《深入浅出图神经网络》读书笔记(1-2基础知识回顾)
基础知识回顾
文章目录
- 基础知识回顾
-
- 1.图的概述
-
- 1.1 图的相关定义
- 1.2 图的存储和遍历
- 1.3 图的应用场景和发展
- 2.神经网络基础
-
- 2.1 机器学习分类:
- 2.2 机器学习流程
- 2.3 损失函数
- 2.4 梯度下降算法
-
- 2.4.1 梯度下降算法原理
- 2.4.2 梯度下降算法
- 2.5 神经网络
-
- 2.5.1 神经元
- 2.5.2 多层感知器
- 2.5.3 激活函数
-
- 2.5.3.1 Sigmoid型函数
- 2.5.3.2 ReLU函数
-
- a.带泄露的ReLU
- b.带参数的ReLU——PReLU
- 2.5.3.3 ELU函数
- 2.5.3.4 Softplus函数
- 2.5.3.5 Swish函数
- 2.5.3.6 GELU函数(高斯误差线性单元)
- 2.5.3.7 Maxout单元
- 2.5.4 训练神经网络
-
- 2.5.4.1 神经网络的运行过程
- 2.5.4.2 反向传播
- 2.5.5 优化困境
- 2.5.5 优化困境
1.图的概述
1.1 图的相关定义
顶点集合:V,顶点数为N
边集合:E,边数为M
图: G = ( V , E ) G=(V,E) G=(V,E)
无向边: ( v i , v j ) (v_i,v_j) (vi,vj)
有向边: e i j = < v i , v j > e_{ij}=
加权图:边上有数字
无权图:各边权重相同
连通图:无孤立节点
非连通图:有孤立节点
二部图:V划分为两个子集A,B,图中的任何一条边 e i j e_{ij} eij均符合条件 ( v i ∈ A a n d v j ∈ B ) o r ( v i ∈ B a n d v j ∈ A ) (v_i\in A \quad and \quad v_j\in B)or (v_i\in B \quad and \quad v_j\in A) (vi∈Aandvj∈B)or(vi∈Bandvj∈A)
邻居:存在一条边顶点 v i v_i vi连接 v j v_j vj,那么 v j v_j vj是 v i v_i vi的邻居,反之亦然。符号表示邻居集合 N ( v i ) N(v_i) N(vi)为
N ( v i ) = { v j ∣ ∃ e i j ∈ E o r e j i ∈ E } N(v_i)=\{v_j |\exists e_{ij} \in E \quad or \quad e_{ji}\in E\} N(vi)={vj∣∃eij∈Eoreji∈E}
度:以 v i v_i vi为端点的边的数目,记为 deg ( v i ) \text {deg}(v_i) deg(vi)
deg ( v i ) = ∣ N ( v i ) ∣ ∑ v i deg ( v i ) = 2 ∣ E ∣ \text{deg}(v_i)=|N(v_i)|\\ \sum_{v_i}\text{deg}(v_i)=2|E| deg(vi)=∣N(vi)∣vi∑deg(vi)=2∣E∣
出度:以 v i v_i vi为起点的边的数目。
入度:以 v i v_i vi为终点的边的数目。
子图:图 G = ( V , E ) , G ′ = ( V ′ , E ′ ) G=(V,E),G^{'}={(V^{'},E^{'})} G=(V,E),G′=(V′,E′)有 V ′ ⊆ V , E ′ ⊆ E V^{'}\subseteq V,E^{'}\subseteq E V′⊆V,E′⊆E,称图 G ′ G^{'} G′是图 G G G的子图。
路径:边序列 P i j = ( e v i P 1 , e P 1 P 2 , . . . , e P m v j ) P_{ij}=(e_{v_iP_1},e_{P_1P_2},...,e_{P_mv_j}) Pij=(eviP1,eP1P2,...,ePmvj)表示从顶点i到j的一条路径。
路径的长度: L ( P i j ) = ∣ P i j ∣ L(P_{ij})=|P_{ij}| L(Pij)=∣Pij∣.
顶点的距离: d ( v i , v j ) = min ( ∣ P i j ∣ ) d(v_i,v_j)=\min(|P_{ij}|) d(vi,vj)=min(∣Pij∣),两个顶点的距离由它们的最短路径决定。到自身距离为0.
