数字图像处理-美图秀秀:大眼算法
简介
本项目是以matlab为主语言并设计GUI界面的一款简易美图秀秀,包含基础的图像处理和一些常见美颜算法
对于一些matlab较难实现的算法采用C++或python来实现
⭐️ github地址:https://github.com/mibbp/MeituShow
里面有我完整的代码,你想直接运行记得看readme配置一下环境,本博客更多的是讲解原理
具体功能包括:
- 增加图像亮度,对比度
- 美白人像
- 采用双边滤波算法磨皮
- 采用液化算法并用dlib提取特征点实现瘦脸
- 基于液化算法并用dlib提取特征点实现大眼
- 采用dlib提取特征点,采用Andrew求凸包并用BFS实现唇彩
- 采用SRCNN超分辨率算法实现提升照片像素
- 采用Beauty-GAN算法实现彩妆迁移
大眼算法
这里和上一个瘦脸算法是一个东西其实,所以就不过多去讲原理了,就是逆变换了一下,就瘦脸我们说的是一个范围他往里收缩,越靠近中心收缩强度越大,越靠近边界越小,边界外不收缩,而大眼则是放过来,我们越靠近中心变化越小,越靠近边界变化越大,边界外不变,先说原版的我这里做了一点优化
原版
以眼睛中心为中心点,对眼睛区域向外放大,就实现了大眼的效果。大眼的基本公式如下
f s ( r ) = ( 1 − ( r r m a x − 1 ) 2 a ) r f_s(r) = \big(1-( \frac{r}{r_{max}} -1 )^2 a\big)r fs(r)=(1−(rmaxr−1)2a)r
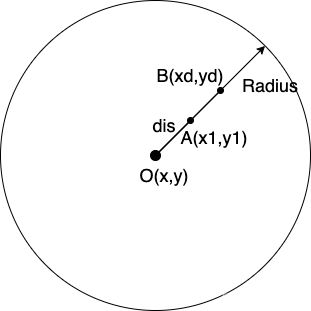
假设眼睛中心点为 O ( x , y ) O(x,y) O(x,y),大眼区域半径为 R a d i u s Radius Radius,当前点位为 A ( x 1 , y 1 ) A(x1,y1) A(x1,y1),对其进行改进,加入大眼程度形变强度变量Strength,其中Strength的取值范围为0~100。
d i s 2 = ( x 1 − x ) 2 + ( y 1 − y ) 2 K 0 = S t r e n g t h / 100.0 k = 1.0 − ( 1.0 − d i s 2 R a d i u s 2 ) K 0 x d = ( x 1 − x ) k + x y d = ( y 1 − y ) k + y dis^2 = (x_1-x)^2 + (y_1 - y)^2 \\ K_0 = Strength/100.0 \\ k = 1.0 - (1.0-\frac{dis^2}{Radius^2})K_0 \\ x_d = (x_1 - x)k+x y_d = (y_1 - y)k+y dis2=(x1−x)2+(y1−y)2K0=Strength/100.0k=1.0−(1.0−Radius2dis2)K0xd=(x1−x)k+xyd=(y1−y)k+y
Mbp-ImageWarping
原版的有一个最关键的问题就是眼睛是椭圆,你用圆形的效果并不是很好,你用圆形公式计算的中心半径啥的都不是准确的,所以这里我自己优化了一下,改成椭圆的了,中间肯定会涉及大量计算几何,如果我还是高三那我秒解,但是我现在大三了所以可能会有某些地方写的很冗余
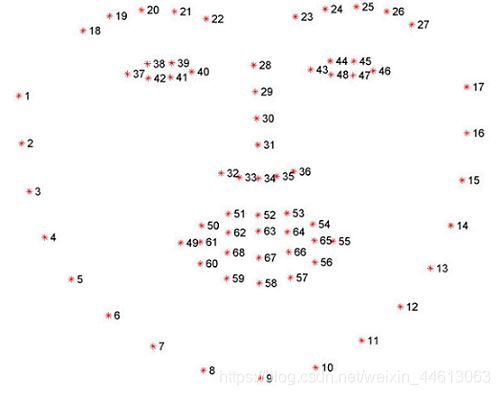
首先,你的先计算出眼睛的一个椭圆方程,这样才好方便接下来的计算,那这时候就得需要根据眼睛的特征点来计算,首先你要知道如果是以dlib 68特征点模型提取人脸特征点的话那么37 ~ 42就是左眼,43 ~ 48就是右眼,这里就以左眼做讲解
我一开始的设计是求出38,42的中点,求出39,41中点,然后以这俩中点作为焦点,然后以三直线相交形成的三角形的中心作为中心

但是后来我发现可以直接拟合这六个特征点求出椭圆方程
Eye = []
for i in range(startIndex, endIndex+1):
# startIndex就是眼睛起始特征点比如左眼就是37,end就是终点
# landmarks_node是提取的68个特征点
Eye.append([landmarks_node[i][0, 0], landmarks_node[i][0, 1]])
ellipseEye = cv2.fitEllipse(np.array(Eye))
# ellipse_Eye[0] 椭圆中心
# ellipse_Eye[1] 短轴和长轴
# 其他属性可以网上自查
然后就可以根据拟合出的椭圆建立椭圆方程,然后计算出椭圆的焦点,焦距,短轴,长轴等基本属性
然后套上面那个圆的公式就好了
代码
import dlib
import cv2
import numpy as np
import math
predictor_path = 'D:/dlib-shape/shape_predictor_68_face_landmarks.dat'
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(predictor_path)
def landmark_dec_dlib_fun(img_src):
img_gray = cv2.cvtColor(img_src, cv2.COLOR_BGR2GRAY)
land_marks = []
rects = detector(img_gray, 0)
for i in range(len(rects)):
land_marks_node = np.matrix([[p.x, p.y] for p in predictor(img_gray, rects[i]).parts()])
land_marks.append(land_marks_node)
return land_marks
def getEllipseCross(p1x, p1y, p2x, p2y, a, b, centerX, centerY):
resx = 0
resy = 0
k = (p1y - p2y) / (p1x - p2x);
m = p1y - k * p1x;
A = (b * b + (a * a * k * k))
B = 2 * a * a * k * m
C = a * a * (m * m - b * b)
