各种坐标系下的散度、梯度、旋度公式
引言
本文介绍了散度、梯度和旋度在直角坐标系、柱坐标系和球坐标系三种常见坐标系下的表示。记录一下,具体可以利用梅拉系数进行推导。
谨记:
梯度:标量求梯度得到矢量。
散度:矢量求散度得到标量。
旋度:矢量求旋度得到矢量。
1.直角坐标系
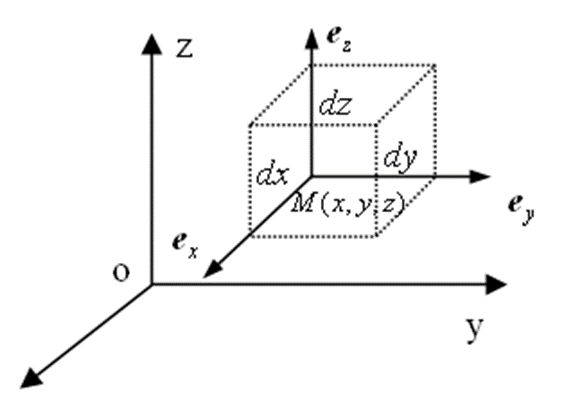
标量表示
f = f ( x , y , z ) f=f(x,y,z) f=f(x,y,z)
矢量表示
f → = f x e x → + f y e y → + f z e z → \mathbf{\overrightarrow{f}}=f_x\mathbf{\overrightarrow{e_x}}+f_y\mathbf{\overrightarrow{e_y}}+f_z\mathbf{\overrightarrow{e_z}} f=fxex+fyey+fzez
梯度:
▽ f = ∂ f ∂ x e x → + ∂ f ∂ y e y → + ∂ f ∂ z e z → \bigtriangledown {f}=\frac{\partial f}{\partial x}\mathbf{\overrightarrow{e_x}}+\frac{\partial f}{\partial y}\mathbf{\overrightarrow{e_y}}+\frac{\partial f}{\partial z}\mathbf{\overrightarrow{e_z}} ▽f=∂x∂fex+∂y∂fey+∂z∂fez
散度:
▽ ⋅ f → = ∂ f x ∂ x + ∂ f y ∂ y + ∂ f z ∂ z \bigtriangledown \cdot \mathbf{\overrightarrow{f}}=\frac{\partial f_x}{\partial x}+\frac{\partial f_y}{\partial y}+\frac{\partial f_z}{\partial z} ▽⋅f=∂x∂fx+∂y∂fy+∂z∂fz
旋度:
▽ × f → = [ e x → e y → e z → ∂ ∂ x ∂ ∂ y ∂ ∂ z f x f y f z ] = ( ∂ f z ∂ y − ∂ f y ∂ z ) e x → + ( ∂ f x ∂ z − ∂ f z ∂ x ) e y → + ( ∂ f y ∂ x − ∂ f x ∂ y ) e z → \begin{aligned} \bigtriangledown \times \mathbf{\overrightarrow{f}}&= \begin{bmatrix} \mathbf{\overrightarrow{e_x}} &\mathbf{\overrightarrow{e_y}} &\mathbf{\overrightarrow{e_z}} \\ \frac{\partial}{\partial x} & \frac{\partial}{\partial y} & \frac{\partial}{\partial z} \\f_x & f_y & f_z\end{bmatrix}\\&=(\frac{\partial f_z}{\partial y}-\frac{\partial f_y}{\partial z})\mathbf{\overrightarrow{e_x}}+(\frac{\partial f_x}{\partial z}-\frac{\partial f_z}{\partial x})\mathbf{\overrightarrow{e_y}}+(\frac{\partial f_y}{\partial x}-\frac{\partial f_x}{\partial y})\mathbf{\overrightarrow{e_z}} \end{aligned} ▽×f=⎣⎡ex∂x∂fxey∂y∂fyez∂z∂fz⎦⎤=(∂y∂fz−∂z∂fy)ex+(∂z∂fx−∂x∂fz)ey+(∂x∂fy−∂y∂fx)ez
2.柱坐标系