k阶邻居:若 d ( v i , v j ) = k d(v_i,v_j)=k d(vi,vj)=k, v j v_j vj是 v i v_i vi的k阶邻居。
k阶子图:也叫k-hop。 v i v_i vi的k阶子图是 G v i ( k ) = ( V , E ) G_{v_i}^{(k)} =(V,E) Gvi(k)=(V,E), V ′ = { v j ∣ ∀ v j , d ( v i , v j ) ≤ k } , E ′ = e i j ∣ ∀ v j , d ( v i , v j ) ≤ k V^{'}=\{v_j|\forall v_j,d(v_i,v_j)\le k\},E^{'}={e_{ij}|\forall v_j,d(v_i,v_j)\le k} V′={vj∣∀vj,d(vi,vj)≤k},E′=eij∣∀vj,d(vi,vj)≤k。
1.2 图的存储和遍历
邻接矩阵:
A i j = { 1 , if ( v i , v j ) ⊆ E 0 , else A_{ij}= \begin{cases} 1 , \text{if}(v_i,v_j)\subseteq E\\ 0 ,\text{else} \end {cases} Aij={1,if(vi,vj)⊆E0,else
为节省空间,可以采用稀疏矩阵的格式存储。维度N*N。
关联矩阵:维度N*M。边用编号表示 e 1 , . . . , e j , . . . , e M e_1,...,e_j,...,e_M e1,...,ej,...,eM
B i j = { 1 , if v i 与 e j 相 连 0 , else B_{ij}= \begin{cases} 1,\text{if}\quad v_i与e_j相连 \\ 0 ,\text{else} \end {cases} Bij={1,ifvi与ej相连0,else
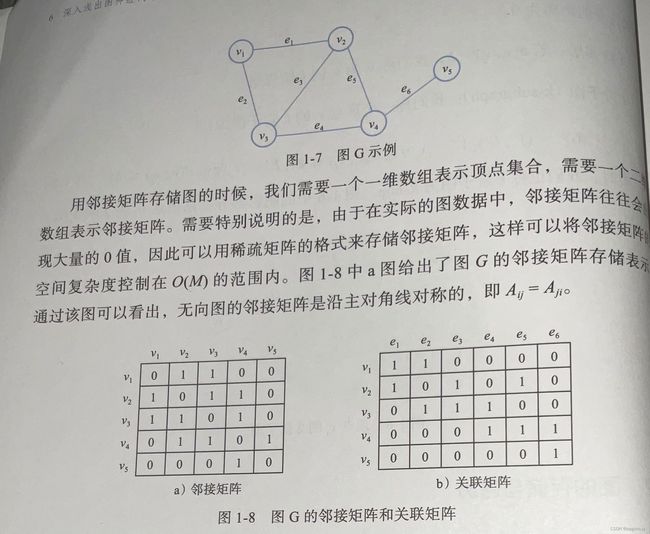
图的遍历:DFS:上述图遍历的顺序12453和BFS:上述图遍历的顺序12345。
1.3 图的应用场景和发展
图也可以叫做网络,顶点和边对应叫做节点和关系。
四类图:
- 同构图:同构图是指图中的节点类型和关系类型仅有一种,如万维网,这类图数据的信息全部包含在邻接矩阵里。
- 异构图:节点类型和关系类型多于一种。图数据对象一般多类型,对象之间的交互也多样化,该类图更贴近现实。
- 属性图:相较于异构图,属性图给图数据增加了额外的属性信息,节点和关系都有标签(节点或关系的类型)和属性(节点或关系的附加描述信息)。
- 非显式图:非显式图是指数据之间没有显式地定义出关系,需要依据某种规则或计算方式将数据的关系表达出来,进而将数据当做一种图数据研究。如3D视觉中的点云数据,将节点之间的距离转化成关系来研究。
发展过程:
2005年,首次提出图神经网络的概念,在此之前,处理方法都是在数据预处理时将图转换为一组向量,这样会损失大量的结构信息。
2009年,监督学习的方法训练GNN,早期都是以迭代的方式,通过循环神经网络传播邻居信息,直到达到稳定的固定状态来学习节点的表示。这种方法计算量太大。
2012年前后,卷积引入GNN,基于频域卷积操作开发了一种图卷积网络模型,但这种方法在计算时要处理整个图,并需要承担矩阵分解时的很高的时间复杂度,难以扩展到大系统网络。
2016年,简化使得图卷积的操作能够在空域进行,提高了效率。
图数据相关任务的一种分类:
- 节点层面的任务:分类任务和回归任务。虽然是对节点预测,但也要考虑节点之间的关系。
- 边层面的任务:分类和预测任务。边的分类是指对边的某种性质进行预测;边的预测是指给定的两个节点之间是否会构成边。
- 图层面的任务:图层面的任务不依赖于某个节点或某条边的属性,而是从图的整体结构出发,实现分类、表示和生成等任务。一般有对药物分子的分类、酶分类等任务。
2.神经网络基础
2.1 机器学习分类:
按是否有标签分类:
监督学习:训练数据中每个样本都有标签,标签可以指导模型进行学习,学到具有判别性的特种证,从可以对未知样本进行预测。
无监督学习:训练数据中完全没有标签,通过算法从数据中发现一些数据之间的约束关系,比如数据之间的关联、距离关系。典型的算法有聚类。
半监督学习:训练数据之中既有有标签数据,也有无标签数据。
按算法输出分类:
分类问题:输出为离散值;
回归问题:输出为连续值。
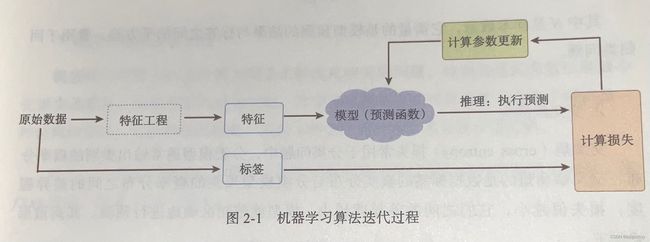
2.2 机器学习流程
- 提取特征:这些特征可以是人为定义的——特征工程,也可以是算法自动提取——深度学习;
- 建立模型:传统的机器学习模型有logistic,随机森林等;基于深度学习的方法有多层感知器、卷积神经网络。模型其实就是一个函数,其目的是建立输入到标签之间的映射。
