多目标灰太狼算法求解环境经济调度问题(IEEE30)(Matlab实现)
目录
0 概述
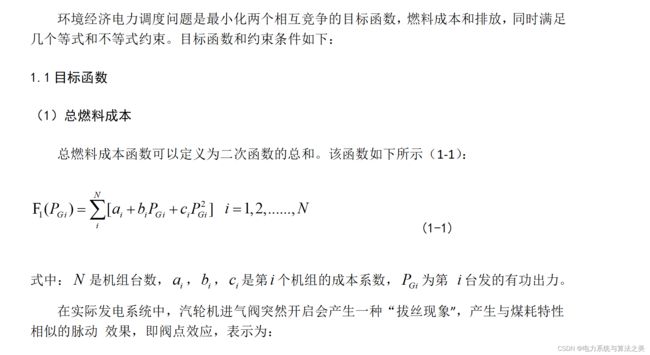
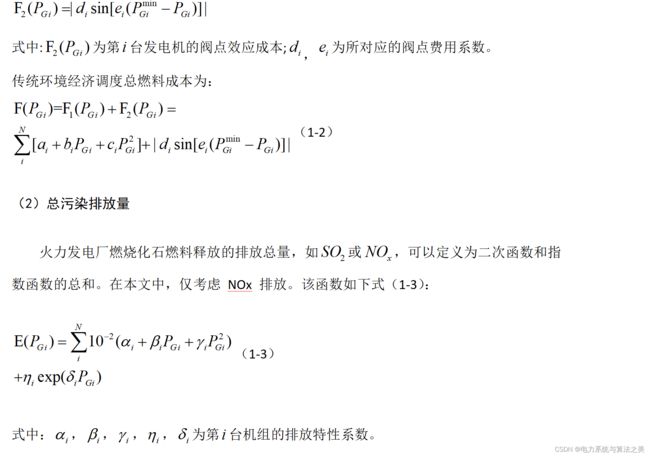
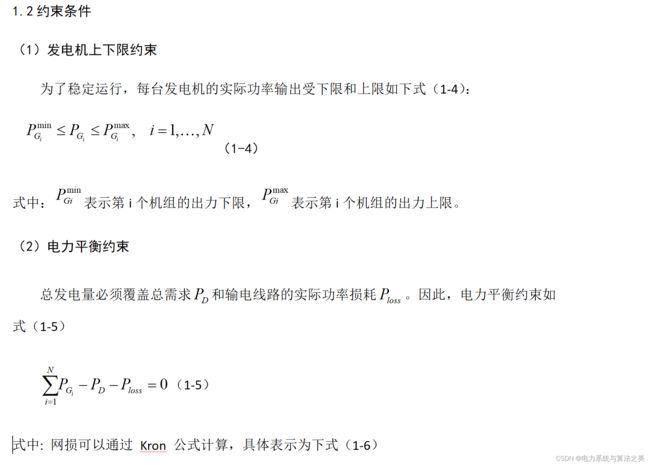
1 电力系统环境经济调度数学模型
2 知识回顾
3 讲解
4 结果
5 Matlab代码实现
0 概述
动态环境经济调度(DEED)模型已广泛用于电力系统调度决策。但由于 DEED模型考虑调度周期内各时段动态负荷需求及各机组的爬坡率,使得DEED问题属一类含约束的高维非线性多目标优化问题,亟待设计高效优化算法求解之。传统优化方法,如动态规划﹑梯度法和 Lagrange松弛法等的搜索效果很大程度依赖于初始点,且需要将多目标 DEED模型转换为单目标模型,这往往不能为决策者提供诸多决策方案。然而﹐基于群体智能的随机搜索算法能很好地解决多目标优化问题”﹐并表现出优越的约束处理能力,且一次循环可获多个Pareto解,决策者可根据不同偏好选取所需的解﹐从而指导决策调度。因此,设计高效群体智能优化算法为DEED模型的求解及辅助调度人员进行合理决策具有重要的理论和实际意义。
Zhu 等人4提出改进的分解多目标进化算法( improved multiobjective evolutionary algorithm based on decom-position with constraints handling, IMOEA/D-CH),引入机组出力实时调整和约束违背惩罚的策略,并采用目标归一化避免算法偏向某一目标搜索,实验结果表明该算法能获得分布均匀的Pareto前沿(Pareto front, PF),但所获的PF延展性较差。李晨等人5将DEED问题按时段分解为多个子问题﹐然后对每个子问题独立优化,将各子问题的 Pareto解组合作为 DEED问题的Pareto 解,该方法降低了问题的求解难度﹐但所获的Pareto解往往具有局部性。Basu基于传统差分进化( diffe
erentialevolution, DE)提出改进的多目标差分进化算法(multiobjectivedifferential evolution,MODE),采用二次方程求根法处理功率平衡等式约束,实验结果表明MODE所获的PF延展性优于NSGA-II,但其收敛速度慢。
1 电力系统环境经济调度数学模型

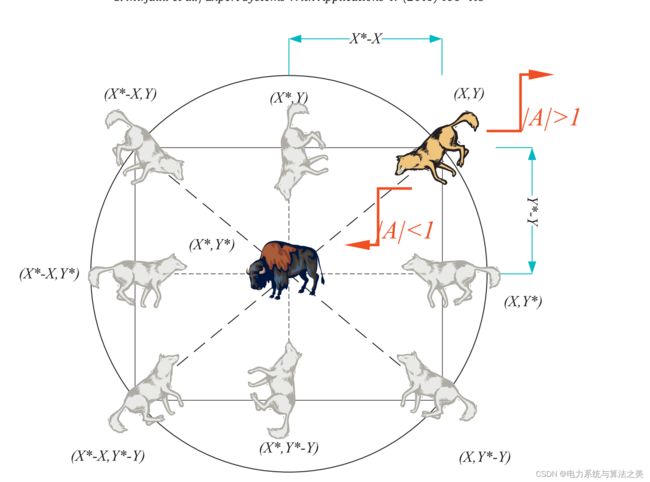
2 知识回顾
| 智能优化算法——灰狼优化算法(Python&Matlab实现) |
| 粒子群算法求解电力系统环境经济调度+微电网调度(风、光、电动车、柴油机、主网)(Python代码实现) |
3 讲解
部分代码:
function MultiObj = GetProblemInfo(TestProblem) %1个多目标工程应用
switch TestProblem
case 1 % IEEE30Bus 环境经济负荷分配问题
numOfObj=3; %目标函数个数
nVar=6; %机组个数【dimension of problem】