X1 = (-B + math.sqrt(B * B - (4 * A * C))) / (2 * A)
X2 = (-B - math.sqrt(B * B - (4 * A * C))) / (2 * A)
# Y1 = math.sqrt(1 - (b * b * X1 * X1 ) / (a * a) )
# Y2 = math.sqrt(1 - (b * b * X2 * X2 ) / (a * a) )
Y1 = k * X1 + m
Y2 = k * X2 + m
if getDis(p2x, p2y, X1, Y1) < getDis(p2x, p2y, X2, Y2):
resx = X1
resy = Y1
else:
resx = X2
resy = Y2
return [resx + centerX, resy + centerY]
def getLinearEquation(p1x, p1y, p2x, p2y):
sign = 1
a = p2y - p1y
if a < 0:
sign = -1
a = sign * a
b = sign * (p1x - p2x)
c = sign * (p1y * p2x - p1x * p2y)
return [a, b, c]
def getDis(p1x, p1y, p2x, p2y):
return math.sqrt((p1x - p2x) * (p1x - p2x) + (p1y - p2y) * (p1y - p2y))
def get_line_cross_point(p1x, p1y, p2x, p2y, p3x, p3y, p4x, p4y):
# print(p1x, p1y)
# print(p2x, p2y)
# print(p3x, p3y)
# print(p4x, p4y)
a0, b0, c0 = getLinearEquation(p1x, p1y, p2x, p2y)
a1, b1, c1 = getLinearEquation(p3x, p3y, p4x, p4y)
# print(a0,b0,c0)
# print(a1,b1,c1)
D = a0*b1-a1*b0
if D==0:
return None
x = (b0*c1-b1*c0)/D
y = (a1*c0-a0*c1)/D
return x, y
def localTranslationWarp(srcImg, startIndex, endIndex,Strength,landmarks_node):
midIndex = (startIndex + endIndex + 1) >> 1
startDot = landmarks_node[startIndex]
endDot = landmarks_node[endIndex]
midDot = landmarks_node[midIndex]
Eye = []
for i in range(startIndex, endIndex+1):
Eye.append([landmarks_node[i][0, 0], landmarks_node[i][0, 1]])
ellipseEye = cv2.fitEllipse(np.array(Eye))
# cv2.ellipse(srcImg, ellipseEye, (0, 255, 0), 1)
# cv2.imshow("eli",srcImg)
radius = math.sqrt(
(startDot[0, 0] - midDot[0, 0]) * (startDot[0, 0] - midDot[0, 0]) -
(startDot[0, 1] - midDot[0, 1]) * (startDot[0, 1] - midDot[0, 1])
) / 2
list = []
for i in range(0,3):
tmplist = []
tmplist = get_line_cross_point(
landmarks_node[startIndex + i][0, 0], landmarks_node[startIndex + i][0, 1],
landmarks_node[midIndex + i][0, 0], landmarks_node[midIndex + i][0, 1],
landmarks_node[startIndex + ((i + 1) % 3)][0, 0], landmarks_node[startIndex + ((i + 1) % 3)][0, 1],
landmarks_node[midIndex + ((i + 1) % 3)][0, 0], landmarks_node[midIndex + ((i + 1) % 3)][0, 1]
)
list.append(tmplist)
# for l in list:
# print(l)
a = getDis(list[0][0], list[0][1], list[1][0], list[1][1])
b = getDis(list[1][0], list[1][1], list[2][0], list[2][1])
c = getDis(list[2][0], list[2][1], list[0][0], list[0][1])
centerX = (a * list[0][0] + b * list[1][0] + c * list[2][0]) / (a + b + c)
centerY = (a * list[0][1] + b * list[1][1] + c * list[2][1]) / (a + b + c)
# print(centerX)
# print(centerY)
# print(" ")
width, height, cou = srcImg.shape
Intensity = 15*512*512/(width*height)
ddradius = float(radius * radius)
copyImg = np.zeros(srcImg.shape, np.uint8)
copyImg = srcImg.copy()
K0 = Strength / 100.0
# 计算公式中的|m-c|^2
eyeWidth = radius