- 确定损失函数和进行优化求解:选择模型只是确定了一个模型形式,比如使用logistic,它还有一些参数无法确定,因此还无法预测。这个时候就要使用一个数值来量化模型的对错——损失函数,衡量了输出与标签之间的差异程度。
数学模型:模型的输出一般是在每个类别上的概率分布,去概率最大的作为预测结果。
y i ∗ = arg max ( P ( Y ∣ x i ) ) y^*_{i}=\arg \max(P(Y|x_i)) yi∗=argmax(P(Y∣xi))
优化求解:整个过程如下
θ ∗ = arg min [ 1 N ∑ i = 1 N L ( y i , f ( x i ; θ ) ) + λ Φ ( θ ) ] \theta^*=\arg\min[\frac{1}{N}\sum_{i=1}^{N}L(y_i,f(x_i;\theta))+\lambda\Phi(\theta)] θ∗=argmin[N1i=1∑NL(yi,f(xi;θ))+λΦ(θ)]
其实质是调整 f f f的参数 θ \theta θ,使得损失函数值达到最小,此时就是最优的模型。其中前面的均值函数是经验风险函数, L L L代表的是损失函数,后面的 Φ \Phi Φ是正则化项,或者叫惩罚项。
实际优化无法一步优化至最佳,常用迭代法,有如下过程:
如果在训练集取得效果很好,但是在新样本上的效果极差,这种现象称为过拟合;“竭尽全力”无法在训练集上达到很好的效果,称为欠拟合。
2.3 损失函数
平方损失函数:用于预测标签y为实数值的任务中,定义为
L ( y , f ( x ⃗ ; θ ) ) = 1 / 2 ( y − f ( x ⃗ ; θ ) ) 2 L(y,f(\vec x;\theta))=1/2(y-f(\vec x;\theta))^2 L(y,f(x;θ))=1/2(y−f(x;θ))2
其不适用于分类问题。
**交叉熵损失函数:**一般用于分类问题。
离散形式如下:
L ( y , f ( x ) ) = H ( p , q ) = − 1 N ∑ i = 1 N p ( y i ∣ x i ) log [ q ( y ^ i ∣ x i ) ] L(y,f(x))=H(p,q)=-\frac{1}{N}\sum_{i=1}^Np(y_i|x_i)\log[q(\hat y_i|x_i)] L(y,f(x))=H(p,q)=−N1i=1∑Np(yi∣xi)log[q(y^i∣xi)]
其中, p p p代表真实分布, q q q代表预测分布,一般来说样本 x i x_i xi只属于某个类别 c k c_k ck,因此有 p ( y i = c k ∣ x i ) = 1 p(y_i=c_k|x_i)=1 p(yi=ck∣xi)=1,在其它类别上概率p均为0。
综上可以写成如下公式
L ( y , f ( x ) ) = − 1 N ∑ i = 1 N log [ q ( y ^ i = ∣ x i ) ] L(y,f(x))=-\frac{1}{N}\sum_{i=1}^N\log[q(\hat y_i=|x_i)] L(y,f(x))=−N1i=1∑Nlog[q(y^i=∣xi)]
可以看出在这种情况下,最小化交叉熵损失的本质就是最大化样本标签的似然概率。
以二分类问题的logistic回归模型为例,若 y i ∈ { 0 , 1 } y_i\in\{0,1\} yi∈{0,1},使用logistic回归可以得到样本 x i x_i xi属于类别1的概率为 q ( y i = 1 ∣ x i ) q(y_i=1|x_i) q(yi=1∣xi),属于类别0的概率为 q ( y i = 0 ∣ x i ) = 1 − q ( y i = 1 ∣ x i ) q(y_i=0|x_i)=1-q(y_i=1|x_i) q(yi=0∣xi)=1−q(yi=1∣xi),使用上式,可以得到logistic回归的损失函数,
L ( y , f ( x ) ) = − 1 N ∑ i = 1 N [ y i log q ( y i = 1 ∣ x i ) + ( 1 − y i ) log q ( y i = 0 ∣ x i ) ] = − 1 N ∑ i = 1 N [ y i log q ( y i = 1 ∣ x i ) + ( 1 − y i ) log ( 1 − q ( y i = 1 ∣ x i ) ) ] L(y,f(x))=-\frac{1}{N}\sum_{i=1}^{N}[y_i\log q(y_i=1|x_i)+(1-y_i)\log q(y_i=0|x_i)]\\=-\frac{1}{N}\sum_{i=1}^{N}[y_i\log q(y_i=1|x_i)+(1-y_i)\log (1-q(y_i=1|x_i))] L(y,f(x))=−N1i=1∑N[yilogq(yi=1∣xi)+(1−yi)logq(yi=0∣xi)]=−N1i=1∑N[yilogq(yi=1∣xi)+(1−yi)log(1−q(yi=1∣xi))]
