矩阵分解之: 特征值分解(EVD)、奇异值分解(SVD)、SVD++
目录:
1.矩阵分解
1.1 矩阵分解的产生原因
1.2 矩阵分解作用
1.3 矩阵分解的方法
1.4 推荐学习的经典矩阵分解算法
2. 特征值分解(EVD)
3. 奇异值分解(SVD)
4. SVD++
5.SVD/SVD++在协同过滤中的应用
1. 矩阵分解
1.1 矩阵分解的产生原因
在介绍矩阵分解之前,先让我们明确下推荐系统的场景以及矩阵分解的原理。对于推荐系统来说存在两大场景即评分预测(rating prediction)与Top-N推荐(item recommendation,item ranking)。
- 评分预测场景主要用于评价网站,比如用户给自己看过的电影评多少分(MovieLens),或者用户给自己看过的书籍评价多少分。其中矩阵分解技术主要应用于该场景。
- Top-N推荐场景主要用于购物网站或者一般拿不到显式评分信息的网站,即通过用户的隐式反馈信息来给用户推荐一个可能感兴趣的列表以供其参考。其中该场景为排序任务,因此需要排序模型来对其建模。因此,我们接下来更关心评分预测任务。
对于评分预测任务来说,我们通常将用户和物品表示为二维矩阵的形式,其中矩阵中的某个元素表示对应用户对于相应项目的评分,1-5分表示喜欢的程度逐渐增加,?表示没有过评分记录。推荐系统评分预测任务可看做是一个矩阵补全(Matrix Completion)的任务,即基于矩阵中已有的数据(observed data)来填补矩阵中没有产生过记录的元素(unobserved data)。值得注意的是,这个矩阵是非常稀疏的(Sparse), 稀疏度一般能达到90%以上,因此如何根据极少的观测数据来较准确的预测未观测数据一直以来都是推荐系统领域的关键问题。
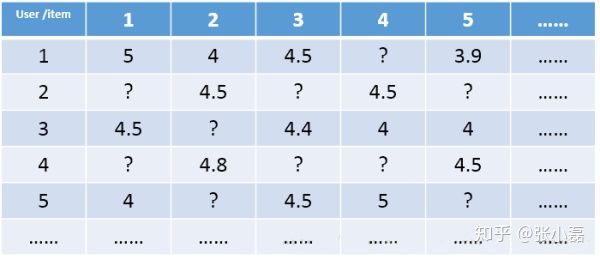
其中,推荐系统的评分预测场景可看做是一个矩阵补全的游戏,矩阵补全是推荐系统的任务,矩阵分解是其达到目的的手段。因此,矩阵分解是为了更好的完成矩阵补全任务(欲其补全,先其分解之)。之所以可以利用矩阵分解来完成矩阵补全的操作,那是因为基于这样的假设:假设UI矩阵是低秩的,即在大千世界中,总会存在相似的人或物,即物以类聚,人以群分,然后我们可以利用两个小矩阵相乘来还原它。
1.2 矩阵分解作用
- 矩阵填充(通过矩阵分解来填充原有矩阵,例如协同过滤的ALS算法就是填充原有矩阵)
- 清理异常值与离群点
- 降维、压缩
- 个性化推荐
- 间接的特征组合(计算特征间相似度)
1.3 矩阵分解的方法
-
特征值分解。
-
PCA(Principal Component Analysis)主成分分析,分解,作用:降维、压缩。
-
SVD(Singular Value Decomposition)分解,也叫奇异值分解。
-
LSI(Latent Semantic Indexing)或者叫LSA(Latent Semantic Analysis),隐语义分析分解。
-
