三种梯度下降法对比(Batch gradient descent、Mini-batch gradient descent 和 stochastic gradient descent)
梯度下降(GD)是最小化风险函数、损失函数的一种常用方法,随机梯度下降(stochastic gradient descent)、批量梯度下降(Batch gradient descent)和mini-batch梯度下降(Mini-batch gradient descent) 是三种迭代求解思路,下面从公式和实现的角度对三者进行分析。
下面的h(x)是要拟合的函数,J(theta)损失函数,theta是参数,要迭代求解的值,theta求解出来了那最终要拟合的函数h(theta)就出来了。其中m是训练集的记录条数,j是参数的个数。
一、批量梯度下降的求解思路如下:
1. Batch gradient descent 就是一次迭代训练所有样本,就这样不停的迭代。整个算法的求解思路可以表示为:
(1) 将J(theta)对theta求偏导,得到每个theta对应的的梯度:
(2) 由于是要最小化风险函数,所以按每个参数theta的梯度负方向,来更新每个theta:
(3) 从上面公式可以注意到,它得到的是一个全局最优解,但是每迭代一步,都要用到训练集所有的数据,如果m很大,那么可想而知这种方法的迭代速度!!所以,这就引入了另外一种方法,随机梯度下降。
2. python实现算法:
X = data_input
Y = labels
parameters = initialize_parameters(layers_dims)
for i in range(0, num_iterations): #num_iterations--迭代次数
# Forward propagation
a, caches = forward_propagation(X, parameters)
# Compute cost.
cost = compute_cost(a, Y)
# Backward propagation.
grads = backward_propagation(a, caches, parameters)
# Update parameters.
parameters = update_parameters(parameters, grads)
Batch gradient descent的优点是理想状态下经过足够多的迭代后可以达到全局最优。但是缺点也很明显,就是如果你的数据集非常的大(现在很常见),根本没法全部塞到内存(显存)里,所以BGD对于小样本还行,大数据集就没法娱乐了。而且因为每次迭代都要计算全部的样本,所以对于大数据量会非常的慢。
二、随机梯度下降的求解思路如下:
1. 为了加快收敛速度,并且解决大数据量无法一次性塞入内存(显存)的问题,stochastic gradient descent(SGD)就被提出来了,SGD的思想是每次只训练一个样本去更新参数。具体实现思路:
(1)上面的风险函数可以写成如下这种形式,损失函数对应的是训练集中每个样本的粒度,而上面批量梯度下降对应的是所有的训练样本:
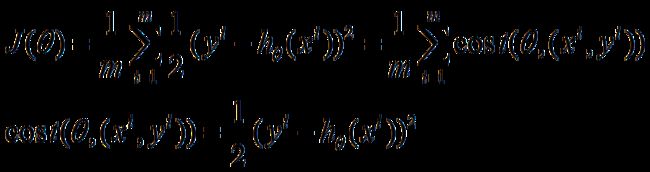
(2)每个样本的损失函数,对theta求偏导得到对应梯度,来更新theta:

(3)随机梯度下降是通过每个样本来迭代更新一次,如果样本量很大的情况(例如几十万),那么可能只用其中几万条或者几千条的样本,就已经将theta迭代到最优解了,对比上面的批量梯度下降,迭代一次需要用到十几万训练样本,一次迭代不可能最优,如果迭代10次的话就需要遍历训练样本10次。但是,SGD伴随的一个问题是噪音较BGD要多,使得SGD并不是每次迭代都向着整体最优化方向。
2. python实现算法:
X = data_input
Y = labels
permutation = list(np.random.permutation(m))
shuffled_X = X[:, permutation]
shuffled_Y = Y[:, permutation].reshape((1, m))
for i in range(0, num_iterations):
for j in range(0, m): # 每次训练一个样本
# Forward propagation
AL,caches = forward_propagation(shuffled_X[:, j].reshape(-1,1), parameters)
# Compute cost
cost = compute_cost(AL, shuffled_Y[:, j].reshape(1,1))
# Backward propagation
grads = backward_propagation(AL, shuffled_Y[:,j].reshape(1,1), caches)
