8232]])
tensor([[0.6727, 1.1430, 0.6668],
[0.9527, 1.0709, 0.9511],
[0.6208, 1.3169, 0.4683],
[0.8150, 0.9228, 1.8305],
[0.7101, 1.7925, 0.8232]])
tensor([[0.6535, 0.1822, 0.2415],
[0.6635, 0.8093, 0.6927],
[0.5346, 0.7273, 0.1211],
[0.5198, 0.7663, 0.9047],
[0.0295, 0.8088, 0.2461]])
tensor([0.1822, 0.8093, 0.7273, 0.7663, 0.8088])
torch.Size([4, 4]) torch.Size([16]) torch.Size([2, 8]) torch.Size([8, 2])
tensor([0.8052])
0.8052219748497009
Numpy Bridge
Torch Tensor和Numpy之间相互转换。
Torch Tensor和Numpy共享内存(Tensor在CPU下),一个改变,另一个也会发生改变。
# Tensor 转换为 Numpy
a = torch.ones(5)
print(a)
b = a.numpy()
print(b)
## 一个改变,另一个也发生改变
a.add_(1)
print(a, b)
# Numpy 转换为 Tensor
import numpy as np
a = np.ones(5)
b = torch.from_numpy(a)
np.add(a, 1, out=a)
print(a, b)
tensor([1., 1., 1., 1., 1.])
[1. 1. 1. 1. 1.]
tensor([2., 2., 2., 2., 2.]) [2. 2. 2. 2. 2.]
[2. 2. 2. 2. 2.] tensor([2., 2., 2., 2., 2.], dtype=torch.float64)
CUDA Tensors
Tensor可以被转移到任何device上,只需要使用.to方法就可以。
# 利用torch.device对象,将tensors移入到GPU上或者移出GPU
if torch.cuda.is_available():
# cuda device 对象
device = torch.device('cuda')
# 直接在gpu上创建tensor
y = torch.ones_like(x, device=device)
# 将cpu上的tensor移入到gpu
x =x.to(device)
z = x + y
print(z)
# 将GPU上的tensor转移到cpu
print(z.to('cpu', torch.double))
tensor([1.8052], device='cuda:0')
tensor([1.8052], dtype=torch.float64)
AutoGrad: Automatic Differentiation
Pytorch中所有神经网络的核心就是autograd包。对tensor所有运算,autograd能够自动求导。它是一个define-by-run 框架,意味着反向传播由你的代码定义,并且每一次迭代都可以不同。
torch.Tensor的属性.requires_grad如果设置为True,它将会跟踪在其上面的所有运算。当你完成自己运算,你可以利用.backward(),然后所有的梯度将会自动计算,这个Tensor的梯度通过.grad可以获取。
如果在跟踪tensor的历史运算中,停止跟踪某一运算,可以使用.detach()方法。也可以使用代码块with torch.no_grad():,这是非常有用的,当可训练参数requires_grad=True时,而我们不需要某个梯度时,就可以这么做。
每个tensor都有.grad_fn属性,而叶子点(用户自己定义的tensor)的属性grad_fn is None,以及tensor的.requires_grad为False时,其grad_fn is None;否则,.grad_fn属性就是运算的Function。
Tensors的属性
import torch
# 创建tensor,设置requires_grad=True,将会跟踪该tensor的所有的运算
x = torch.ones(2, 2, requires_grad=True)
print(x)
# 做一个tensor运算
y = x + 2
print(y)
# y作为运算后的tensor被创建,其属性grad_fn
print(y.grad_fn)
# x作为叶子点,其属性grad_fn是None4
print(x.grad_fn)
tensor([[1., 1.],
[1., 1.]], requires_grad=True)
tensor([[3., 3.],
[3., 3.]], grad_fn=)
None
a = torch.randn(2, 2)
a = ((a * 3) / (a - 1))
print(a.requires_grad) # False
# 将tensor的requires_grad属性设置为True
a.requires_grad_(True)
print(a.requires_grad)
b = (a * a).sum()
print(b.grad_fn)
False
True
Gradients
x = torch.ones(2, 2, requires_grad=True)
y = x + 2
z = y * y * 3
out = z.mean()
print(z, out)
# 反向传播,out是一个scalar,那么out.backward()等价于out.backward(torch.tensor(1.))
out.backward()
# 求梯度 d(out)/d(x)
print(x.grad)
# y 不是一个scalar,那么反向传播y.backward()中的参数必须设置和y的大小一样
x = torch.randn(3, requires_grad=True)
y = x * 2
while y.data.norm() < 1000:
y = y * 2
print(y)
y.backward(torch.tensor([1, 1, 1], dtype=torch.float))
print(x.grad)
tensor([[27., 27.],
[27., 27.]], grad_fn=) tensor(27., grad_fn=)
tensor([[4.5000, 4.5000],
[4.5000, 4.5000]])
tensor([-297.3523, 1063.2278, 114.6286], grad_fn=)
tensor([1024., 1024., 1024.])