PLSA(Probabilistic Latent Semantic Analysis),概率潜在语义分析。PLSA和LDA都是主题模型,PLSA是判别式模型。
-
NMF(Non-negative Matrix Factorization),非负矩阵分解。非负矩阵分解能够广泛应用于图像分析、文本挖掘和语言处理等领域。
-
LDA(Latent Dirichlet Allocation)模型,潜在狄利克雷分配模型。LDA是一种主题模型,将文档集中每篇文档的主题以概率的形式给出,可以用于主题聚类或者文本分类,是生成式模型。LDA作为主题模型可以应用到很多领域,比如:文本情感分析、文本分类、个性化推荐、社交网络、广告预测等方面。
-
MF(Matrix Factorization)模型,矩阵分解模型。矩阵分解其实可以分为很多种:
- 基本矩阵分解(Basic Matrix Factorization),basic MF分解。
-
正则化矩阵分解(Regularized Matrix Factorization)。
-
概率矩阵分解(Probabilistic Matrix Factorization),PMF。
-
非负矩阵分解(Non-negative Matrix Factorization),NMF。
-
正交非负矩阵分解(Orthogonal Non-negative Matrix Factorization)。
-
PMF(Probabilistic Matrix Factorization),概率矩阵分解。
-
SVD++
关于矩阵分解的方法大概就是上面这些。矩阵分解的主要应用是:降维、聚类分析、数据预处理、低维度特征学习、特征学习、推荐系统、大数据分析等。上面把主要的矩阵分解方法给列出来了,比较混乱,再给大家摆上一张矩阵分解发展的历史:
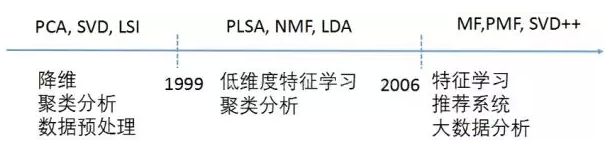 图1:矩阵分解发展历史
图1:矩阵分解发展历史
1.3 推荐学习的经典矩阵分解算法
矩阵分解的算法这么多,给大家推荐几个经典的算法来学习:
1) 经典的主成分分析(PCA)、奇异值分解(SVD)是机器学习入门必学算法。
2)2003年提出的主题模型(LDA),在当年提出的时候,也是大红大紫,现在也在广泛的应用,可以学习一下。
3)概率矩阵分解(PMF),主要应用到推荐系统中,在大规模的稀疏不平衡Netflix数据集上取得了较好的结果。
4)非负矩阵分解(NMF),也很重要。非负矩阵分解及其改进版本应用到很多领域中。
2.特征值分解(EVD)-理论推导
特征值分解和奇异值分解在机器学习中都是很常见的矩阵分解算法。两者有着很紧密的关系,特征值分解和奇异值分解的目的都是一样,就是提取出一个矩阵最重要的特征。
1)特征值、特征向量
如果一个向量v是矩阵A的特征向量,将一定可以表示成下面的形式:
![]()
其中,λ是特征向量v对应的特征值,一个矩阵的一组特征向量是一组正交向量。
思考:为什么一个向量和一个数相乘的效果与一个矩阵和一个向量相乘的效果是一样的呢?
