湍流退化图像复原如何使用matlab,一种基于相关最大性的湍流退化图像复原方法与流程...
本发明涉及退化图像复原方法,特别涉及一种大气湍流图像复原问题,属于多帧湍流图像复原领域。
背景技术:
在中远距离成像系统中,由于风速、温度等影响造成的大气湍流现象,使得传播介质折射率不规则变化,导致光波在介质中传播时产生畸变,从而造成采集图像的几何形变和模糊。因此,从湍流退化图像中有效复原原始目标图像是实现对目标探测、识别等处理的关键问题之一。
常用的湍流退化图像复原方法主要基于单帧和多帧湍流图像的复原方法。由于湍流很强的随机性,从而使对静置物体所采集的图像模糊程度在时间和空间上存在不确定性,基于多帧图像互补性的复原效果优于基于单帧图像的复原结果。因此,大多采用基于多帧图像的复原方法,目前提出的主要方法有:
利用大量采集的短曝光图像中存在“幸运图像”的可能性进行复原。这种方法是先利用图像配准的方法对获取的湍流图像进行配准,消除几何形变,从配准后的多帧图像中提取出“高质量”的图像,通过图像融合成为一张图像,再基于图像解卷积或图像增强的方式对融合后的图像进行处理,提高图像的清晰度。如专利cn103310486b公开一种大气湍流退化图像重建方法。该技术方案是先进行多帧配准消除畸变图像,再重建基于时空近邻组合的衍射模糊图像,最后采用全局一致反卷积消除衍射模糊。该类方法计算复杂,且耗时长,配准的精度直接影响最后的复原效果。
利用多帧图像估计点扩散函数的初值,通过不断循环迭代,在时域或空域上,利用解卷积得到复原图像,如最大似然估计迭代盲反卷积复原方法、richardson-lucy算法等。但是,通过估计点扩散函数再解卷积的方式无法有效去除噪声,因此极易导致复原结果产生振铃效应。
d.li和r.m.meraereau等提出一种基于主成分分析法的湍流退化图像复原算法,该方法是基于高频成分增强的思想恢复退化图像,将方差最大的第一主成分作为最大的高频成分,得到复原图像(ieeegeosci.remotes.2007;4(3):340-344)。该方法其实质是一种基于主成分分析法的盲去卷积恢复方法,具有快速及抗噪性强的特点,不仅可以用于多帧退化图像恢复,也可用于单帧退化图像恢复。由于主成分分析法利用的特征分解具有不确定性,因此,无法保证所计算的高频分量与均值图像的方向一致性,可能会得不到期望的复原图像。另外,该方法是将整个退化图像看成是模糊空不变图像,并不适用于实际的湍流退化图像。
技术实现要素:
本发明提供了一种基于相关最大性的湍流退化图像复原方法,其基本思想是将采集的多帧图像分割成多个模糊图像空不变的子模块图像集,基于主成分分析法和图像最大相似性特征,得到最终复原的子模块图像,实现对湍流图像的复原,详见下文描述:
一种基于相关最大性的湍流退化图像复原方法,所述方法包括以下步骤:
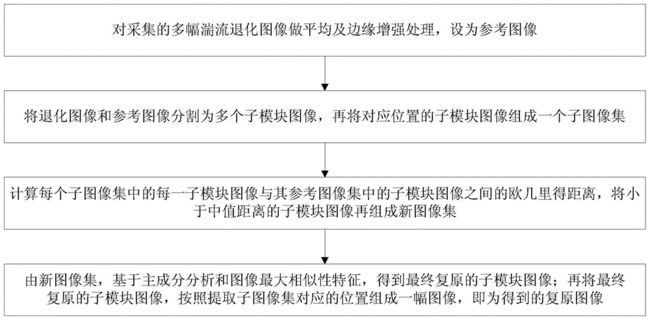
对采集的多幅湍流退化图像做平均及边缘增强处理,设为参考图像;
将退化图像和参考图像分割为多个子模块图像,再将对应位置的子模块图像组成一个子图像集;
计算每个子图像集中的每一子模块图像与其参考图像集中的子模块图像之间的欧几里得距离,将小于中值距离的子模块图像再组成新图像集;
由新图像集,基于主成分分析法和图像最大相似性特征,得到最终复原的子模块图像;再将最终复原的子模块图像,按照提取子图像集对应的位置组成一幅图像,即为得到的复原图像。
所述由新图像集,基于主成分分析法和图像最大相似性特征,得到最终复原的子模块图像具体为:
将新图像集中的a幅子模块图像矩阵转化为一个b尺寸的列矩阵,将所有的列矩阵组成一个b×a的矩阵c;
计算矩阵c的均值列矩阵,再将新图像集中每一个列矩阵与均值列矩阵相减,得到矩阵x;