VarMin=0.05*ones(1,nVar);
VarMax=1.5*ones(1,nVar);
name='IEEE 30-bus';
CostFunction = @Bus30;
end
%===结构体MultiObj参数=====
MultiObj.nVar=nVar;
MultiObj.var_min = VarMin;
MultiObj.var_max =VarMax;
MultiObj.fun=CostFunction;
MultiObj.numOfObj=numOfObj;
MultiObj.name=name;
end
%% 30节点数据及目标函数
function f=Bus30(x)
%=========发电机参数===============
%第1台机组参数
a(1,1) = 10; %ai
a(1,2) = 200; %bi
a(1,3) = 100; %ci
a(1,4) = 4.091; %aerfa
a(1,5)= -5.543; %beita
a(1,6)= 6.490; %gama
a(1,7) = 2.0 * 10.^(-4); %segama
a(1,8) = 2.857; %yita
%第2台机组参数
a(2,1) = 10;
a(2,2) = 150;
a(2,3) = 120;
a(2,4) = 2.543;
a(2,5)= -6.047;
a(2,6)= 5.638;
a(2,7) = 5.0 *10.^(-4);
a(2,8) = 3.333;
%第3台机组参数
a(3,1) = 20;
a(3,2) = 180;
a(3,3) = 40;
a(3,4) = 4.258;
a(3,5) = -5.094;
a(3,6) = 4.586;
a(3,7) = 1.0 * 10.^(-6);
a(3,8) = 8.000;
%第4台机组参数
a(4,1)= 10;
a(4,2) = 100;
a(4,3) = 60;
a(4,4)= 5.326;
a(4,5) = -3.550;
a(4,6) = 3.380;
a(4,7) = 2.0 * 10.^(-3);
a(4,8) = 2.000;
%第5台机组参数
a(5,1) = 20;
a(5,2) = 180;
a(5,3) = 40;
a(5,4) = 4.258;
a(5,5) = -5.094;
a(5,6) = 4.586;
a(5,7) = 1.0 * 10.^(-6);
a(5,8) = 8.000;
%第6台机组参数
a(6,1) = 10;
a(6,2) = 150;
a(6,3) = 100;
a(6,4) = 6.131;
a(6,5)= -5.555;
a(6,6) = 5.151;
a(6,7) = 1.0 * 10.^(-5);
a(6,8) = 6.667;
%第1台机组Bij参数
B(1,1) = 0.1382;
B(1,2) = -0.0299;
B(1,3) = 0.0044;
B(1,4) = -0.0022;
B(1,5) = -0.0010;
B(1,6) = -0.0008;
%第2台机组Bij参数
B(2,1) = -0.0299;
B(2,2) = 0.0487;