答案:矩阵A与向量v相乘,本质上是对向量v进行了一次线性变换(旋转或拉伸),而该变换的效果为常数λ乘以向量v。当我们求特征值与特征向量的时候,就是为了求矩阵A能使哪些向量(特征向量)只发生伸缩变换,而变换的程度可以用特征值λ表示。矩阵变换遵循:左乘是进行初等行变换,右乘是进行初等列变换。Ref:初等矩阵左乘右乘 影响矩阵行列变换
2)特征值与特征向量的几何意义
一个矩阵其实就是一个线性变换,因为一个矩阵乘以一个向量后得到的向量,其实就相当于将这个向量进行了线性变换。比如说下面的这个矩阵:
它其实对应的线性变换是图2的形式:
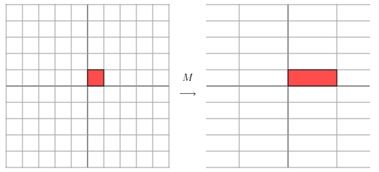 图2:矩阵M的线性变换
图2:矩阵M的线性变换
因为这个矩阵M乘以一个向量(x,y)的结果是:
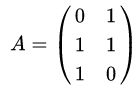
上面的矩阵是对称的,所以这个变换是一个对x、y轴的方向一个拉伸变换(每一个对角线上的元素将会对一个维度进行拉伸变换,当值大于1时是拉伸,当值小于1时是缩短),如图2所示。当矩阵不是对称的时候,假如说矩阵是下面的样子:
它所描述的变换是下面的样子:
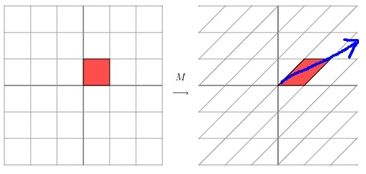 图3:M是非对称矩阵变换
图3:M是非对称矩阵变换
这其实是在平面上对一个轴进行的拉伸变换,如图3蓝色的箭头所示,蓝色的箭头是一个最主要的变换方向(变换的方向可能不止一个)。如果想要描述好一个变换,那我们就需要描述好这个变换主要的变化方向。
3)特征值分解
对于矩阵A,有一组特征向量v,将这组向量进行正交化单位化,就能得到一组正交单位向量。特征值分解,就是将矩阵A分解为如下式:
![]()
其中,Q是矩阵A的特征向量组成的矩阵,![]() 则是一个对角阵,对角线上的元素就是特征值。我们来分析一下特征值分解的式子,分解得到的Σ矩阵是一个对角矩阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变换方向(从主要的变化到次要的变化排列)。
则是一个对角阵,对角线上的元素就是特征值。我们来分析一下特征值分解的式子,分解得到的Σ矩阵是一个对角矩阵,里面的特征值是由大到小排列的,这些特征值所对应的特征向量就是描述这个矩阵变换方向(从主要的变化到次要的变化排列)。
当矩阵是高维的情况下,那么这个矩阵就是高维空间下的一个线性变换,这个线性变换可能没法通过图片来表示,但是可以想象,这个变换也同样有很多的变化方向,我们通过特征值分解得到的前N个特征向量,就对应了这个矩阵最主要的N个变化方向。我们利用这前N个变化方向,就可以近似这个矩阵变换。也就是之前说的:提取这个矩阵最重要的特征。
总结:特征值分解可以得到特征值与特征向量,特征值表示的是这个特征到底有多么重要,而特征向量表示这个特征是什么,可以将每一个特征向量理解为一个线性的子空间,我们可以利用这些线性的子空间干很多事情。不过,特征值分解也有很多的局限,比如说变换的矩阵必须是方阵。
4)特征值分解的例子
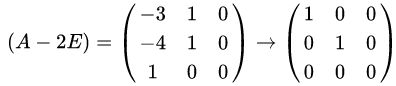
这里我们用一个简单的方阵来说明特征值分解的步骤。我们的方阵A定义为:

首先,由方阵A的特征方程,求出特征值。

特征值为![]() (重数是2)。
(重数是2)。
然后,把每个特征值λ带入线性方程组![]() ,求出特征向量。
,求出特征向量。
当λ=2时,解线性方程组 ![]() 。
。
解得![]() 。特征向量为:
。特征向量为: 。
。
当λ=1时,解线性方程组 ![]()
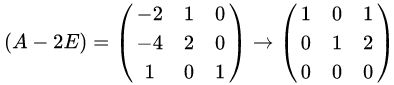
![]() 。特征向量为:
。特征向量为: 。
。
最后,方阵A的特征值分解为:

特征值特征向量的求解还可以参考求解矩阵特征值及特征向量
3. 奇异值分解(SVD)-理论推导
1)特征值分解矩阵的缺点: 只能针对方阵,但是我们要分解的大部分都不是方阵
