论文阅读笔记: fast-lio系列
code: https://github.com/hku-mars/FAST_LIO
paper:
fast-lio: https://arxiv.org/abs/2010.08196
fast-lio2: FAST_LIO/Fast_LIO_2.pdf at main · hku-mars/FAST_LIO · GitHub
====
(2020) FAST-LIO: A Fast, Robust LiDAR-inertial Odometry Package by Tightly-Coupled Iterated Kalman Filter
一、贡献
1. 一种用interated kalman filter实现的直接法紧耦合LIO, 其核心是提出的kalman gain的计算方法的复杂度只和状态的维度有关(经典的kalman filter的kalman gain的计算复杂度和观测的复杂度有关,本文的作者发现了一种等效的形式, 矩阵求逆的维度从观测数量的维度减少到状态数量的维度),从而能够在移动计算平台达到实时计算;
2. 提出了一种激光去畸变的方法(作者称为back-propagation);
3. 代码开源,实验充分
二、性能
基于大疆的移动计算平台: DJI Manifold 2-C(i7-8550U/8G RAM)
1. 时间:

2. 无人机场景精度: 32m漂移0.08m
3. 室外场景精度: 140m漂移0.07m
4. 室内快速旋转(>100°/s), 定性分析,可见细节还原还是很好的:

三、实现方案
3.1 系统框图和符号定义

基本过程: 激光雷达特征提取 -> 状态估计和运动补偿 -> 残差计算和状态更新 -> 地图更新
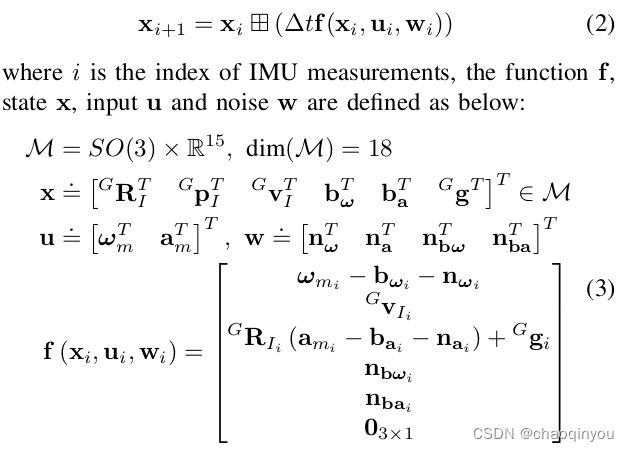
3.2 运动学模型

3.3 状态转移方程
3.4 状态估计和运动补偿(forward propagation and backward propagation)
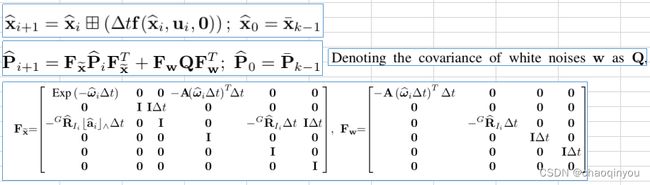
3.4.1 状态预测:
利用k-1时刻的后验状态及其协方差, 以k-1到k期间的各个imu测量量为控制逐个“传播”, 预测k时刻的状态和协方差。
状态传播时设噪声为0, 所以各个i时刻的ba, bg和g都和k-1时刻一致;
协方差传播时噪声为常数;
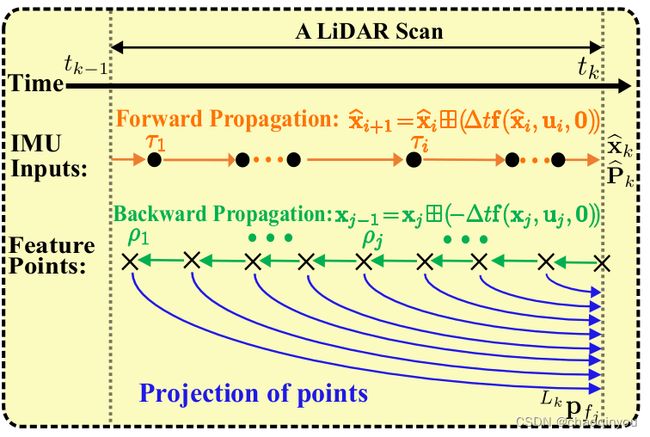
3.4.2 运动补偿
激光雷达的各个点是在k-1到k时刻之间逐步获得的,需要把它们换算到k时刻后才能作为测量进行状态更新;
激光雷达的扫描频率远高于IMU, 因此处在i-1到i时刻的激光点共享i-1处的imu测量:

得到相对位姿后,把每个点都补偿到k时刻:
![]()
3.5 残差计算
在map坐标系下面, 计算激光面特征和线特征到最近的面和线的距离(fast-lio2里面貌似只用了面特征):

3.6 状态更新
状态目的是通过迭代,获得一个对误差量的估计,用于把之前的预测值调准;
因此可以构建如式17的目标函数,在真值距离预测值不会太大的先验条件下, 使得残差最小;

式17中对于后面残差这一项要特别说明一下:
观测函数h在(上一次迭代)的预测值固定后, 是误差状态的函数:

注意到error state一般在0附近, 因此我们可以对(关于error state的)观测函数在0附近展开,并取一阶近似:
 , 其中H是观测函数对于error state的雅各比矩阵;
, 其中H是观测函数对于error state的雅各比矩阵;
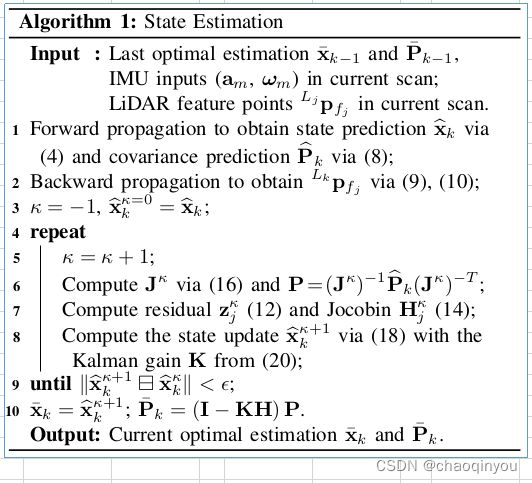
优化式17,能得到迭代的递推公式:

其中K只和状态的维度有关, 相比经典的kalman gain的计算(![]() ) ,求逆的维度大幅降低
) ,求逆的维度大幅降低
总体算法如下:
3.5 建图: 用收敛后的pose,把去畸变之后的点云加到之前map中;
3.6 初始化: 开机静止放几秒钟, 让重力加速度, bg, ba和噪声协方差初始化, 加速收敛;
四、重要参考文献
1. iterated Kalman Filter: (2019.07) LINS: A Lidar-Inertial State Estimator for Robust and Efficient Navigation
====
(2021.07) FAST-LIO2: Fast Direct LiDAR-inertial Odometry
主要贡献是ikdtre