eyeHeight = getDis((landmarks_node[startIndex+1][0, 0] + landmarks_node[startIndex+2][0, 0]) / 2,
(landmarks_node[startIndex+1][0, 1] + landmarks_node[startIndex+2][0, 1]) / 2,
(landmarks_node[midIndex+1][0, 0] + landmarks_node[midIndex+2][0, 0]) / 2,
(landmarks_node[midIndex+1][0, 1] + landmarks_node[midIndex+2][0, 1]) / 2)
centerX = ellipseEye[0][0]
centerY = ellipseEye[0][1]
ellipseA = ellipseEye[1][1]
ellipseB = ellipseEye[1][0]
ellipseC = math.sqrt(ellipseA * ellipseA - ellipseB * ellipseB)
# print(ellipseA, ellipseB, ellipseC)
# print(centerX, centerY)
# ddmc = (endX - startX) * (endX - startX) + (endY - startY) * (endY - startY)
#
for i in range(width):
for j in range(height):
# 计算该点是否在形变圆的范围之内
# 优化,第一步,直接判断是会在(startX,startY)的矩阵框中
# if math.fabs(i - centerX) > ((eyeHeight / 2) * 1.5) or math.fabs(j - centerY) > ((eyeWidth / 2) * 1.5):
# continue
if getDis(i, j, centerX - ellipseC, centerY) + getDis(i, j, centerX + ellipseC, centerY) > 2 * ellipseA:
continue
print(i, j)
[crossX, crossY] = getEllipseCross(0, 0, i - ellipseEye[0][0], j - ellipseEye[0][1], ellipseEye[1][1],
ellipseEye[1][0], ellipseEye[0][0], ellipseEye[0][1])
print(crossX, crossY)
radius = getDis(centerX, centerY, crossX, crossY)
ddradius = radius * radius
distance = (i - centerX) * (i - centerX) + (j - centerY) * (j - centerY)
K1 = 1.0 - (1.0 - distance / ddradius) * K0
# 映射原位置
UX = (i - centerX) * K1 + centerX
UY = (j - centerY) * K1 + centerY
print(UX, UY)
# 根据双线性插值法得到UX,UY的值
value = BilinearInsert(srcImg, UX, UY)
# 改变当前 i ,j的值
copyImg[j, i] = value
return copyImg
# 双线性插值法
def BilinearInsert(src, ux, uy):
w, h, c = src.shape
if c == 3:
x1 = int(ux)
x2 = x1 + 1
y1 = int(uy)
y2 = y1 + 1
part1 = src[y1, x1].astype(np.float) * (float(x2) - ux) * (float(y2) - uy)
part2 = src[y1, x2].astype(np.float) * (ux - float(x1)) * (float(y2) - uy)
part3 = src[y2, x1].astype(np.float) * (float(x2) - ux) * (uy - float(y1))
part4 = src[y2, x2].astype(np.float) * (ux - float(x1)) * (uy - float(y1))
insertValue = part1 + part2 + part3 + part4
return insertValue.astype(np.int8)
def face_thin_auto(src,LStrength,RStrength):
landmarks = landmark_dec_dlib_fun(src)
# 如果未检测到人脸关键点,就不进行瘦脸
if len(landmarks) == 0:
return
for landmarks_node in landmarks:
# print(landmarks_node)
bigEyeImage = localTranslationWarp(src,36,41,LStrength,landmarks_node)
bigEyeImage = localTranslationWarp(bigEyeImage,42,47,RStrength,landmarks_node)
cv2.imshow('bigEye', bigEyeImage)
# cv2.imwrite('C:/Users/mibbp/Pictures/bigEye.jpg', bigEyeImage)
def main(LStrength, RStrength):
src = cv2.imread('C:/Users/mibbp/Pictures/bytest.jpg')
cv2.imshow('src', src)
face_thin_auto(src,LStrength,RStrength)
cv2.waitKey(0)
if __name__ == '__main__':
main()
运行结果对比
原图

原版

我的版本