# 对tensor(当.requires_grad=True时)的跟踪历史,停止跟踪某一运算。
print(x.requires_grad) # True
print((x**2).requires_grad) # True
with torch.no_grad():
print((x**2).requires_grad) # False
# 使用.detach(),停止跟踪
print(x.requires_grad) # True
y = (x**2).detach()
print(y.requires_grad) # False
True
True
False
True
False
Neural Networks
利用torch.nn包构建神经网络。nn依赖于autograd包来定义模型,但不同于autograd。
nn.Module包含layers,以及方法forward(input),然后返回output。
例子:数字图片分类

这是一个简单的前馈神经网络,包含若干个layers,前后连接,输入input,最终输出output。
- 定义(可学习参数)神经网络
- 输入数据(一个batch的遍历)
- 数据在神经网络中process
- 计算损失函数
- 反向传播,计算梯度
- 更新可学习参数,即weight。典型的更新规则:
weight = weight - learning_rate * gradient
Define the network
import torch
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# 1 input image channel, 6 output channels, 3x3 square convolution kernel
self.conv1 = nn.Conv2d(1, 6, 3)
self.conv2 = nn.Conv2d(6, 16, 3)
self.fc1 = nn.Linear(16*6*6, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = F.relu(self.conv1(x))
print('conv1:', x.size())
# Max pooling over a (2, 2) window
x = F.max_pool2d(x, (2, 2))
print('pool1', x.size())
x = F.relu(self.conv2(x))
print('conv2:', x.size())
# If the size is a square you can only specify a single number
x = F.max_pool2d(x, 2)
print('pool2:', x.size())
x = x.view(-1, self.num_flat_features(x))
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
def num_flat_features(self, x):
# all dimensions except the batch dimension
size = x.size()[1: ]
num_features = 1
for s in size:
num_features *= s
return num_features
net = Net()
print(net)
Net(
(conv1): Conv2d(1, 6, kernel_size=(3, 3), stride=(1, 1))
(conv2): Conv2d(6, 16, kernel_size=(3, 3), stride=(1, 1))
(fc1): Linear(in_features=576, out_features=120, bias=True)
(fc2): Linear(in_features=120, out_features=84, bias=True)
(fc3): Linear(in_features=84, out_features=10, bias=True)
)
params = list(net.parameters())
print(len(params))
# conv1's weight
print(params[0].size())
10
torch.Size([6, 1, 3, 3])
# input 随机生成1*32*32的图片
input = torch.randn(1, 1, 32, 32)
# 前向传播
out = net(input)
print(out)
conv1: torch.Size([1, 6, 30, 30])
pool1 torch.Size([1, 6, 15, 15])
conv2: torch.Size([1, 16, 13, 13])
pool2: torch.Size([1, 16, 6, 6])
tensor([[ 0.0353, 0.0761, -0.0565, -0.0780, 0.0075, -0.0527, 0.0095, -0.0354,
0.0399, -0.0458]], grad_fn=)
# 所有参数的梯度归零,不然反向传播后,梯度会基于the existing gradients进行累加。
net.zero_grad()
# 反向传播随机梯度系数
out.backward(torch.randn(1, 10))
注:
torch.nn只支持mini-batches of sample,不支持single sample。nn.Conv2d需要4D Tensor,大小是nSamples × nChannels × Height × width。- 如果你有single sample,仅需要
input.unsqueeze(0)操作,添加一个fake batch dimension。
Loss Function
损失函数需要(output, target),计算一个值,用来评估output和target的距离。在nn包下有需要不同的loss function,比如:nn.MSELoss
input = torch.randn(1, 1, 32, 32)
output = net(input)
# fake example,自己设置目标值,正常有真实数据情况下,这些标签都是有的。
target = torch.randn(10)
# target的shape保持和output的shape一样
target = target.view(1, -1)
print(target)
# 建立MSELoss损失函数对象
criterion = nn.MSELoss()
# 返回MSELoss损失函数根据output和target,获取的值
loss = criterion(output, target)
print(loss)
conv1: torch.Size([1, 6, 30, 30])
pool1 torch.Size([1, 6, 15, 15])
conv2: torch.Size([1, 16, 13, 13])
pool2: torch.Size([1, 16, 6, 6])
tensor([[ 1.0337e+00, -5.6170e-01, 3.7140e-01, -6.9811e-01, 7.8860e-01,
-1.5017e+00, 2.2199e+00, 1.5598e-01, 4.4258e-01, -2.2088e-03]])
tensor(0.9772, grad_fn=)
# 查看一些属性
print(loss.grad_fn)
print(loss.grad_fn.next_functions[0][0]) # Linear
print(loss.grad_fn.next_functions[0][0].next_functions[0][0]) # Relu
BackProp
使用loss.backward()进行反向传播。必须先clear the existing gradients,否则the existing gradients将会逐渐累加
# 所有参数的梯度归零
net.zero_grad()
print('conv1.bias.grad before backward')
print(net.conv1.bias.grad)
loss.backward()
print('conv1.bias.grad after backward')
print(net.conv1.bias.grad)
conv1.bias.grad before backward
tensor([0., 0., 0., 0., 0., 0.])
conv1.bias.grad after backward
tensor([-0.0320, -0.0230, -0.0095, 0.0117, -0.0098, 0.0429])
Update the weights
最简单的更新方法,使用随机梯度下降法(SGD):weight = weight - learning_rate * gradient。
# 第一种方法,我们用Python code去实现
learning_rate = 0.01
for f in net.parameters():
f.data.sub_(f.grad.data * learning_rate)
然而,除了SGD,还有Nesterov-SGD,Adam,RMSProp等。因此pytorch中,构建了torch.optim模块,来实现这些方法。
# 第二种方法,利用optim模块
import torch.optim as optim
# 创建optimizer
optimizer = optim.SGD(net.parameters(), lr=0.01)
# 所有参数的梯度归零, 同net.zero_grad()一样的功能
optimizer.zero_grad()
output = net(input)
loss = criterion(output, target)
loss.backward()
# update weights
optimizer.step()
conv1: torch.Size([1, 6, 30, 30])
pool1 torch.Size([1, 6, 15, 15])
conv2: torch.Size([1, 16, 13, 13])
pool2: torch.Size([1, 16, 6, 6])
Training a classifier
一般来说 ,当你处理图片,文本或者视频数据,你可能需要python标准库去加载数据,转换为numpy array数据类型。你可以转换array为torch.*Tensor.
- 图片,Pillow、OpenCV
- 视频,scipy、librosa
- 文本,NLTK、SpaCy
对于pytorch,我们经常用torchvision,进行一些数据加载和数据转换的操作。
本小节,我们将会用CIFAR10数据集。主要类标签: ‘airplane’, ‘automobile’, ‘bird’, ‘cat’, ‘deer’, ‘dog’, ‘frog’, ‘horse’, ‘ship’, ‘truck’。CIFAR10中图片大小33232。

训练图片分类器,将按照以下步骤:
- 使用
torchvision加载和标准化数据 - 定义卷积神经网络
- 定义损失函数
- 在训练集上训练
- 在测试集上测试
Loading and normalizing CIFAR10
import torch
import torchvision
import torchvision.transforms as transforms
# 构建数据转换器
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])
# 在线下载图片数据,并利用数据转换器进行处理
trainset = torchvision.datasets.CIFAR10(root='./data',
train=True,
download=True,
transform=transform)
# 将数据batch处理
trainloader = torch.utils.data.DataLoader(trainset,
batch_size=4,
shuffle=True,
num_workers=2)
testset = torchvision.datasets.CIFAR10(root='./data', train=False,
download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4,
shuffle=False, num_workers=2)
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
Files already downloaded and verified
Files already downloaded and verified
# 查看下训练集的图片
import matplotlib.pyplot as plt
import numpy as np
def imshow(img):
img = img/2 + 0.5 # 非标准化
nping = img.numpy() # 转换为numpy array
plt.imshow(np.transpose(nping, (1, 2, 0)))
plt.show()
# 获取训练集图片
dataiter = iter(trainloader)
images, labels = dataiter.next()
# 展示图片,make_grid的作用是将若干幅图像拼成一幅图像
imshow(torchvision.utils.make_grid(images))