# Update parameters.
parameters = update_parameters(parameters, grads, learning_rate)
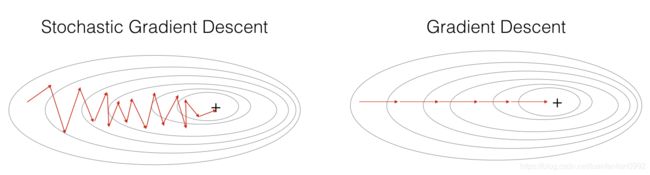
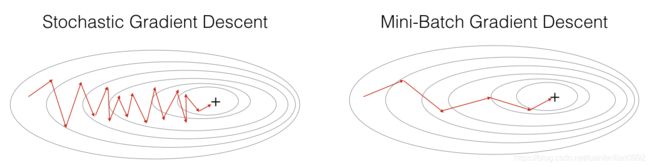
如果我们的数据集很大,比如几亿条数据,num_iterationsnum_iterations 基本上 设置1,2,(10以内的就足够了)就可以。但是SGD也有缺点,因为每次只用一个样本来更新参数,会导致不稳定性大些(可以看下图(图片来自ng deep learning 课),每次更新的方向,不想batch gradient descent那样每次都朝着最优点的方向逼近,会在最优点附近震荡)。因为每次训练的都是随机的一个样本,会导致导致梯度的方向不会像BGD那样朝着最优点。
注意:代码中的随机把数据打乱很重要,因为这个随机性相当于引入了“噪音”,正是因为这个噪音,使得SGD可能会避免陷入局部最优解中。
下面来对比下SGD和BGD的代价函数随着迭代次数的变化图:
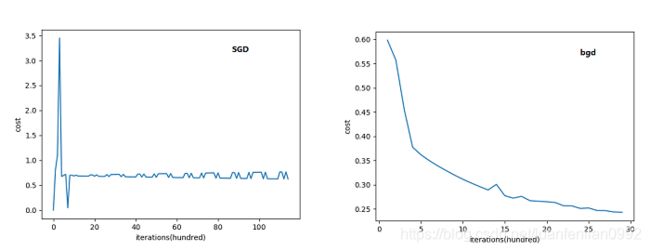
可以看到SGD的代价函数随着迭代次数是震荡式的下降的(因为每次用一个样本,有可能方向是背离最优点的)
三、Mini-batch梯度下降
1. mini-batch gradient descent 是batch gradient descent和stochastic gradient descent的折中方案,就是mini-batch gradient descent每次用一部分样本来更新参数,即 batch_sizebatch_size。因此,若batch_size=1batch_size=1 则变成了SGD,若batch_size=mbatch_size=m 则变成了batch gradient descent。batch_sizebatch_size通常设置为2的幂次方,通常设置2,4,8,16,32,64,128,256,5122,4,8,16,32,64,128,256,512(很少设置大于512)。因为设置成2的幂次方,更有利于GPU加速。现在深度学习中,基本上都是用 mini-batch gradient descent,(在深度学习中,很多直接把mini-batch gradient descent(a.k.a stochastic mini-batch gradient descent)简称为SGD,所以当你看到深度学习中的SGD,一般指的就是mini-batch gradient descent)。下面用几张图来展示下mini-batch gradient descent的原理(图片来自ng deep learning 课):
- step1: 打乱数据:
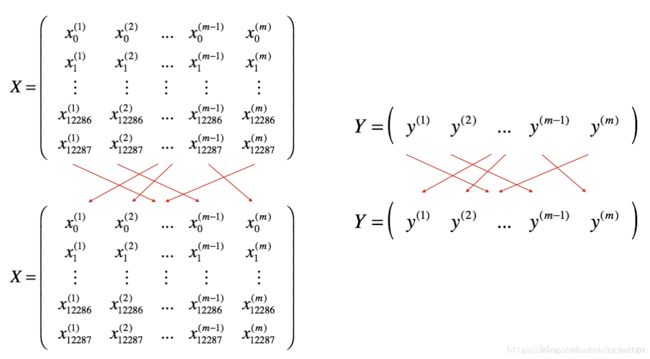
- step2:对数据集进行划分:
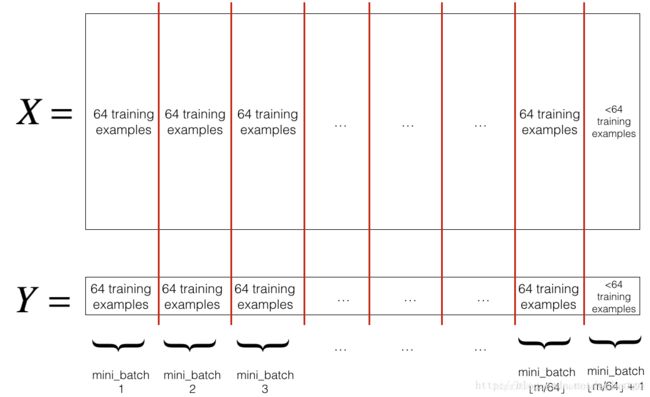
2. python实现算法: - 首先要把训练集分成多个batch
# GRADED FUNCTION: random_mini_batches
def random_mini_batches(X, Y, mini_batch_size = 64, seed = 0):
"""
Creates a list of random minibatches from (X, Y)
Arguments:
X -- input data, of shape (input size, number of examples)
Y -- true "label" vector (1 for blue dot / 0 for red dot), of shape (1, number of examples)
mini_batch_size -- size of the mini-batches, integer
Returns:
mini_batches -- list of synchronous (mini_batch_X, mini_batch_Y)
"""
np.random.seed(seed) # To make your "random" minibatches the same as ours
m = X.shape[1] # number of training examples
mini_batches = []