2.4 梯度下降算法
2.4.1 梯度下降算法原理
对于一个多元函数,梯度定义为对其中每个自变量的偏导数构成的向量,用 f ′ ( x ) f^{'}(\pmb x) f′(xxx),
f ′ ( x ) = ▽ f ( x ) = [ ▽ f ( x 1 ) , . . . , ▽ f ( x n ) ] T f^{'}(\pmb x)=\triangledown f(\pmb x)=[\triangledown f(\pmb x_1),...,\triangledown f(\pmb x_n)]^T f′(xxx)=▽f(xxx)=[▽f(xxx1),...,▽f(xxxn)]T
考查 f ( x + △ x ) f(\pmb x+\triangle\pmb x) f(xxx+△xxx)在 x \pmb x xxx处的泰勒展开,如式(2.7)所示:
f ( x + △ x ) = f ( x ) + f ′ ( x ) T △ x + o ( △ x ) f(\pmb x+\triangle \pmb x)=f(\pmb x)+f^{'}(\pmb x)^T\triangle \pmb x+o(\triangle \pmb x) f(xxx+△xxx)=f(xxx)+f′(xxx)T△xxx+o(△xxx)
忽略高阶项,要使得 f ( x + △ x ) < f ( x ) f(\pmb x+\triangle \pmb x)
机器学习的目标:最小化损失函数。
算法过程:
- 随机初始化为需要求解的参数赋初值,作为优化起点;
- 使用当前模型进行预测,计算损失值;
- 利用损失值计算梯度,基于梯度更新参数。
- 重复上述过程,直到达到停止条件。
2.4.2 梯度下降算法
全部样本计算损失函数的梯度:
给定训练集 { x n , y n } n = 1 N \{{x_n,y_n}\}_{n=1}^N {xn,yn}n=1N,给定模型 f f f,包含的参数集合为 Θ = { θ ( 0 ) , . . . , θ ( k ) } \Theta=\{\theta^{(0)}, ...,\theta^{(k)} \} Θ={θ(0),...,θ(k)},损失函数为 L ( Y , f ( X ; Θ ) ) L(Y,f(X;\Theta)) L(Y,f(X;Θ)),学习率为 α \alpha α。
随机初始化参数: { θ 0 ( 0 ) , . . . , θ 0 ( k ) } \{\theta_0^{(0)},...,\theta^{(k)}_0\} {θ0(0),...,θ0(k)}
F o r t = 0 , 1 , . . . , T : L t = L ( Y , f ( X ; Θ t ) ) , ▽ Θ t = ∂ L t ∂ Θ t = { ▽ θ t ( 0 ) , . . . , ▽ θ t ( k ) } Θ t + 1 = { θ t ( 0 ) − α ▽ θ t ( 0 ) , . . . , θ t ( k ) − α ▽ θ t ( k ) } For \quad t=0,1,...,T: \\ L_t=L(Y,f(X;\Theta_t)),\\ \triangledown\Theta_t=\frac{\partial L_t}{\partial \Theta_t}=\{\triangledown \theta_t^{(0)},...,\triangledown \theta_t^{(k)} \}\\ \Theta_{t+1}=\{\theta_t^{(0)}-\alpha\triangledown\theta^{(0)}_t,...,\theta_t^{(k)}-\alpha\triangledown\theta_t^{(k)} \} Fort=0,1,...,T:Lt=L(Y,f(X;Θt)),▽Θt=∂Θt∂Lt={▽θt(0),...,▽θt(k)}Θt+1={θt(0)−α▽θt(0),...,θt(k)−α▽θt(k)}
随机梯度下降算法:
由于全部样本在数据规模比较大的时候会十分低效,计算时间和计算复杂度都会增加,因此只使用单一样本来近似估计梯度可以提高效率。
小批量梯度下降算法:
因为随机梯度下降算法收敛速度很慢,因为其存在一定的不确定性,因此改进方法是每次使用多个样本来估计梯度。算法过程如下:
给定训练集 { x n , y n } n = 1 N \{{x_n,y_n}\}_{n=1}^N {xn,yn}n=1N,给定模型 f f f,包含的参数集合为 Θ = { θ ( 0 ) , . . . , θ ( k ) } \Theta=\{\theta^{(0)}, ...,\theta^{(k)} \} Θ={θ(0),...,θ(k)},损失函数为 L ( Y , f ( X ; Θ ) ) L(Y,f(X;\Theta)) L(Y,f(X;Θ)),学习率为 α \alpha α,批处理大小B。
随机初始化参数: { θ 0 ( 0 ) , . . . , θ 0 ( k ) } \{\theta_0^{(0)},...,\theta^{(k)}_0\} {θ0(0),...,θ0(k)}
F o r t = 0 , 1 , . . . , T , 随 机 打 乱 样 本 , 依 次 从 X , Y 中 选 择 B 个 样 本 得 到 X B t , Y B t : L t = L ( Y B t , f ( X B t ; Θ t ) ) , ▽ Θ t = ∂ L t ∂ Θ t = { ▽ θ t ( 0 ) , . . . , ▽ θ t ( k ) } Θ t + 1 = { θ t ( 0 ) − α ▽ θ t ( 0 ) , . . . , θ t ( k ) − α ▽ θ t ( k ) } For \quad t=0,1,...,T,随机打乱样本,依次从X,Y中选择B个样本\\得到X_{B_t},Y_{B_t}: \\ L_t=L(Y_{B_t},f(X_{B_t};\Theta_t)),\\ \triangledown\Theta_t=\frac{\partial L_t}{\partial \Theta_t}=\{\triangledown \theta_t^{(0)},...,\triangledown \theta_t^{(k)} \}\\ \Theta_{t+1}=\{\theta_t^{(0)}-\alpha\triangledown\theta^{(0)}_t,...,\theta_t^{(k)}-\alpha\triangledown\theta_t^{(k)} \} Fort=0,1,...,T,随机打乱样本,依次从X,Y中选择B个样本得到XBt,YBt:Lt=L(YBt,f(XBt;Θt)),▽Θt=∂Θt∂Lt={▽θt(0),...,▽θt(k)}Θt+1={θt(0)−α▽θt(0),...,θt(k)−α▽θt(k)}
2.5 神经网络
2.5.1 神经元
MP神经元模型:
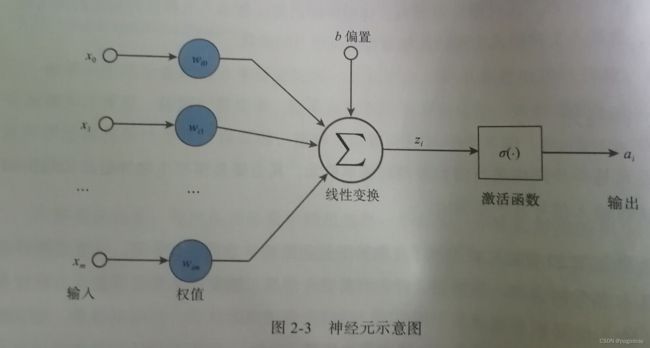
z i = ∑ j = 1 m w i j x j a i = σ ( z i + b ) z_i=\sum_{j=1}^m w_{ij}x_j\\ a_i=\sigma(z_i+b) zi=j=1∑mwijxjai=σ(zi+b)
其中 x i x_i xi是输入信号, w i 0 , w i 1 , w i 2 , . . . , w i m w_{i0},w_{i1},w_{i2},...,w_{im} wi0,wi1,wi2,...,wim是神经元的权值, z i z_i zi是输入信号的线性组合,b是偏置,激活函数是 σ ( ⋅ ) \sigma(\cdot) σ(⋅), a i a_i ai是神经元输出信号。
2.5.2 多层感知器
单隐层感知器典型结构:
f ( x ) = f 2 ( b ( 2 ) + W ( 2 ) ( f 1 ( b ( 1 ) + W ( 1 ) x ) ) ) f(x)=f_2(b^{(2)}+W^{(2)}(f_1(b^{(1)}+W^{(1)}x))) f(x)=f2(b(2)+W(2)(f1(b(1)+W(1)x)))
其中 h ( x ) = f 1 ( b ( 1 ) ) h(x)=f_1(b^{(1)}) h(x)=f1(b(1))是隐藏层的输出。b是偏置,W是权值向量, f f f是激活函数。
前馈神经网络——多层感知器(MLP):隐藏层可以有多层。
注意:后一层的每个神经元与前一层的每个神经元都产生连接。
z ( l ) = W ( l ) ⋅ a ( l − 1 ) + b ( l ) a ( l ) = σ l ( z ( l ) ) z^{(l)}=W^{(l)}\cdot\pmb a^{(l-1)}+\pmb b^{(l)}\\ \pmb a^{(l)}=\sigma_l(z^{(l)}) z(l)=W(l)⋅aaa(l−1)+bbb(l)aaa(l)=σl(z(l))