# 打印标签
print(' \t'.join('%5s' % classes[labels[j]] for j in range(4)))

deer ship horse deer
Define a Convolutional Neural Network
import torch.nn as nn
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16*5*5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16*5*5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
Define a Loss function and optimizer
import torch.optim as optim
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
Train the network
for epoch in range(2): # loop over the dataset multiple times
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
inputs, labels = data
# zero the parameter gradients
optimizer.zero_grad()
# forward
outputs = net(inputs)
loss = criterion(outputs, labels)
# backward
loss.backward()
# optimize
optimizer.step()
# 每批batch的损失函数累加
running_loss += loss.item()
if i % 2000 == 1999:
print('[%d, %5d] loss: %.3f' % (epoch+1, i+1, running_loss/2000))
running_loss = 0.0
print('Finished Training')
[1, 2000] loss: 2.171
[1, 4000] loss: 1.799
[1, 6000] loss: 1.655
[1, 8000] loss: 1.556
[1, 10000] loss: 1.501
[1, 12000] loss: 1.455
[2, 2000] loss: 1.377
[2, 4000] loss: 1.382
[2, 6000] loss: 1.338
[2, 8000] loss: 1.321
[2, 10000] loss: 1.301
[2, 12000] loss: 1.278
Finished Training
# 保存训练模型
PATH = './cifar_net.pth'
torch.save(net.state_dict(), PATH)
Test the network on the test data
dataiter = iter(testloader)
images, labels = dataiter.next()
# print images
imshow(torchvision.utils.make_grid(images))
print('GroundTruth: ', ' '.join('%5s' % classes[labels[j]] for j in range(4)))

GroundTruth: cat ship ship plane
# 对测试集预测
outputs = net(images)
_, predicted = torch.max(outputs, 1)
print('Predicted: ', ' '.join('%5s'%classes[predicted[j]] for j in range(4)))
Predicted: cat ship ship plane
# 重新加载模型文件,对测试集进行预测
net = Net()
net.load_state_dict(torch.load(PATH))
outputs = net(images)
_, predicted = torch.max(outputs, 1)
print('Predicted: ', ' '.join('%5s'%classes[predicted[j]] for j in range(4)))
Predicted: cat ship ship plane
# 针对所有的数据集进行预测和评估
correct = 0
total = 0
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print('Accuracy of the network on the 10000 test images: %d %%' % (100*correct/total))
Accuracy of the network on the 10000 test images: 55 %
# 针对具体的类,其预测效果如何
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
with torch.no_grad():
for data in testloader:
images, labels = data
outputs = net(images)
_, predicted = torch.max(outputs, 1)
c = (predicted == labels).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += c[i].item()
class_total[label] += 1
for i in range(10):
print('Accuracy of %5s : %2d %%' % (classes[i], 100*class_correct[i]/class_total[i]))
Accuracy of plane : 69 %
Accuracy of car : 79 %
Accuracy of bird : 21 %
Accuracy of cat : 22 %
Accuracy of deer : 43 %
Accuracy of dog : 57 %
Accuracy of frog : 77 %
Accuracy of horse : 67 %
Accuracy of ship : 54 %
Accuracy of truck : 63 %
Training on GPU
# 查看下自己的设备是否支持GPU
device = torch.device("cuda:0" if torch.cuda.is_available() else 'cpu')
print(device)
cuda:0
# 将神经网络模型转移到GPU上
net.to(device)
# 将数据转移到GPU上
inputs, labels = data[0].to(device), data[1].to(device)
Learning Pytorch with examples
基于一些简单的例子,对numpy和tensors分别构建神经网络进行对比。
warm-up: numpy
# -*- coding: utf-8 -*-
import numpy as np
# N: batch size, D_in: input dimenesion
# H: hidden dimension,D_out: out dimension
N, D_in, H, D_out = 64, 1000, 100, 10
# create random input and outtput data
x = np.random.randn(N, D_in)
y = np.random.randn(N, D_out)
# randomly initialize weights
w1 = np.random.randn(D_in, H)
w2 = np.random.randn(H, D_out)
learning_rate = 1e-6
for t in range(500):
# foward
h = x.dot(w1)
h_relu = np.maximum(h, 0)
y_pred = h_relu.dot(w2)
# loss
loss = np.square(y_pred - y).sum()
# print(t, loss)
# backprop
grad_y_pred = 2.0 * (y_pred - y)
grad_w2 = h_relu.T.dot(grad_y_pred)
grad_h_relu = grad_y_pred.dot(w2.T)
grad_h = grad_h_relu.copy()
grad_h[h < 0] = 0
grad_w1 = x.T.dot(grad_h)
# update weights
w1 -= learning_rate * grad_w1
w2 -= learning_rate * grad_w2
Pytorch: tensors
# -*- coding: utf-8 -*-
import torch
dtype = torch.float
device = torch.device("cpu")
# device = torch.device("cuda:0") # Uncomment this to run on GPU
# N is batch size; D_in is input dimension;
# H is hidden dimension; D_out is output dimension.
N, D_in, H, D_out = 64, 1000, 100, 10
# Create random input and output data
x = torch.randn(N, D_in, device=device, dtype=dtype)
y = torch.randn(N, D_out, device=device, dtype=dtype)
# Randomly initialize weights
w1 = torch.randn(D_in, H, device=device, dtype=dtype)
w2 = torch.randn(H, D_out, device=device, dtype=dtype)
learning_rate = 1e-6
for t in range(500):
# Forward
h = x.mm(w1)
# tensor.clamp(min=p, max=q),表示tensor每在小于p的值,给它替换为p;大于q的值,替换为q;其他不变。
h_relu = h.clamp(min=0)
y_pred = h_relu.mm(w2)
# loss
loss = (y_pred - y).pow(2).sum().item()
if t % 100 == 99:
print(t, loss)
# backprop
grad_y_pred = 2.0 * (y_pred - y)
grad_w2 = h_relu.t().mm(grad_y_pred)
grad_h_relu = grad_y_pred.mm(w2.t())
# clone函数相当于深拷贝,等同于copy()
grad_h = grad_h_relu.clone()
grad_h[h < 0] = 0
grad_w1 = x.t().mm(grad_h)
# 更新weights
w1 -= learning_rate*grad_w1
w2 -= learning_rate*grad_w2
99 725.5035400390625
199 6.171583652496338
299 0.0905323326587677
399 0.0018679401837289333
499 0.00015406067541334778
Autograd
# -*- coding: utf-8 -*-
import torch
dtype = torch.float
device = torch.device('cpu')
# N: batch size, D_in: input dimenesion
# H: hidden dimension,D_out: out dimension
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in, device=device, dtype=dtype)
y = torch.randn(N, D_out, device=device, dtype=dtype)
# 注意:与上面代码不同之处 requires_grad=True,主要是使用autograd,构建计算图后自动求导,进行tracking history
w1 = torch.randn(D_in, H, device=device, dtype=dtype, requires_grad=True)
w2 = torch.randn(H, D_out, device=device, dtype=dtype, requires_grad=True)
learning_rate = 1e-6
for t in range(500):
# forward
y_pred = x.mm(w1).clamp(min=0).mm(w2)
# loss
loss = (y_pred - y).pow(2).sum()
if t%100 == 99:
print(t, loss.item())
# backward
loss.backward()