我们前面讲了很多特征值、特征向量和特征值分解,而且基于我们以前学习的线性代数知识,利用特征值分解提取特征矩阵是一个容易理解且便于实现的方法。但是为什么还存在奇异值分解呢?特征值分解最大的问题是只能针对方阵,即n*n的矩阵。而在实际的应用中,我们分解的大部分都不是方阵。
举个例子:
关系型数据库中的某一张表的数据存储结构就类似于一个二维矩阵,假设这个表有m行,有n个字段,那么这个表数据矩阵规模就是m*n。很明显,在绝大部分情况下,m与n是不相等的。如果这个时候要对这个矩阵进行特征提取,特征值分解的方法明显就不行了。此时,就可以用SVD对非方阵矩阵进行分解。
2)奇异值分解
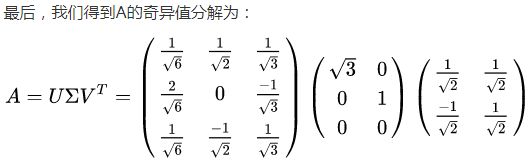
奇异值分解是一个能适用于任意矩阵的一种分解的方法,对于任意矩阵A总是存在一个奇异值分解:
![]()
假设A是一个m*n的矩阵,那么得到的U是一个m*m的方阵,U里面的正交向量被称为左奇异向量。Σ是一个m*n的矩阵,Σ除了对角线其它元素都为0,对角线上的元素称为奇异值。 是V的转置矩阵,是一个n*n的矩阵,它里面的正交向量被称为右奇异值向量。而且一般来讲,我们会将Σ上的值按从大到小的顺序排列。上面矩阵的维度变化可以参照图4所示。
是V的转置矩阵,是一个n*n的矩阵,它里面的正交向量被称为右奇异值向量。而且一般来讲,我们会将Σ上的值按从大到小的顺序排列。上面矩阵的维度变化可以参照图4所示。
 图4:奇异值分解中各个矩阵维度变化
图4:奇异值分解中各个矩阵维度变化
思考:虽说上面奇异值分解等式成立,但是如何求得左奇异向量、右奇异向量和奇异值呢?
答案:由上面的奇异值分解等式,我们是不知道如何拆分矩阵A的。我们可以把奇异值和特征值联系起来。
首先,我们将A和A的转置做矩阵的乘法,得到一个方阵,用这样的方阵进行特征分解,得到的特征和特征向量满足下面的等式:
![]()
这里的 ![]() 就是左奇异向量。
就是左奇异向量。
其次,我们用矩阵A的转置乘以A,得到一个方阵,用这样的方阵进行特征分解,得到的特征值和特征向量满足下面的等式:
![]()
这里的![]() 就是我们要求的右奇异向量。
就是我们要求的右奇异向量。
思考:上面我们说![]() 的特征向量组成的就是我们SVD中的U矩阵 ,而
的特征向量组成的就是我们SVD中的U矩阵 ,而![]() 的特征向量组成的矩阵就是我们SVD中的V矩阵,这有什么根据么?我们来证明一下,以V矩阵的证明为例。
的特征向量组成的矩阵就是我们SVD中的V矩阵,这有什么根据么?我们来证明一下,以V矩阵的证明为例。
![]()
上式证明中使用了![]() 。与特征值分解
。与特征值分解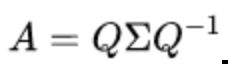 对比可以看出
对比可以看出![]() 的特征向量组成的矩阵就是我们SVD中的V矩阵,
的特征向量组成的矩阵就是我们SVD中的V矩阵, ![]() 的特征向量组成的就是我们SVD中的U矩阵。
的特征向量组成的就是我们SVD中的U矩阵。
补充定义:
![]()
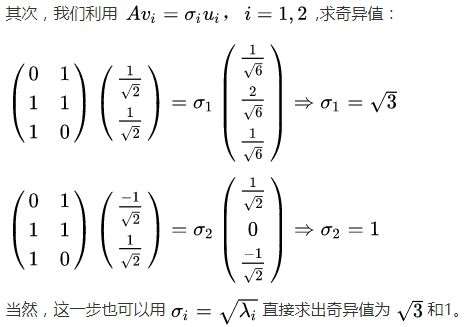
此外,我们还可以得到奇异值,奇异值求法有两种:
a) 第一种:

b)第二种:
通过上面公式的证明,我们还可以看出,特征值矩阵等于奇异值矩阵的平方,也就是说特征值和奇异值满足如下关系:
![]()
这里的![]() 就是奇异值,奇异值
就是奇异值,奇异值![]() 跟特征值类似,在矩阵Σ中也是从大到小排列。
跟特征值类似,在矩阵Σ中也是从大到小排列。
思考:我们已经知道如何用奇异值分解任何矩阵了,那么问题又来了,一个m*n的矩阵A,你把它分解成m*m的矩阵U、m*n的矩阵Σ和n*n的矩阵。这三个矩阵中任何一个的维度似乎一点也不比A的维度小,而且还要做两次矩阵的乘法,这不是没事找事干嘛!把简单的事情搞复杂了么!并且我们知道矩阵乘法的时间复杂度为![]() 。那奇异值分解到底要怎么做呢?