整个网络可以表示为 φ ( X ; W , b ) \varphi(X;W,\pmb b) φ(X;W,bbb),其中 W , b W,\pmb b W,bbb表示参数的集合 { W ( l ) , b ( l ) ∣ l = 1 , 2 , 3 , . . . } \{W^{(l)},\pmb b^{(l)}|l=1,2,3,...\} {W(l),bbb(l)∣l=1,2,3,...}。
2.5.3 激活函数
2.5.3.1 Sigmoid型函数
Sigmoid函数是指一类S型曲线函数,为两端饱和函数,常用的Sigmoid型函数有Logistic函数和Tanh函数。
所谓饱和,即当x趋近于负无穷时,其导数趋近于0,这时左饱和,右饱和亦是如此。
logistic函数:
σ ( x ) = 1 1 + exp ( − x ) \sigma(x)=\frac{1}{1+\exp(-x)} σ(x)=1+exp(−x)1
Tanh函数:
tanh ( x ) = exp ( x ) − exp ( − x ) exp ( x ) + e x p ( − x ) \text {tanh}(x)=\frac {\exp(x)-\exp(-x)}{\exp(x)+exp(-x)} tanh(x)=exp(x)+exp(−x)exp(x)−exp(−x)
Tanh函数可以看作放大并平移Logistic函数,其值域是(-1,1)。
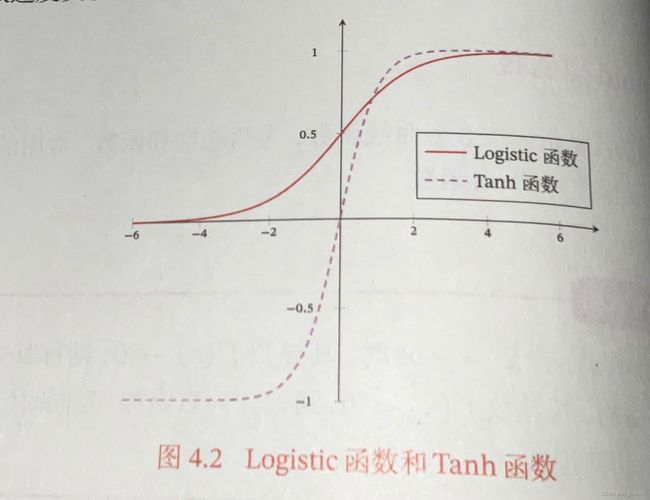
logistic函数是非零中心化的,其输出恒大于0,它会使得其后一层的神经元的输入发生偏置偏移,并进一步使得收敛速度变慢。
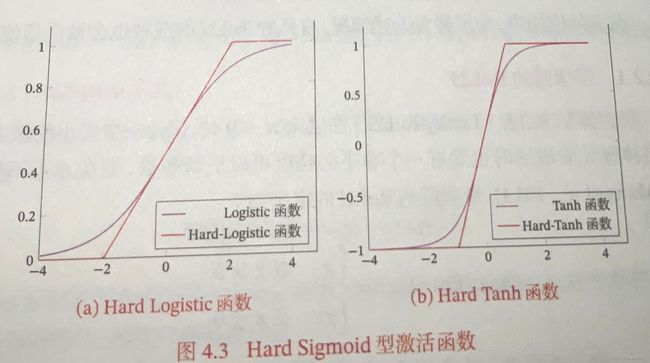
Hard-logistic和Hard-Tanh函数:
将Logistic函数进行泰勒展开有
g l ( x ) ≈ σ ( x ) + x × σ ′ ( x ) g_l(x)\approx\sigma(x)+x\times\sigma^{'}(x) gl(x)≈σ(x)+x×σ′(x)
在x=0处展开可得
g l ( x ) = 0.25 x + 0.5 g_l(x)=0.25x+0.5 gl(x)=0.25x+0.5
hard-logistic函数如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \text{hard-log…
hard-logistic ( x ) = max ( min ( g l ( x ) , 1 ) , 0 ) \text{hard-logistic}(x)=\max(\min(g_l(x),1),0) hard-logistic(x)=max(min(gl(x),1),0)
同理,hard-tanh函数如下:
hard-tanh(x) = max ( min ( g t ( x ) , 1 ) , − 1 ) = max ( min ( x , 1 ) , − 1 ) 其 中 , g t ( x ) = x \text{hard-tanh(x)}=\max(\min(g_t(x),1),-1)\\=\max(\min(x,1),-1)\\ 其中,g_t(x)=x hard-tanh(x)=max(min(gt(x),1),−1)=max(min(x,1),−1)其中,gt(x)=x
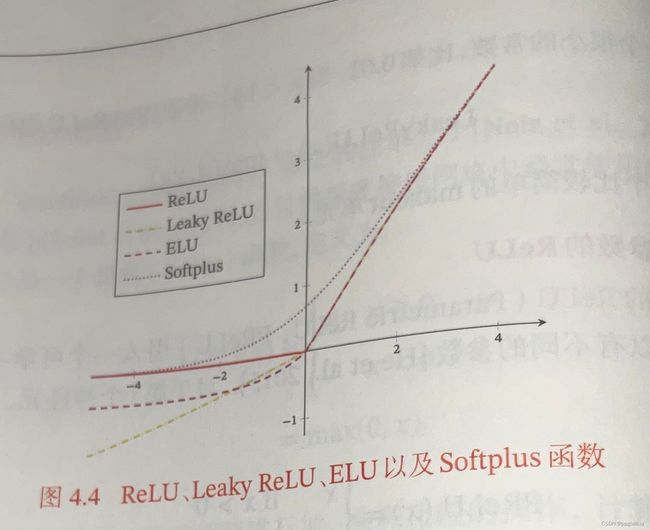
2.5.3.2 ReLU函数
ReLU(修正线性单元),也叫Rectifier函数,是目前深度神经网络中经常使用的激活函数。ReLU实际上是一个斜坡函数,即
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \text{ReLU}(x)…
优点:
- ReLU的神经元只需要进行加、乘和比较的操作,计算ReLU函数也被认为具有生物合理性:单侧抑制,宽兴奋边界。同时人脑同一时刻只有少数神经元兴奋活跃,而Sigmoid型函数会导致一个非稀疏的神经网络,ReLU就具有稀疏性。
- 同时在优化方面,ReLU是左饱和函数,x>0时,导数为1,在一定程度上缓解了神经网络的梯度消失问题。
缺点:
- 非零中心化,后一层神经网络会引入偏置,降低梯度下降的效率;
- 死亡ReLU问题,参数在一次不恰当的更新后,第一个隐藏层中的某个ReLU神经元所有的训练数据上都不能被激活,那么梯度将永远为0。为此,引入几个变种ReLU。
a.带泄露的ReLU
x<0时,保持一个小梯度,使得神经元在非激活状态也能更新参数,定义如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \text {LeakyRe…
其中 γ \gamma γ是一个很小的常数,比如0.01.