# wrap in torch.no_grad(), because Weights have requires_grad=True, but we don't need to track this
# in autograd.
with torch.no_grad():
w1 -= learning_rate * w1.grad
w2 -= learning_rate * w2.grad
# zero the gradients after updating weights
w1.grad.zero_()
w2.grad.zero_()
99 701.320068359375
199 4.477272987365723
299 0.044173479080200195
399 0.0007534730830229819
499 7.956846820889041e-05
Pytorch: Defining new autograd functions
定义torch.autograd.Function的子类,作为function对象,能够在前向传播和后向传播中运算。
# -*- coding: utf-8 -*-
import torch
class MyReLU(torch.autograd.Function):
"""
ctx is a context object that can be used
to stash(隐藏) information for backward computation。
You can cache arbitrary objects for use in the backward pass
using the ctx.save_for_backward method(利用ctx.save_for_backward可以缓存任何对象,从而用在backward computations)
"""
@staticmethod
def forward(ctx, input):
# input 缓存起来
ctx.save_for_backward(input)
return input.clamp(min=0)
@staticmethod
def backward(ctx, grad_output):
# backward时,input 再拿出来
input, = ctx.saved_tensors
grad_input = grad_output.clone()
grad_input[input<0] = 0
return grad_input
dtype = torch.float
device = torch.device('cpu')
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in, device=device, dtype=dtype)
y = torch.randn(N, D_out, device=device, dtype=dtype)
w1 = torch.randn(D_in, H, device=device, dtype=dtype, requires_grad=True)
w2 = torch.randn(H, D_out, device=device, dtype=dtype, requires_grad=True)
learning_rate = 1e-6
for t in range(500):
# to apply our Function, we use Function.apply method. we alias this as 'relu'
relu = MyReLU.apply
# Forward
y_pred = relu(x.mm(w1)).mm(w2)
# loss
loss = (y_pred - y).pow(2).sum()
if t % 100 == 99:
print(t, loss.item())
# backward
loss.backward()
# update weights
with torch.no_grad():
w1 -= learning_rate * w1.grad
w2 -= learning_rate * w2.grad
# Manually zero the gradients after updating weights
w1.grad.zero_()
w2.grad.zero_()
99 392.440673828125
199 1.3885456323623657
299 0.007697926368564367
399 0.00017928658053278923
499 3.0681290809297934e-05
Pytorch: nn
nn包定义了一系列Modules,相同于神经网络结构的layers。当然,nn包也定义了一系列损失函数。
# -*- coding: utf-8 -*-
import torch
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
# 利用nn包定义我们自己的model,作为 a sequence of layers。
# nn.Sequential是一个Module,其可以包含other Modules
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
torch.nn.Linear(H, D_out),
)
# MSE loss
loss_fn = torch.nn.MSELoss(reduction='sum')
learning_rate = 1e-4
for t in range(500):
y_pred = model(x)
loss = loss_fn(y_pred, y)
if t % 100 == 99:
print(t, loss.item())
# 比起上面的例子,这个是新增的,因为模型构建后grad会被随机初始化,需要归置为0
model.zero_grad()
loss.backward()
# update the weights
with torch.no_grad():
for param in model.parameters():
param -= learning_rate * param.grad
99 1.8741734027862549
199 0.025903530418872833
299 0.0006964506465010345
399 2.3446677005267702e-05
499 8.755716862651752e-07
Pytorch: optim
optimizers常用的有AdaGrad, RMSProp, Adam等。
# -*- coding: utf-8 -*-
import torch
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
model = torch.nn.Sequential(
torch.nn.Linear(D_in, H),
torch.nn.ReLU(),
torch.nn.Linear(H, D_out),
)
loss_fn = torch.nn.MSELoss(reduction='sum')
learning_rate = 1e-4
# 构建optimizer
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
for t in range(500):
y_pred = model(x)
loss = loss_fn(y_pred, y)
if t % 100 == 99:
print(t, loss.item())
# 和model.zero_grad()同样的作用
optimizer.zero_grad()
loss.backward()
# 替代了上面例子的一个个参数更新,相当于封装了一个个参数更新
optimizer.step()
99 36.15200424194336
199 0.32718443870544434
299 0.008027580566704273
399 0.0008134263334795833
499 7.64066498959437e-05
Pytorch: Custom nn Modules
定义nn.Module的子类,自定义Model
# -*- coding: utf-8 -*-
import torch
class TwoLayerNet(torch.nn.Module):
def __init__(self, D_in, H, D_out):
super(TwoLayerNet, self).__init__()
self.linear1 = torch.nn.Linear(D_in, H)
self.linear2 = torch.nn.Linear(H, D_out)
def forward(self, x):
h_relu = self.linear1(x).clamp(min=0)
y_pred = self.linear2(h_relu)
return y_pred
# N is batch size; D_in is input dimension;
# H is hidden dimension; D_out is output dimension.
N, D_in, H, D_out = 64, 1000, 100, 10
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
model = TwoLayerNet(D_in, H, D_out)
criterion = torch.nn.MSELoss(reduction='sum')
optimizer = torch.optim.SGD(model.parameters(), lr=1e-4)
for t in range(500):
y_pred = model(x)
# loss
loss = criterion(y_pred, y)
if t % 100 == 99:
print(t, loss.item())
# Zero gradients and backward , and update the weights
optimizer.zero_grad()
loss.backward()
optimizer.step()
99 3.0683937072753906
199 0.03691878542304039
299 0.0009349210886284709
399 4.506673212745227e-05
499 3.3089236239902675e-06
Pytorch: Control Flow + Weight Sharing
动态图,控制模型最终的定义。
# -*-coding: utf-8 -*-
import random
import torch
class DynamicNet(torch.nn.Module):
def __init__(self, D_in, H, D_out):
super(DynamicNet, self).__init__()
self.input_linear = torch.nn.Linear(D_in, H)
self.middle_linear = torch.nn.Linear(H, H)
self.out_linear = torch.nn.Linear(H, D_out)
def forward(self, x):
# 对于前向传播,我们随机选择0,1,2,3,随机产生隐藏层的层数
h_relu = self.input_linear(x).clamp(min=0)
for _ in range(random.randint(0, 3)):
h_relu = self.middle_linear(h_relu).clamp(min=0)
y_pred = self.out_linear(h_relu)
return y_pred
N, D_in, H, D_out = 64, 1000, 100, 10
# Create random Tensors to hold inputs and outputs
x = torch.randn(N, D_in)
y = torch.randn(N, D_out)
# Construct our model by instantiating the class defined above
model = DynamicNet(D_in, H, D_out)
criterion = torch.nn.MSELoss(reduction='sum')
optimizer = torch.optim.SGD(model.parameters(), lr=1e-4, momentum=0.9)
for t in range(500):
# Forward pass: Compute predicted y by passing x to the model
y_pred = model(x)
# Compute and print loss
loss = criterion(y_pred, y)
if t % 100 == 99:
print(t, loss.item())
# Zero gradients, perform a backward pass, and update the weights.
optimizer.zero_grad()
loss.backward()
optimizer.step()
99 12.072546005249023
199 21.22652816772461
299 0.1546557992696762
399 0.33444735407829285
499 0.6670736074447632
Tensorflow: Static Graphs
TensorFlow 和 Pytorch其中的不同之处,主要是TensorFlow使用static computational graphs,而Pytorch使用dynamic computational graphs。
注:下面的例子是基于TensorFlow 1版本的,而目前我安装的是TensorFlow 2版本的,不兼容,所以下面代码运行会报错,展示出来,只是为了显示TensorFlow的静态图。