。那奇异值分解到底要怎么做呢?
补充:两个矩阵A:m*n,B:n*p相乘,时间复杂度(O(nmp))。分析伪代码如下:
input:int A[m,n],B[n,p]
Let C be a new matrix of the appropriate size
for i in 1 to m
for j in 1 to p
Let sum = 0
for k in 1 to n
sum += A[i,k]*B[k,j]
Set Cij = sum所以两个矩阵相乘的时间复杂度是![]() 。
。
答案:在奇异值分解矩阵中Σ里面的奇异值按从大到小的顺序排列,奇异值![]() 从大到小的顺序减小的特别快。在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上。也就是说,剩下的90%甚至99%的奇异值几乎没有什么作用。因此,我们可以用前面r个大的奇异值来近似描述矩阵,于是奇异值分解公式可以写成如下:
从大到小的顺序减小的特别快。在很多情况下,前10%甚至1%的奇异值的和就占了全部的奇异值之和的99%以上。也就是说,剩下的90%甚至99%的奇异值几乎没有什么作用。因此,我们可以用前面r个大的奇异值来近似描述矩阵,于是奇异值分解公式可以写成如下:
![]()
其中r是一个远远小于m和n的数,右边的三个矩阵相乘的结果将会使一个接近A的矩阵。如果r越接近于n,则相乘的结果越接近于A。如果r的取值远远小于n,从计算机内存的角度来说,右边三个矩阵的存储内存要远远小于矩阵A的。所以在奇异值分解中r的取值很重要,就是在计算精度和时间空间之间做选择。
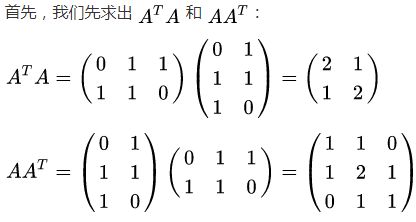
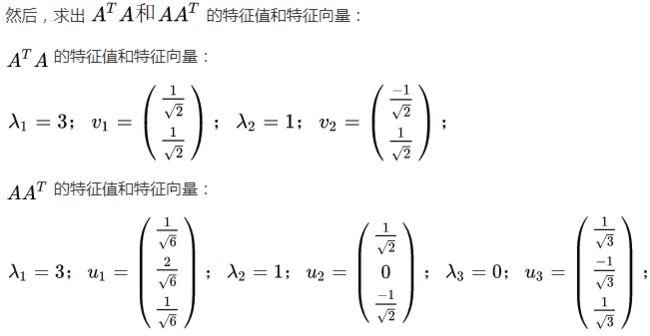
3)SVD计算举例
这里我们用一个简单的矩阵来说明奇异值分解的步骤。我们的矩阵A定义为:
3.3 SVD分解的应用
异值分解的应用有很多,比如:用SVD解PCA、潜在语言索引也依赖于SVD算法。可以说,SVD是矩阵分解、降维、压缩、特征学习的一个基础的工具,所以SVD在机器学习领域相当的重要。
1)降维。
通过奇异值分解的公式,我们可以很容易看出来,原来矩阵A的特征有n维。经过SVD分解后,可以用前r个非零奇异值对应的奇异向量表示矩阵A的主要特征,这样就把矩阵A进行了降维。
2)压缩。
通过奇异值分解的公式,我们可以看出来,矩阵A经过SVD分解后,要表示原来的大矩阵A,我们只需要存储U、Σ、V三个较小的矩阵即可。而这三个较小规模的矩阵占用内存上也是远远小于原有矩阵A的,这样SVD分解就起到了压缩的作用。