根据矩阵x、均值列矩阵、权值系数获取结果行矩阵,将结果行矩阵转化为与子模块图像矩阵尺寸对应大小的矩阵,即为结果子图像,将该结果子图像作为最终复原的子模块图像。
所述根据矩阵x、均值图像、权值系数获取行矩阵具体为:
获取权值系数与矩阵x的转置的乘积,该乘积与权值系数的模做商,该商与均值列矩阵转置相加,即为行矩阵。
另外,当对受湍流扰动影响大的图像集进行处理时,所述方法还包括:
将复原的子图像设为新的参考图像,计算新图像集中的每一子模块图像与该参考图像之间的欧几里得距离,将小于中值距离的子模块图像再组成新的子模块图像集,对该图像集进行处理得到复原子模块图像。依次进行多次处理,重复次数依所处理的退化图像而定。
本发明提供的技术方案的有益效果是:
1、本发明结合了主成分与原始图像最大相似性特征,保证所计算的高频分量与均值图像的方向一致性,得到了期望的复原图像;
2、本方法将采集的多帧图像和与之对应的参考图像分割成多个模糊图像空不变的子模块图像集,尤其适用于实际的湍流退化图像。
附图说明
图1为本发明提出的一种基于相关最大性的湍流退化图像复原方法流程图;
图2为本发明提出的一种基于相关最大性的湍流退化图像复原方法的详细流程图;
图3为本发明实例中模拟的15幅受湍流影响的月球表面图像、参考图像及其分割的子模块图像集;
其中,(a)为模拟的15幅湍流退化图像;(b)为将15幅退化图像分割、组合的16个子图像集;(c)为由15幅湍流退化图像得到的参考图像;(d)为参考图像分割的16个子图像。
图4为本发明实例的复原图像。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面对本发明实施方式作进一步地详细描述。
下面以图3所示的退化图像为例,阐述本发明退化图像复原方法的具体处理过程;
步骤1、模拟15幅受湍流影响的月球表面图像gi(i=1,2,…,15,大小为256×256象素数),如图3(a)所示,计算其均值图像对均值图像φ,利用拉普拉斯滤波器进行增强处理,如图3(c)所示,将其设为参考图像ψ;
步骤2、对每一gi图像和参考图像ψ,分割为大小为106×106象素数,相邻两个子模块之间的间隔为nexp=50象素数的16个子模块图像,如图3(a)所示。再将对应位置的子模块图像组成一个子图像集,分别记为gj和ψj,其中,j=1,2,…,16,每个gj中包含15个子模块图像,如图3(b)所示,每个ψj只包含一个子模块图像,如图3(d)所示;
步骤3、对g1中的每一子模块图像,计算其与ψ1的欧几里得距离z1,i,再将
z1,i<median(z1)的子模块图像组成一个新图像集,记为中包含7幅子模块图像,其中,median(z1)为所计算的欧几里得距离z1,i中的中值;
步骤4、将中的7幅子模块图像矩阵转化为一个11236×1的列矩阵,再将所有的列矩阵组成一个11236×7的矩阵
步骤5、计算步骤4所得到的矩阵的均值图像再将中每一个列矩阵与φ1相减,得到矩阵x1=[x1,1,x2,1,…,x7,1],其中,p=1,2,…,7;
步骤6、由式计算y1,其中,为x1的转置矩阵,为φ1的转置矩阵,权值系数μ1为:
将所得到的行矩阵y1转化为106×106大小的矩阵,即为结果子图像fg1。将该结果子图像fg1作为最终复原的子模块图像fg1;
步骤7、再对g2,g3,...,g16,依次方法,利用步骤3~6进行处理,将得到相应的最终复原的子图像fg2,fg3,...,fg16;
步骤8、再按照提取子图像集对应的位置重组为一幅图像,对重叠部分的图像进行叠加平均,得到复原图像fg,如图4所示。
本领域技术人员可以理解附图只是一个优选实施例的示意图,上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。