# import tensorflow as tf
# import numpy as np
# # First we set up the computational graph:
# # N is batch size; D_in is input dimension;
# # H is hidden dimension; D_out is output dimension.
# N, D_in, H, D_out = 64, 1000, 100, 10
# # Create placeholders for the input and target data; these will be filled
# # with real data when we execute the graph.
# x = tf.placeholder(tf.float32, shape=(None, D_in))
# y = tf.placeholder(tf.float32, shape=(None, D_out))
# # Create Variables for the weights and initialize them with random data.
# # A TensorFlow Variable persists its value across executions of the graph.
# w1 = tf.Variable(tf.random_normal((D_in, H)))
# w2 = tf.Variable(tf.random_normal((H, D_out)))
# # Forward pass: Compute the predicted y using operations on TensorFlow Tensors.
# # Note that this code does not actually perform any numeric operations; it
# # merely sets up the computational graph that we will later execute.
# h = tf.matmul(x, w1)
# h_relu = tf.maximum(h, tf.zeros(1))
# y_pred = tf.matmul(h_relu, w2)
# # Compute loss using operations on TensorFlow Tensors
# loss = tf.reduce_sum((y - y_pred) ** 2.0)
# # Compute gradient of the loss with respect to w1 and w2.
# grad_w1, grad_w2 = tf.gradients(loss, [w1, w2])
# # Update the weights using gradient descent. To actually update the weights
# # we need to evaluate new_w1 and new_w2 when executing the graph. Note that
# # in TensorFlow the the act of updating the value of the weights is part of
# # the computational graph; in PyTorch this happens outside the computational
# # graph.
# learning_rate = 1e-6
# new_w1 = w1.assign(w1 - learning_rate * grad_w1)
# new_w2 = w2.assign(w2 - learning_rate * grad_w2)
# # Now we have built our computational graph, so we enter a TensorFlow session to
# # actually execute the graph.
# with tf.Session() as sess:
# # Run the graph once to initialize the Variables w1 and w2.
# sess.run(tf.global_variables_initializer())
# # Create numpy arrays holding the actual data for the inputs x and targets
# # y
# x_value = np.random.randn(N, D_in)
# y_value = np.random.randn(N, D_out)
# for t in range(500):
# # Execute the graph many times. Each time it executes we want to bind
# # x_value to x and y_value to y, specified with the feed_dict argument.
# # Each time we execute the graph we want to compute the values for loss,
# # new_w1, and new_w2; the values of these Tensors are returned as numpy
# # arrays.
# loss_value, _, _ = sess.run([loss, new_w1, new_w2],
# feed_dict={x: x_value, y: y_value})
# if t % 100 == 99:
# print(t, loss_value)
What IS torch.nn really?
MNIST data setup
我们使用手写数字图片(0-9)MNIST数据集。利用Python3自带的pathlib模块处理路径,利用requests下载图片。
from pathlib import Path
import requests
# 返回目录data下的object,数据类型是 WindowsPath,返回值WindowsPath('data')
DATA_PATH = Path("data")
# WindowsPath和字符串拼接,生成 WindowsPath('data/mnist')
PATH = DATA_PATH / 'mnist'
# mkdir()的两个参数,
# parents:True,表示任何目录不存在,就会被创建。False,表示若不存在,报错FileNotFoundError。
# exist_ok: False,表示目录如果存在,报错 FileExistsError。True,表示目录如果存在,忽略报错 FileExistsError。
PATH.mkdir(parents=True, exist_ok=True)
URL = "http://deeplearning.net/data/mnist/"
FILENAME = 'mnist.pkl.gz'
if not (PATH / FILENAME).exists():
content = requests.get(URL + FILENAME).content
# 将content写入文件FILENAME中
(PATH / FILENAME).open('wb').write(content)
# 该数据是numpy array 格式,经过上面操作已经以pickle形式被存储
import pickle
import gzip
# as_posix()函数,主要使window系统的反斜杠'\',变成正斜杠'/'
with gzip.open((PATH/FILENAME).as_posix(), 'rb') as f:
((x_train, y_train), (x_valid, y_valid), _) = pickle.load(f, encoding='latin-1')
# 每张图片都是28*28,被存储以a flattened row,长度784(28*28),我们需要reshape to 2d.
from matplotlib import pyplot
import numpy as np
pyplot.imshow(x_train[0].reshape((28, 28)), cmap="gray")
print(x_train.shape)
(50000, 784)
import torch
# 由于数据集是numpy arrays,转换为 torch.tensor
x_train, y_train, x_valid, y_valid = map(torch.tensor, (x_train, y_train, x_valid, y_valid))
n, c = x_train.shape
# 查看数据情况
print(x_train, y_train)
print(x_train.shape)
print(y_train.min(), y_train.max())
tensor([[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
...,
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.],
[0., 0., 0., ..., 0., 0., 0.]]) tensor([5, 0, 4, ..., 8, 4, 8])
torch.Size([50000, 784])
tensor(0) tensor(9)
Neural net from scratch (no torch.nn)
我们用pytorch的tensor的基本操作来创建模型,不涉及torch.nn等包。
import math
# 利用Xavier initialisation初始化权重,即:乘以系数 1/sqrt(n)
weights = torch.randn(784, 10)/math.sqrt(784)
weights.requires_grad_(True)
bias = torch.zeros(10, requires_grad=True)
# 激活函数, x - log(sum(exp(x)))
def log_softmax(x):
return x - x.exp().sum(-1).log().unsqueeze(-1)
# 自定义模型
def model(xb):
return log_softmax(xb @ weights + bias)
# batch size
bs = 64
# a mini-batch from x
xb = x_train[0: bs]
# 简单的前向传播,此时的权重只是刚开始初始化的权重
preds = model(xb)
# 我们能够看到preds不仅是个tensor values,还是个 gradient function,后面将用来做反向传播。
print(preds[0], preds.shape)
print('*'*50)
# 定义损失函数
def nll(input, target):
return -input[range(target.shape[0]), target].mean()
loss_func = nll
yb = y_train[0: bs]
print(loss_func(preds, yb))
print('*'*50)
# 计算模型的准确率
def accuracy(out, yb):
preds = torch.argmax(out, dim=1)
return (preds == yb).float().mean()
print(accuracy(preds, yb))
tensor([-2.1470, -2.6022, -2.4621, -2.5204, -2.3438, -2.8420, -2.0887, -2.7984,
-1.8764, -1.8892], grad_fn=) torch.Size([64, 10])
**************************************************
tensor(2.3567, grad_fn=)
**************************************************
tensor(0.1719)
run a training loop:
- 选择 a mini-batch of data
- 模型预测
- 计算损失值
- 反向传播,更新模型参数
tip:可以使用Python自带的debugger调式pytorch代码,每一步都能够看到每个变量的值
from IPython.core.debugger import set_trace
lr = 0.5
epochs = 2
for epoch in range(epochs):
for i in range((n-1)//bs + 1):
# set_trace()
start_i = i * bs
end_i = start_i + bs
xb = x_train[start_i: end_i]
yb = y_train[start_i: end_i]
# forward
pred = model(xb)
# loss
loss = loss_func(pred, yb)
# backward
loss.backward()
# update weights
with torch.no_grad():
weights -= weights.grad * lr
bias -= bias.grad * lr
weights.grad.zero_()
bias.grad.zero_()
print(loss_func(model(xb), yb), accuracy(model(xb), yb))
tensor(0.0827, grad_fn=) tensor(1.)