# Step 1: Shuffle (X, Y)
permutation = list(np.random.permutation(m))
shuffled_X = X[:, permutation]
shuffled_Y = Y[:, permutation].reshape((1,m))
# Step 2: Partition (shuffled_X, shuffled_Y). Minus the end case.
num_complete_minibatches = m//mini_batch_size # number of mini batches
for k in range(0, num_complete_minibatches):
mini_batch_X = shuffled_X[:, k * mini_batch_size: (k + 1) * mini_batch_size]
mini_batch_Y = shuffled_Y[:, k * mini_batch_size: (k + 1) * mini_batch_size]
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
# Handling the end case (last mini-batch < mini_batch_size)
if m % mini_batch_size != 0:
mini_batch_X = shuffled_X[:, num_complete_minibatches * mini_batch_size : m]
mini_batch_Y = shuffled_Y[:, num_complete_minibatches * mini_batch_size : m]
mini_batch = (mini_batch_X, mini_batch_Y)
mini_batches.append(mini_batch)
return mini_batches
- 下面是在model中使用mini-batch gradient descent 进行更新参数
seed = 0
for i in range(0, num_iterations):
# Define the random minibatches. We increment the seed to reshuffle differently the dataset after each epoch
seed = seed + 1
minibatches = random_mini_batches(X, Y, mini_batch_size, seed)
for minibatch in minibatches:
# Select a minibatch
(minibatch_X, minibatch_Y) = minibatch
# Forward propagation
AL, caches = forward_propagation(minibatch_X, parameters)
# Compute cost
cost = compute_cost(AL, minibatch_Y)
# Backward propagation
grads = backward_propagation(AL, minibatch_Y, caches)
parameters = update_parameters(parameters, grads, learning_rate)
下面来看mini-batch gradient descent 和 stochastic gradient descent 在下降时的对比图:
下面是mini-batch gradient descent的代价函数随着迭代次数的变化图:

从图中能够看出,mini-batch gradient descent 相对SGD在下降的时候,相对平滑些(相对稳定),不像SGD那样震荡的比较厉害。mini-batch gradient descent的一个缺点是增加了一个超参数 batch_sizebatch_size ,要去调这个超参数。
以上博文借鉴与:
随机梯度下降(Stochastic gradient descent)和 批量梯度下降(Batch gradient descent )的公式对比、实现对比.
几种梯度下降方法对比(Batch gradient descent、Mini-batch gradient descent 和 stochastic gradient descent).