4.SVD/SVD++ 应用于协同过滤(附Python实现)
上面第二、三节完成了SVD、SVD++的理论推导,证明了要预测用户对电影的评分,也就是补全稀疏U-I矩阵中的缺省值,但是这个矩阵稀疏度一般能达到90%,很难通过极少的观测数据来预测缺省值,要完成矩阵补全可以通过将m*n维的U-I矩阵进行SVD/SVD++矩阵分解得到矩阵![]() 、
、![]() ,用这两个小矩阵相乘来还原他,这两个小矩阵都是稠密矩阵,可以通过训练得到。因此接下来我们要讨论的就是怎么根据训练样本得到
,用这两个小矩阵相乘来还原他,这两个小矩阵都是稠密矩阵,可以通过训练得到。因此接下来我们要讨论的就是怎么根据训练样本得到![]() 、
、![]() 。
。
4.1 奇异值分解(SVD)
考虑CF中最为常见的用户给电影评分的场景,我们需要一个数学模型来模拟用户给电影打分的场景,比如对评分进行预测。
将评分矩阵U看作是两个矩阵的乘积:
其中,uxy 可以看作是user x对电影的隐藏特质y的热衷程度,而iyz可以看作是特质 y 在电影 z中的体现程度。那么上述模型的评分预测公式为:

q 和 p 分别对应了电影和用户在各个隐藏特质上的特征向量。
以上的模型中,用户和电影都体现得无差别,例如某些用户非常挑剔,总是给予很低的评分;或是某部电影拍得奇烂,恶评如潮。为了模拟以上的情况,需要引入 baseline predictor.

其中 μ 为所有评分基准,bi 为电影 i 的评分均值相对μ的偏移,bu 类似。注意,这些均为参数,需要通过训练得到具体数值,不过可以用相应的均值作为初始化时的估计。
模型参数bi,bu,qi,pu通过最优化下面这个目标函数获得:

可以用梯度下降方法或迭代的最小二乘算法求解。在迭代最小二乘算法中,首先固定pu优化qi,然后固定qi优化pu,交替更新。梯度下降方法中参数的更新式子如下(为了简便,把目标函数中的μ+bi+bu+q⊤ipu整体替换为r^ui):
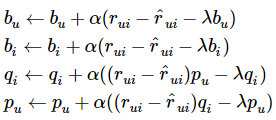
其中α是更新步长。
具体代码请参考:SVD --应用于协同过滤(附Python实现)
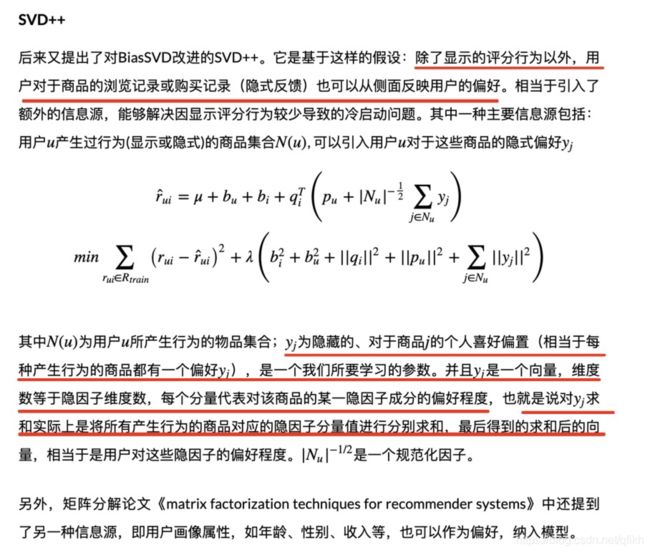
4.2 SVD++:
某个用户对某个电影进行了评分,那么说明他看过这部电影,那么这样的行为事实上蕴含了一定的信息,因此我们可以这样来理解问题:评分的行为从侧面反映了用户的喜好,可以将这样的反映通过隐式参数的形式体现在模型中,从而得到一个更为精细的模型,便是 SVD++.