Using torch.nn.functional
与上面例子相比,为了达到同样的目的,充分展现pytorch的优势,其实nn包使代码更简单和灵活。利用torch.nn.functional能够替代我们自己手写的激活函数和损失函数。还能创建神经网络结构,例如pooling、convolutions、linear layers等。
import torch.nn.functional as F
# 损失函数F.cross_entropy 替代自定义的nll
loss_func = F.cross_entropy
# 激活函数F.log_softmax 替代自定义的log_softmax
def model(xb):
return F.log_softmax(xb @ weights + bias, dim=1)
# 最终的损失值和准确率都是同上面计算出来的一样
print(loss_func(model(xb), yb), accuracy(model(xb), yb))
tensor(0.0827, grad_fn=) tensor(1.)
Refactor using nn.Model
我们将会用nn.Module和nn.Parameter模块,nn.Module有许多属性和方法,比如.parameters()和.zero_grad()。同时我们可以定义nn.Module的子类,能够 keep track of state。
from torch import nn
class Mnist_Logistic(nn.Module):
def __init__(self):
super(Mnist_Logistic, self).__init__()
self.weights = nn.Parameter(torch.randn(784, 10) / math.sqrt(784))
self.bias = nn.Parameter(torch.zeros(10))
def forward(self, xb):
return xb @ self.weights + self.bias
model = Mnist_Logistic()
print(loss_func(model(xb), yb))
# 不同于自己定义的参数更新(6.2章节代码),这次使用 model.parameters() and model.zero_grad()
# 这样不至于忘记某些参数,特别当模型很复杂的时候
# warp out little training loop in a fit function
def fit():
for epoch in range(epochs):
for i in range((n-1)//bs + 1):
start_i = i * bs
end_i = start_i + bs
xb = x_train[start_i: end_i]
yb = y_train[start_i: end_i]
pred = model(xb)
loss = loss_func(pred, yb)
loss.backward()
with torch.no_grad():
# 不同于自己定义的参数更新(6.2章节代码),这次使用 model.parameters() and model.zero_grad()
# 这样不至于忘记某些参数,特别当模型很复杂的时候
for p in model.parameters():
p -= p.grad * lr
model.zero_grad()
fit()
print(loss_func(model(xb), yb))
tensor(2.2315, grad_fn=)
tensor(0.0842, grad_fn=)
Refactor using nn.Linear
继续更新我们的代码。不同于之前自定义和初始化self.weights和self.bias,以及xb @ self.weights + self.bias。我们将用nn.Linear替换
class Mnist_Logistic(nn.Module):
def __init__(self):
super(Mnist_Logistic, self).__init__()
self.lin = nn.Linear(784, 10)
def forward(self, xb):
return self.lin(xb)
model = Mnist_Logistic()
Refactor using optim
我们使用torch.optim替换 update each parameter
from torch import optim
def get_model():
model = Mnist_Logistic()
return model, optim.SGD(model.parameters(), lr=lr)
model, opt = get_model()
for epoch in range(epochs):
for i in range((n-1)//bs + 1):
start_i = i * bs
end_i = start_i + bs
xb = x_train[start_i: end_i]
yb = y_train[start_i: end_i]
pred = model(xb)
loss = loss_func(pred, yb)
opt.zero_grad()
loss.backward()
# 替换上个例子更新参数方法
opt.step()
print(loss_func(model(xb), yb))
tensor(0.0808, grad_fn=)
Refactor using Dataset
pytorch的TensorDataset是一种可以包裹tensors的数据集合。
from torch.utils.data import TensorDataset
# x_train, y_train 合并在一起
train_ds = TensorDataset(x_train, y_train)
model, opt = get_model()
for epoch in range(epochs):
for i in range((n - 1) // bs + 1):
# 下面一行代码,等价于:
# xb = x_train[start_i:end_i]
# yb = y_train[start_i:end_i]
xb, yb = train_ds[i * bs: i * bs + bs]
pred = model(xb)
loss = loss_func(pred, yb)
loss.backward()
opt.step()
opt.zero_grad()
print(loss_func(model(xb), yb))
tensor(0.0824, grad_fn=)
Refactor using DataLoader
DataLoader主要用来管理batches。对任何Dataset都可以创建DataLoader。DataLoader让batches迭代更加容易,而不需要在使用train_ds[i*bs : i*bs+bs] 。
from torch.utils.data import DataLoader
train_ds = TensorDataset(x_train, y_train)
train_dl = DataLoader(train_ds, batch_size=bs)
model, opt = get_model()
for epoch in range(epochs):
for xb, yb in train_dl:
pred = model(xb)
loss = loss_func(pred, yb)
opt.zero_grad()
loss.backward()
opt.step()
print(loss_func(model(xb), yb))
tensor(0.0820, grad_fn=)
Add validation
以往章节,都忽略了验证集,但事实上,需要验证集,来判断是否过拟合。另外,shuffle 训练集数据也很重要,
# shuffle训练集
train_ds = TensorDataset(x_train, y_train)
train_dl = DataLoader(train_ds, batch_size=bs, shuffle=True)
# 引入验证集,验证集batch大小,我们设置了是训练集大小的两倍
valid_ds = TensorDataset(x_valid, y_valid)
valid_dl = DataLoader(valid_ds, batch_size=bs * 2)
model, opt = get_model()
# 注:在训练之前,我们先`model.train()`,在验证之前,先`model.eval()`。
# 因为像`nn.BatchNorm2d`和`nn.Dropout`这样的layers被使用时候,能够确保不同阶段(训练阶段和验证阶段)不一样的行为。
for epoch in range(epochs):
# 训练之前,使用 model.train()
model.train()
for xb, yb in train_dl:
pred = model(xb)
loss = loss_func(pred, yb)
opt.zero_grad()
loss.backward()
opt.step()
# 验证之前, 使用 model.eval()
model.eval()
with torch.no_grad():
# 测试集的损失值之和
valid_loss = sum(loss_func(model(xb), yb) for xb, yb in valid_dl)
# 打印每个epoch下,验证集平均损失
print(epoch, valid_loss/len(valid_dl))
0 tensor(0.4226)
1 tensor(0.2868)
Create fit() and get_data()
继续优化我们的代码。由于我们在训练集合验证集做了类似的操作,即计算了损失值。因此,我们可以封装在函数loss_batch中。对于训练集,我们需要optimizer。而对于验证集,我们不需要 optimizer。
def loss_batch(model, loss_func, xb, yb, opt=None):
loss = loss_func(model(xb), yb)
if opt is not None:
opt.zero_grad()
loss.backward()
opt.step()
return loss.item(), len(xb)
def get_data(train_ds, valid_ds, bs):
return (
DataLoader(train_ds, batch_size=bs, shuffle=True),
DataLoader(valid_ds, batch_size=bs * 2),
)
import numpy as np
def fit(epochs, model, loss_func, opt, train_dl, valid_dl):
for epoch in range(epochs):
model.train()
for xb, yb in train_dl:
loss_batch(model, loss_func, xb, yb, opt)
model.eval()
with torch.no_grad():
losses, nums = zip(
*[loss_batch(model, loss_func, xb, yb) for xb, yb in valid_dl]
)
val_loss = np.sum(np.multiply(losses, nums)) / np.sum(nums)