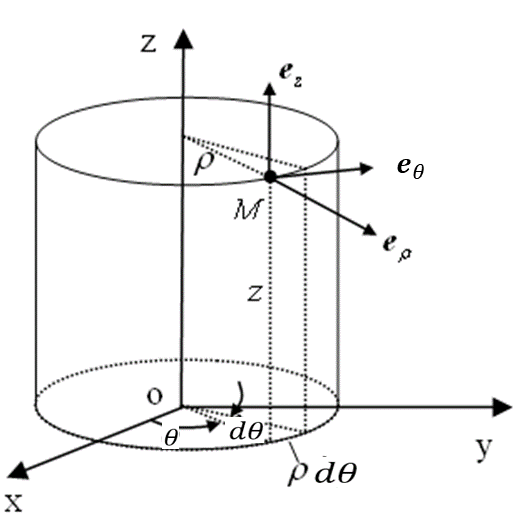
标量表示
f = f ( ρ , θ , z ) f=f(\rho,\theta,z) f=f(ρ,θ,z)
矢量表示
f → = f ρ e ρ → + f θ e θ → + f z e z → \mathbf{\overrightarrow{f}}=f_\rho\mathbf{\overrightarrow{e_\rho}}+f_\theta\mathbf{\overrightarrow{e_\theta}}+f_z\mathbf{\overrightarrow{e_z}} f=fρeρ+fθeθ+fzez
梯度:
▽ f = ∂ f ∂ ρ e ρ → + 1 ρ ∂ f ∂ θ e θ → + ∂ f ∂ z e z → \bigtriangledown {f} =\frac{\partial f}{\partial \rho}\mathbf{\overrightarrow{e_\rho}}+\frac{1}{\rho}\frac{\partial f}{\partial \theta}\mathbf{\overrightarrow{e_\theta}}+\frac{\partial f}{\partial z}\mathbf{\overrightarrow{e_z}} ▽f=∂ρ∂feρ+ρ1∂θ∂feθ+∂z∂fez
散度:
▽ ⋅ f → = 1 ρ ∂ ( ρ f ρ ) ∂ ρ + 1 ρ ∂ f θ ∂ θ + ∂ f z ∂ z \bigtriangledown \cdot \mathbf{\overrightarrow{f}}=\frac{1}{\rho}\frac{\partial (\rho f_\rho)}{\partial \rho}+\frac{1}{\rho}\frac{\partial f_\theta}{\partial \theta}+\frac{\partial f_z}{\partial z} ▽⋅f=ρ1∂ρ∂(ρfρ)+ρ1∂θ∂fθ+∂z∂fz
旋度:
▽ × f → = 1 ρ [ e ρ → ρ e θ → e z → ∂ ∂ ρ ∂ ∂ θ ∂ ∂ z f ρ ρ f θ f z ] = 1 ρ [ ( ∂ f z ∂ θ − ∂ ( ρ f θ ) ∂ z ) e ρ → + ( ∂ f ρ ∂ z − ∂ f z ∂ ρ ) ρ e θ → + ( ∂ ( ρ f θ ) ∂ ρ − ∂ f ρ ∂ θ ) e z → ] \begin{aligned} \bigtriangledown \times \mathbf{\overrightarrow{f}}&=\frac{1}{\rho} \begin{bmatrix} \mathbf{\overrightarrow{e_\rho}} &\rho\mathbf{\overrightarrow{e_\theta}} &\mathbf{\overrightarrow{e_z}} \\ \frac{\partial}{\partial \rho} & \frac{\partial}{\partial \theta} & \frac{\partial}{\partial z} \\f_\rho & \rho f_\theta & f_z\end{bmatrix}\\&=\frac{1}{\rho}\left[(\frac{\partial f_z}{\partial \theta}-\frac{\partial (\rho f_\theta)}{\partial z})\mathbf{\overrightarrow{e_\rho}}+(\frac{\partial f_\rho}{\partial z}-\frac{\partial f_z}{\partial \rho})\rho\mathbf{\overrightarrow{e_\theta}}+(\frac{\partial (\rho f_\theta)}{\partial \rho}-\frac{\partial f_\rho}{\partial \theta})\mathbf{\overrightarrow{e_z}}\right] \end{aligned} ▽×f=ρ1⎣⎡eρ∂ρ∂fρρeθ∂θ∂ρfθez∂z∂fz⎦⎤=ρ1[(∂θ∂fz−∂z∂(ρfθ))eρ+(∂z∂fρ−∂ρ∂fz)ρeθ+(∂ρ∂(ρfθ)−∂θ∂fρ)ez]