其中 I(u) 为该用户所评价过的所有电影的集合,yj为隐藏的“评价了电影 j”反映出的个人喜好偏置。收缩因子取集合大小的根号是一个经验公式,并没有理论依据。
模型参数bi,bu,qi,pu,yj通过最优化下面这个目标函数获得:
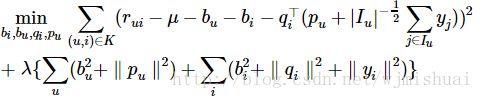
与SVD方法类似,可以通过梯度下降算法进行求解。
具体代码请参考:SVD应用于协同过滤改良版之SVD++(附Python实现)
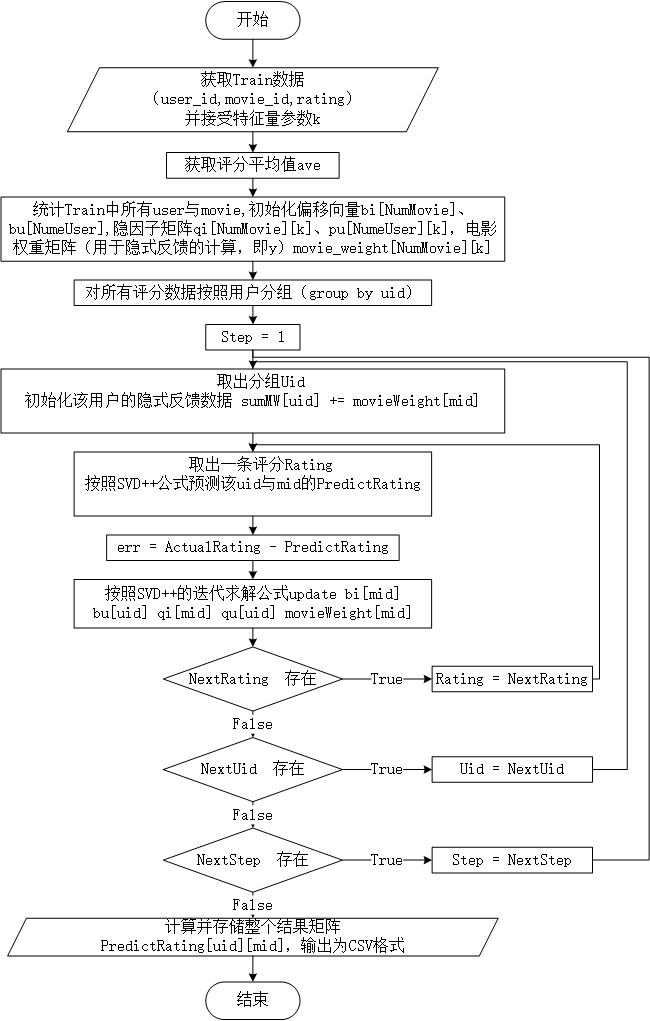
具体训练步骤:
1.首先根据统计数据对矩阵U、V,bi,bu,y进行初始化
2.根据已知参数计算评分预测值p
3.根据误差,利用随机梯度下降法 对参数进行更新。
Ref:
SVD与SVD++ https://www.cnblogs.com/nolonely/p/7337619.html
SVD应用于协同过滤改良版之SVD++(附Python实现) https://zhuanlan.zhihu.com/p/42269534
推荐系统之矩阵分解家族 https://zhuanlan.zhihu.com/p/35262187
机器学习中SVD总结 https://mp.weixin.qq.com/s/Dv51K8JETakIKe5dPBAPVg