print(epoch, val_loss)
train_dl, valid_dl = get_data(train_ds, valid_ds, bs)
model, opt = get_model()
fit(epochs, model, loss_func, opt, train_dl, valid_dl)
0 0.29847807577848434
1 0.32609606840610506
Switch to CNN
由于前面的章节,没有对模型形式做说明,只是简单的线性函数,本章节将会训练一个cnn模型。
class Mnist_CNN(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(1, 16, kernel_size=3, stride=2, padding=1)
self.conv2 = nn.Conv2d(16, 16, kernel_size=3, stride=2, padding=1)
self.conv3 = nn.Conv2d(16, 10, kernel_size=3, stride=2, padding=1)
def forward(self, xb):
xb = xb.view(-1, 1, 28, 28)
xb = F.relu(self.conv1(xb))
xb = F.relu(self.conv2(xb))
xb = F.relu(self.conv3(xb))
xb = F.avg_pool2d(xb, 4)
return xb.view(-1, xb.size(1))
lr = 0.1
model = Mnist_CNN()
opt = optim.SGD(model.parameters(), lr=lr, momentum=0.9)
fit(epochs, model, loss_func, opt, train_dl, valid_dl)
0 0.4276552426338196
1 0.2699263202905655
nn.Sequential
nn.Sequential对象,可以包含多个Module类。
# 自定义Modulel子类,即:创建个 view layer
class Lambda(nn.Module):
def __init__(self, func):
super().__init__()
self.func = func
def forward(self, x):
return self.func(x)
def preprocess(x):
return x.view(-1, 1, 28, 28)
model = nn.Sequential(
Lambda(preprocess),
nn.Conv2d(1, 16, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.Conv2d(16, 16, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.Conv2d(16, 10, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.AvgPool2d(4),
Lambda(lambda x: x.view(x.size(0), -1)),
)
opt = optim.SGD(model.parameters(), lr=lr, momentum=0.9)
fit(epochs, model, loss_func, opt, train_dl, valid_dl)
0 0.3005018771290779
1 0.2376256714463234
Wrapping DataLoader
继续优化我们的代码,我们想移出 Lambda layer,把数据预处理融入进generator中。
def preprocess(x, y):
return x.view(-1, 1, 28, 28), y
# 自定义个 generator,融入 数据预处理功能,即preprocess()的功能
class WrappedDataLoader:
def __init__(self, dl, func):
self.dl = dl
self.func = func
def __len__(self):
return len(self.dl)
def __iter__(self):
batches = iter(self.dl)
for b in batches:
yield (self.func(*b))
train_dl, valid_dl = get_data(train_ds, valid_ds, bs)
train_dl = WrappedDataLoader(train_dl, preprocess)
valid_dl = WrappedDataLoader(valid_dl, preprocess)
model = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.Conv2d(16, 16, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.Conv2d(16, 10, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.AdaptiveAvgPool2d(1),
Lambda(lambda x: x.view(x.size(0), -1)),
)
opt = optim.SGD(model.parameters(), lr=lr, momentum=0.9)
fit(epochs, model, loss_func, opt, train_dl, valid_dl)
0 0.3556475947856903
1 0.26916867879629136
Using your GPU
数据集转移至gpu,模型转移至gpu
dev = torch.device(
"cuda") if torch.cuda.is_available() else torch.device("cpu")
def preprocess(x, y):
return x.view(-1, 1, 28, 28).to(dev), y.to(dev)
train_dl, valid_dl = get_data(train_ds, valid_ds, bs)
train_dl = WrappedDataLoader(train_dl, preprocess)
valid_dl = WrappedDataLoader(valid_dl, preprocess)
model = nn.Sequential(
nn.Conv2d(1, 16, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.Conv2d(16, 16, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.Conv2d(16, 10, kernel_size=3, stride=2, padding=1),
nn.ReLU(),
nn.AdaptiveAvgPool2d(1),
Lambda(lambda x: x.view(x.size(0), -1)),
)
model.to(dev)
opt = optim.SGD(model.parameters(), lr=lr, momentum=0.9)
fit(epochs, model, loss_func, opt, train_dl, valid_dl)
0 0.37574934339523314
1 0.33825436668396
Closing thoughts
模块总结:
- torch.nn
- Module
- Parameter
- functional
- torch.optim: update weights
- Dataset: such as TensorDataset, 合并x_train, y_train
- DataLoader: returns batches of data
Visualizing models, data, and training with tensorboard
以上六章内,我们展示了如何加载数据,数据如何喂进模型,在训练集上训练数据,测试集上测试数据。为了了解发生了什么,我们在模型进行训练时打印出一些统计数据,以了解训练是否在进行。
然而,pytorch结合了TensorBoard(可视化神经网络训练结果的工具)。
# imports
import matplotlib.pyplot as plt
import numpy as np
import torch
import torchvision
import torchvision.transforms as transforms
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
# transforms
transform = transforms.Compose([transforms.ToTensor(),
transforms.Normalize((0.5), (0.5))])
# datasets
trainset = torchvision.datasets.FashionMNIST('./data',
download=True,
train=True,
transform=transform)
testset = torchvision.datasets.FashionMNIST('./data',
download=True,
train=False,
transform=transform)
# dataloaders
trainloader = torch.utils.data.DataLoader(trainset,
batch_size=4,
shuffle=True,
num_workers=2)
testloader = torch.utils.data.DataLoader(testset,
batch_size=4,
shuffle=False,
num_workers=2)
# constant for classes
classes = ('T-shirt/top', 'Trouser', 'Pullover', 'Dress', 'Coat',
'Sandal', 'Shirt', 'Sneaker', 'Bag', 'Ankle Boot')
# images show
def matplotlib_imshow(img, one_channel=False):
if one_channel:
img = img.mean(dim=0)
img = img/2 + 0.5 # unnormalize
npimg = img.numpy()
if one_channel:
plt.imshow(npimg, cmap='Greys')
else:
print(npimg.shape)
plt.imshow(np.transpose(npimg, (1, 2, 0)))
return npimg
dataiter = iter(trainloader)
images, labels = dataiter.next()
# 展示图片,make_grid的作用是将若干幅图像拼成一幅图像
npimg = matplotlib_imshow(torchvision.utils.make_grid(images), False)
# 打印标签
print(' \t'.join('%5s' % classes[labels[j]] for j in range(4)))