b.带参数的ReLU——PReLU
ReLU引入一个可学习的参数,不同神经元可以有不同的参数,对于第i个神经元,其PReLU的定义为
KaTeX parse error: No such environment: equation at position 9: \begin {̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \text{PReLU}_i…
PReLU可以允许不同神经元具有不同的参数,也可以一组神经元共享一个参数。如果 γ \gamma γ为0,退化为ReLU;如果 γ \gamma γ很小,退化为带泄露的ReLU。
2.5.3.3 ELU函数
ELU(指数线性单元)是一个近似的零中心化的非线性函数,其定义为
KaTeX parse error: No such environment: equation at position 9: \begin {̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ ELU(x)= \begin…
γ \gamma γ是一个超参数,决定 x ≤ x\le x≤时的饱和曲线,并调整输出均值在0附近。
2.5.3.4 Softplus函数
RelU的平滑版本,其定义为
Softplus ( x ) = log ( 1 + exp ( x ) ) \text{Softplus}(x)=\log (1+\exp(x)) Softplus(x)=log(1+exp(x))
其导数刚好是Logistic函数,Softplus函数虽然也具有单词抑制,宽兴奋边界的特性,却没有稀疏激活性。
2.5.3.5 Swish函数
Swish函数是一种自门控激活函数,
swish ( x ) = x σ ( β x ) \text {swish}(x)=x\sigma(\beta x) swish(x)=xσ(βx)
其中, σ ( ⋅ ) \sigma(\cdot) σ(⋅)是logistic函数。 β \beta β为可学习的参数或一个固定超参数。 σ ( β x ) \sigma(\beta x) σ(βx)是一个软性的门控机制。当 σ ( β x ) \sigma(\beta x) σ(βx)接近1时,门处于开,激活函数约等于x;当 σ ( β x ) \sigma(\beta x) σ(βx)接近0时,门处于关,激活函数约等于0.
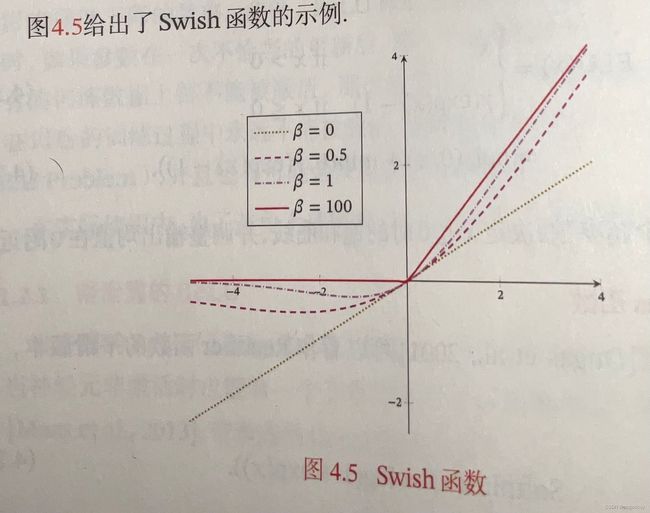
β = 0 \beta=0 β=0的时候,Swish函数变成线性函数 x / 2 x/2 x/2; β = 1 \beta=1 β=1时,Swish函数在 x > 0 x>0 x>0的时候近似线性, x < 0 x<0 x<0的时候近似饱和,同时具有一定非单调性; β = 100 \beta=100 β=100时,近似为ReLU函数。因此Swish函数可以看作线性函数和ReLU函数之间的非线性插值函数,其程度由参数 β \beta β控制。
2.5.3.6 GELU函数(高斯误差线性单元)
是一种通过门控机制来调整其输出值的激活函数,和Swish函数比较类似。
GELU ( x ) = x P ( X ≤ x ) \text{GELU}(x)=xP(X\le x) GELU(x)=xP(X≤x)
其中 P ( X ≤ x ) P(X\le x) P(X≤x)是高斯分布 N ( μ , σ 2 ) N(\mu,\sigma^2) N(μ,σ2)的累积分布函数,其中 μ , σ \mu,\sigma μ,σ为超参数,一般分别设置为0,1。由于高斯分布的累积分布函数是S型函数,因此GELU函数可以用Tanh函数或Logistic函数来近似,