3.球坐标系
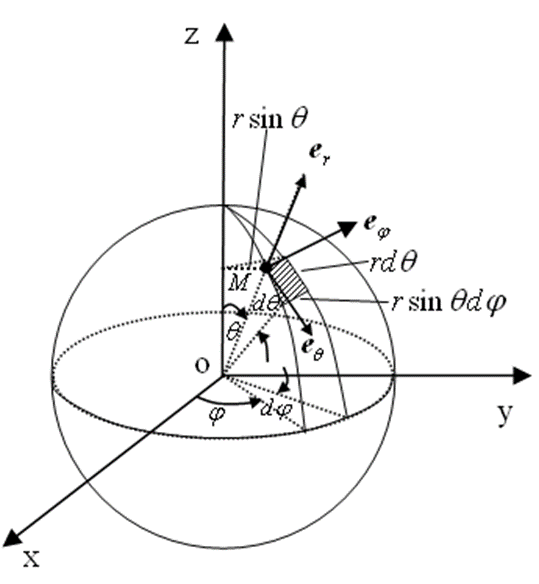
(请注意这里的 θ \theta θ和柱坐标系中的 θ \theta θ的定义不同,详细见图)
标量表示
f = f ( ρ , θ , ϕ ) f=f(\rho,\theta,\phi) f=f(ρ,θ,ϕ)
矢量表示
f → = f ρ e ρ → + f θ e θ → + f ϕ e ϕ → \mathbf{\overrightarrow{f}}=f_\rho\mathbf{\overrightarrow{e_\rho}}+f_\theta\mathbf{\overrightarrow{e_\theta}}+f_\phi\mathbf{\overrightarrow{e_\phi}} f=fρeρ+fθeθ+fϕeϕ
梯度:
▽ f = ∂ f ∂ ρ e ρ → + 1 ρ ∂ f ∂ θ e θ → + 1 ρ s i n θ ∂ f ∂ ϕ e ϕ → \bigtriangledown {f} =\frac{\partial f}{\partial \rho}\mathbf{\overrightarrow{e_\rho}}+\frac{1}{\rho}\frac{\partial f}{\partial \theta}\mathbf{\overrightarrow{e_\theta}}+\frac{1}{\rho sin\theta}\frac{\partial f}{\partial \phi}\mathbf{\overrightarrow{e_\phi}} ▽f=∂ρ∂feρ+ρ1∂θ∂feθ+ρsinθ1∂ϕ∂feϕ
散度:
▽ ⋅ f → = 1 ρ 2 ∂ ( ρ 2 f ρ ) ∂ ρ + 1 ρ s i n θ ∂ ( s i n θ f θ ) ∂ θ + 1 ρ s i n θ ∂ f ϕ ∂ ϕ \bigtriangledown \cdot \mathbf{\overrightarrow{f}}=\frac{1}{\rho^2}\frac{\partial (\rho^2 f_\rho)}{\partial \rho}+\frac{1}{\rho sin\theta}\frac{\partial (sin\theta f_\theta)}{\partial \theta}+\frac{1}{\rho sin\theta}\frac{\partial f_\phi}{\partial \phi} ▽⋅f=ρ21∂ρ∂(ρ2fρ)+ρsinθ1∂θ∂(sinθfθ)+ρsinθ1∂ϕ∂fϕ
旋度:
▽ × f → = 1 ρ 2 s i n θ [ e ρ → ρ e θ → ρ s i n θ e ϕ → ∂ ∂ ρ ∂ ∂ θ ∂ ∂ ϕ f ρ ρ f θ ρ s i n θ f ϕ ] = 1 ρ 2 s i n θ [ ( ∂ ( ρ s i n θ f ϕ ) ∂ θ − ∂ ( ρ f θ ) ∂ ϕ ) e ρ → + ( ∂ f ρ ∂ ϕ − ∂ ( ρ s i n θ f ϕ ) ∂ ρ ) ρ e θ → + ( ∂ ( ρ f θ ) ∂ ρ − ∂ f ρ ∂ θ ) ρ s i n θ e ϕ → ] \begin{aligned} \bigtriangledown \times \mathbf{\overrightarrow{f}}&=\frac{1}{\rho^2sin\theta} \begin{bmatrix} \mathbf{\overrightarrow{e_\rho}} &\rho\mathbf{\overrightarrow{e_\theta}} &\rho sin\theta\mathbf{\overrightarrow{e_\phi}} \\ \frac{\partial}{\partial \rho} & \frac{\partial}{\partial \theta} & \frac{\partial}{\partial \phi} \\f_\rho & \rho f_\theta & \rho sin\theta f_\phi\end{bmatrix}\\&=\frac{1}{\rho^2sin\theta}\left[(\frac{\partial (\rho sin\theta f_\phi)}{\partial \theta}-\frac{\partial (\rho f_\theta)}{\partial \phi})\mathbf{\overrightarrow{e_\rho}}+(\frac{\partial f_\rho}{\partial \phi}-\frac{\partial (\rho sin\theta f_\phi)}{\partial \rho})\rho\mathbf{\overrightarrow{e_\theta}}+(\frac{\partial (\rho f_\theta)}{\partial \rho}-\frac{\partial f_\rho}{\partial \theta})\rho sin\theta \mathbf{\overrightarrow{e_\phi}}\right] \end{aligned} ▽×f=ρ2sinθ1⎣⎡eρ∂ρ∂fρρeθ∂θ∂ρfθρsinθeϕ∂ϕ∂ρsinθfϕ⎦⎤=ρ2sinθ1[(∂θ∂(ρsinθfϕ)−∂ϕ∂(ρfθ))eρ+(∂ϕ∂fρ−∂ρ∂(ρsinθfϕ))ρeθ+(∂ρ∂(ρfθ)−∂θ∂fρ)ρsinθeϕ]
由于笔者之前一直想不清楚柱坐标系和球坐标系下三度的变换,于是查阅资料,其中发现[1]是极好的,推荐一看!!!详细推导见下面的参考资料[1],利用梅拉系数很容易地可以进行推导,利用拉梅系数还可以很直接地推导了斯托克斯公式和高斯公式,非常地简单易懂!!感谢知乎@弧长长长长长。另外[2]写得也比较详细,可以用作其他的参考。
[1] 浅谈:拉梅系数那些事儿
[2] 柱面及球面坐标系中散度、旋度的应用
附:
1.常用的梅拉系数
直角坐标系:
H x = 1 , H y = 1 , H z = 1 H_x=1,H_y=1,H_z=1 Hx=1,Hy=1,Hz=1
柱坐标系:
H r = 1 , H θ = r , H z = 1 H_r=1,H_\theta=r,H_z=1 Hr=1,Hθ=r,Hz=1
球坐标系:
H r = 1 , H θ = r , H ϕ = r s i n θ H_r=1,H_\theta=r,H_\phi=rsin\theta Hr=1,Hθ=r,Hϕ=rsinθ
2.通用公式
梯度:
▽ f = 1 H 1 ∂ f ∂ q 1 e 1 → + 1 H 2 ∂ f ∂ q 2 e 2 → + 1 H 3 ∂ f ∂ q 3 e 3 → \bigtriangledown f=\frac{1}{H_{1}} \frac{\partial f}{\partial q_{1}} \mathbf{\overrightarrow{e_1}}+\frac{1}{H_{2}} \frac{\partial f}{\partial q_{2}} \mathbf{\overrightarrow{e_2}}+\frac{1}{H_{3}} \frac{\partial f}{\partial q_{3}} \mathbf{\overrightarrow{e_3}} ▽f=H11∂q1∂fe1+H21∂q2∂fe2+H31∂q3∂fe3
散度:
div r = lim V → 0 ∮ S r i d S V = 1 H 1 H 2 H 3 ( ∂ ( r 1 H 2 H 3 ) ∂ q 1 + ∂ ( r 2 H 1 H 3 ) ∂ q 2 + ∂ ( r 3 H 2 H 1 ) ∂ q 3 ) \operatorname{div} \boldsymbol{r}=\lim _{V \rightarrow 0} \frac{\oint_{S} r_{i} d S}{V}=\frac{1}{H_{1} H_{2} H_{3}}\left(\frac{\partial\left(r_{1} H_{2} H_{3}\right)}{\partial q_{1}}+\frac{\partial\left(r_{2} H_{1} H_{3}\right)}{\partial q_{2}}+\frac{\partial\left(r_{3} H_{2} H_{1}\right)}{\partial q_{3}}\right) divr=V→0limV∮SridS=H1H2H31(∂q1∂(r1H2H3)+∂q2∂(r2H1H3)+∂q3∂(r3H2H1))
旋度:
{ rot q 1 r = 1 H 2 H 3 [ ∂ ( r 3 H 3 ) ∂ q 2 − ∂ ( r 2 H 2 ) ∂ q 3 ] rot q 2 r = 1 H 1 H 3 [ ∂ ( r 1 H 1 ) ∂ q 3 − ∂ ( r 3 H 3 ) ∂ q 1 ] rot q 3 r = 1 H 2 H 1 [ ∂ ( r 2 H 2 ) ∂ q 1 − ∂ ( r 1 H 1 ) ∂ q 2 ] \left\{\begin{array}{l} \operatorname{rot}_{q_{1}} \boldsymbol{r}=\frac{1}{H_{2} H_{3}}\left[\frac{\partial\left(r_{3} H_{3}\right)}{\partial q_{2}}-\frac{\partial\left(r_{2} H_{2}\right)}{\partial q_{3}}\right] \\ \operatorname{rot}_{q_{2}} \boldsymbol{r}=\frac{1}{H_{1} H_{3}}\left[\frac{\partial\left(r_{1} H_{1}\right)}{\partial q_{3}}-\frac{\partial\left(r_{3} H_{3}\right)}{\partial q_{1}}\right] \\ \operatorname{rot}_{q_{3}} \boldsymbol{r}=\frac{1}{H_{2} H_{1}}\left[\frac{\partial\left(r_{2} H_{2}\right)}{\partial q_{1}}-\frac{\partial\left(r_{1} H_{1}\right)}{\partial q_{2}}\right] \end{array}\right. ⎩⎪⎪⎪⎨⎪⎪⎪⎧rotq1r=H2H31[∂q2∂(r3H3)−∂q3∂(r2H2)]rotq2r=H1H31[∂q3∂(r1H1)−∂q1∂(r3H3)]rotq3r=H2H11[∂q1∂(r2H2)−∂q2∂(r1H1)]
或
rot r = 1 H 1 H 2 H 3 ∣ H 1 e 1 H 2 e 2 H 3 e 3 ∂ ∂ q 1 ∂ ∂ q 2 ∂ ∂ q 3 H 1 r 1 H 2 r 2 H 3 r 3 ∣ \operatorname{rot} \boldsymbol{r}=\frac{1}{H_{1} H_{2} H_{3}}\left|\begin{array}{ccc} H_{1} \boldsymbol{e}_{1} & H_{2} \boldsymbol{e}_{2} & H_{3} \boldsymbol{e}_{3} \\ \frac{\partial}{\partial q_{1}} & \frac{\partial}{\partial q_{2}} & \frac{\partial}{\partial q_{3}} \\ H_{1} r_{1} & H_{2} r_{2} & H_{3} r_{3} \end{array}\right| rotr=H1H2H31∣∣∣∣∣∣H1e1∂q1∂H1r1H2e2∂q2∂H2r2H3e3∂q3∂H3r3∣∣∣∣∣∣