(3, 32, 122)
Ankle Boot Bag Bag Sandal
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(1, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 4 * 4, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 4 * 4)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
# 网络结构
net = Net()
# 损失函数类
criterion = nn.CrossEntropyLoss()
# optimizer类
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
TensorBoard setup
from torch.utils.tensorboard import SummaryWriter
# creates a runs/fashion_mnist_experiment_1 folder,responsible for writing information to TensorBoard
writer = SummaryWriter('runs/fashion_mnist_experiment_1')
Writing to TrensorBoard
图片写入TensorBoard
# get some random training images
dataiter = iter(trainloader)
images, labels = dataiter.next()
# create grid of images
img_grid = torchvision.utils.make_grid(images)
# show images
matplotlib_imshow(img_grid, one_channel=True)
# write to tensorboard
writer.add_image('four_fashion_mnist_images', img_grid)
writer.close()
以路径..\runs下,使用命令行运行以下代码:tensorboard --logdir=runs
然后,浏览器输入地址:http://localhost:6006/
图片显示如下:

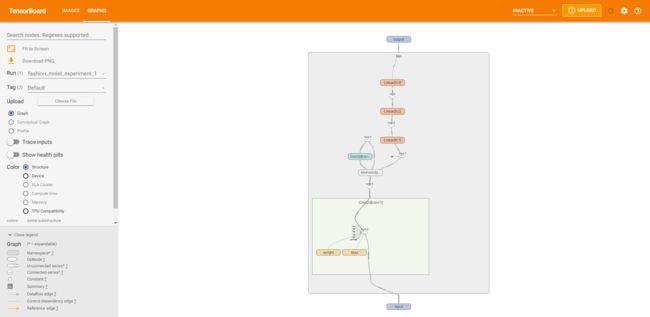
Inspect the model using TensorBoard
TensorBoard强项之一是,它能够可视化复杂的模型结构及交互式可视化的方式。
writer.add_graph(net, images)
writer.close()
Adding a “Projector” to TensorBoard
# visualize the lower dimensional representation of higher dimensional data(用低维数据表示高维数据,并可视化显示)
# 辅助函数
def select_n_random(data, labels, n=100):
"""
select n random datapoints and their corresponding(对应的) labels from a dataset
"""
assert len(data) == len(labels)
# 1-len(data)的数值随机排序
perm = torch.randperm(len(data))
return data[perm][:n], labels[perm][:n]
# select random images and their target indices
images, labels = select_n_random(trainset.data, trainset.targets)
# get class labels for each image
class_labels = [classes[lab] for lab in labels]
# log embeddings
features = images.view(-1, 28*28)
writer.add_embedding(features,
metadata=class_labels,
label_img=images.unsqueeze(1)
)
writer.close()
在TensorBoard的“project”tab中,将会看到100张图片,784维度被投影到3维空间。此外,也可以单击拖拽旋转三维投影。

注:如果根据官网操作会报错,因为TensorFlow的版本问题,在安装pytorch后,还需要安装tensorflow/tensorboard等。
如果报错:‘tensorflow_core._api.v2.io.gfile’ has no attribute ‘get_filesystem’
解决方案:在writer.py文件中加入
import tensorboard as tb tf.io.gfile = tb.compat.tensorflow_stub.io.gfile
Tracking model training with TensorBoard
之前的例子中,我们通过打印训练过程的loss值。本章节,我们将运行loss在TensorBoard,并通过函数plot_classes_preds查看模型的预测。
def images_to_probs(net, images):
output = net(images) # 返回预测概率值
_, preds_tensor = torch.max(output, 1) # 返回预测值
preds = np.squeeze(preds_tensor.numpy())
# 利用softmax函数计算最终预测的概率
return preds, [F.softmax(el, dim=0)[i].item() for i, el in zip(preds, output)]
def plot_classes_preds(net, images, labels):
preds, probs = images_to_probs(net, images)
# plot the images in the batch, along with predicted and true labels
fig = plt.figure(figsize=(12, 48))
for idx in np.arange(4):
ax = fig.add_subplot(1, 4, idx+1, xticks=[], yticks=[])
matplotlib_imshow(images[idx], one_channel=True)
ax.set_title("{0}, {1:.1f}%\n(label: {2})".format(classes[preds[idx]],
probs[idx]*100,
classes[labels[idx]]
),
color=("green" if preds[idx]==labels[idx].item() else "red"))
return fig
running_loss = 0.0
for epoch in range(1): # loop over the dataset multiple times
for i, data in enumerate(trainloader, 0):
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data
# zero the parameter gradients
optimizer.zero_grad()
# forward + backward + optimize
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
if i % 1000 == 999: # every 1000 mini-batches...
# ...log the running loss
writer.add_scalar('training loss',
running_loss / 1000,
epoch * len(trainloader) + i)
# ...log a Matplotlib Figure showing the model's predictions on a
# random mini-batch
writer.add_figure('predictions vs. actuals',
plot_classes_preds(net, inputs, labels),
global_step=epoch * len(trainloader) + i)
running_loss = 0.0
print('Finished Training')
Finished Training


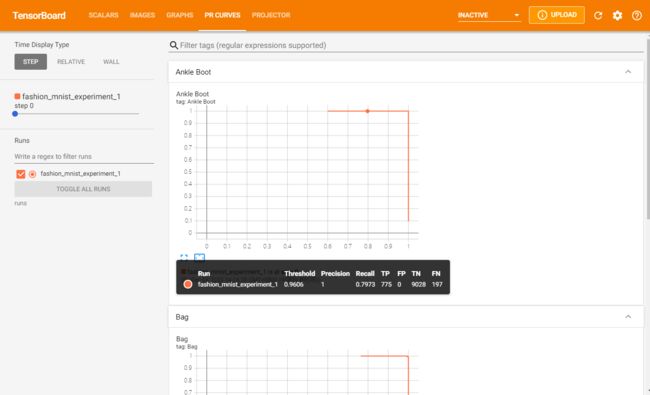
Assessing trained models with TensorBoard
# 1. gets the probability predictions in a test_size x num_classes Tensor
# 2. gets the preds in a test_size Tensor
# takes ~10 seconds to run
class_probs = []
class_preds = []
with torch.no_grad():
for data in testloader:
images, labels = data
output = net(images)
class_probs_batch = [F.softmax(el, dim=0) for el in output]
_, class_preds_batch = torch.max(output, 1)
class_probs.append(class_probs_batch)
class_preds.append(class_preds_batch)
test_probs = torch.cat([torch.stack(batch) for batch in class_probs])
test_preds = torch.cat(class_preds)
# helper function
def add_pr_curve_tensorboard(class_index, test_probs, test_preds, global_step=0):
'''
Takes in a "class_index" from 0 to 9 and plots the corresponding
precision-recall curve
'''
tensorboard_preds = test_preds == class_index
tensorboard_probs = test_probs[:, class_index]
writer.add_pr_curve(classes[class_index],
tensorboard_preds,
tensorboard_probs,
global_step=global_step)
writer.close()
# plot all the pr curves
for i in range(len(classes)):
add_pr_curve_tensorboard(i, test_probs, test_preds)