B(2,3) = -0.0025;
B(2,4) = 0.0004;
B(2,5) = 0.0016;
B(2,6) = 0.0041;
%第3台机组Bij参数
B(3,1) = 0.0044;
B(3,2)= -0.0025;
B(3,3) = 0.0182;
B(3,4) = -0.0070;
B(3,5) = -0.0066;
B(3,6) = -0.0066;
%第4台机组Bij参数
B(4,1) = -0.0022;
B(4,2) = 0.0004;
B(4,3) = -0.0070;
B(4,4) = 0.0137;
B(4,5) = 0.0050;
B(4,6) = 0.0033;
%第6台机组Bij参数
B(5,1) = -0.0010;
B(5,2) = 0.0016;
B(5,3) = -0.0066;
B(5,4) = 0.0050;
B(5,5) = 0.0109;
B(5,6) = 0.0005;
%第6台机组Bij参数
B(6,1) = -0.0008;
B(6,2) = 0.0041;
B(6,3) = -0.0066;
B(6,4) = 0.0033;
B(6,5) = 0.0005;
B(6,6) = 0.0244;
B0 = [-0.0107,0.0060,-0.0017,0.0009,0.0002,0.0030 ]; %线损参数B0
B00 = 9.8573 * 10.^(-4); %线损参数B00
f1 = 0.0;
f2 = 0.0;
f3 = 0.0;
%===============总燃料成本======================
for i=1:6
f1 =f1+ (a(i,1) + a(i,2) * x(i) + a(i,3) * x(i).^(2)); %sum(ai+bi*PGi+ci*PGi^2)【xi-PGi】
end
%===============总排放量========================
for i=1:6
f2 = f2 + 0.01 * (a(i,4) + a(i,5) *x(i) + a(i,6) * x(i).^(2)) + a(i,7) * 2.718281828.^(a(i,8) * x(i));
end
%===============总线损====================
for i=1:6
for j=1:6
f3 = f3 + x(i) * B(i,j) * x(j);
end
end
for i=1:6
f3 =f3 + B0(i) * x(i);
end
f3 =f3 + B00;
% %% 不等式约束
% for i=1:6
% if x(i)PGmax(i)
% x(i)=unifrnd(PGmin(i),PGmax(i))
% end
%% 等式约束
g = 0;
Pd = 2.834; %PD负荷量
for i=1:6
g =g+ x(i); %sum(PGi)
end
g = g - Pd - f3; %sum(PGi)-PD-PL
g=max(0,abs(g));
%% 目标函数+惩罚项
f(1)=f1+g;
f(2)=f2+0.1*g;
f(3)=f3+g;
end

4 结果