GELU ( x ) ≈ 0.5 x ( 1 + tanh ( 2 π ( x + 0.044715 x 3 ) ) ) o r ≈ x σ ( 1.702 x ) \text{GELU}(x)\approx0.5x(1+\text{tanh}(\sqrt\frac{2}{\pi}(x+0.044715x^3))) \\ or\quad \approx x\sigma(1.702x) GELU(x)≈0.5x(1+tanh(π2(x+0.044715x3)))or≈xσ(1.702x)
使用logistic函数近似时,GELU相当于一种特殊的Swish函数。
2.5.3.7 Maxout单元
Maxout单元也是一种分段线性函数,前面的净输入都是标量,而Maxout单元的输入是上一层神经元的全部原始输出,是一个向量。
每个Maxout有K个权重向量 w k ∈ R D \pmb w_k\in\mathbb R^D wwwk∈RD和偏置 b k b_k bk.对于输入 x \pmb x xxx,可以有K个净输入 z k z_k zk.
z k = w k T x + b k z_k=\pmb w_k^T\pmb x+b_k zk=wwwkTxxx+bk
其中, w k = [ w k , 1 , . . . , w k , D ] T \pmb w_k=[w_{k,1},...,w_{k,D}]^T wwwk=[wk,1,...,wk,D]T为第k个权重向量。
Maxout单元的非线性函数定义为
maxout ( x ) = max k ∈ [ 1 , K ] ( z k ) \text{maxout}(\pmb x)=\max_{k\in[1,K]}(z_k) maxout(xxx)=k∈[1,K]max(zk)
Maxout单元不仅是净输入到输出之间的非线性映射,而是整体学习输入到输出之间的非线性映射关系。Maxout激活函数可以看做任意凸函数的分段线性近似,并且在有限的点上是不可微的。
2.5.4 训练神经网络
核心算法:反向传播算法
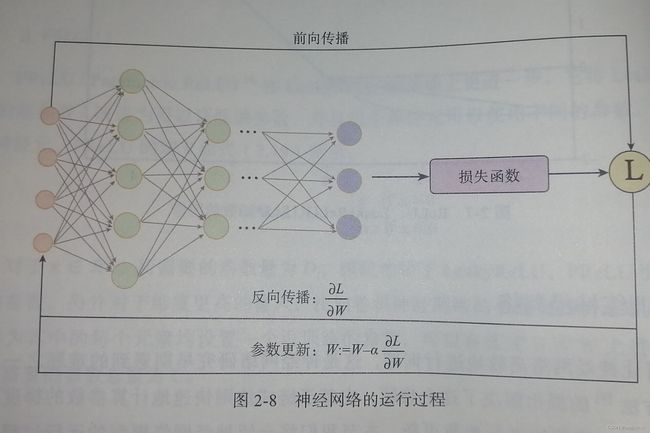
2.5.4.1 神经网络的运行过程
- 前向传播:给定输入和参数,逐层向前进行计算,最后输出预测结果;
- 反向传播:基于前向传播的预测结果,计算损失函数的值,然后计算相关参数的梯度。
- 参数更新:使用梯度下降算法对参数进行更新,重复上述过程,逐步迭代到模型收敛。
2.5.4.2 反向传播
第 l l l层的梯度计算如下,需要使用链式法则:
KaTeX parse error: Undefined control sequence: \part at position 8: \frac{\̲p̲a̲r̲t̲ ̲L(y,\hat y)}{\p…
定义KaTeX parse error: Undefined control sequence: \part at position 21: …a^{(l)}=\frac {\̲p̲a̲r̲t̲ ̲L(y,\hat y)}{\p…为误差项,它衡量的是 z ( l ) z^{(l)} z(l)对损失值的影响,进一步使用链式法则,可得到如下
KaTeX parse error: Undefined control sequence: \part at position 21: …ta^{(l)}=\frac{\̲p̲a̲r̲t̲ ̲L(y,\hat y)}{\p…
基于 z ( l + 1 ) = W ( l + 1 ) a ( l ) + b ( l + 1 ) 且 a ( l ) = σ ( z ( l ) ) z^{(l+1)}=W^{(l+1)}\pmb a^{(l)}+\pmb b^{(l+1)}且\pmb a^{(l)}=\sigma(z^{(l)}) z(l+1)=W(l+1)aaa(l)+bbb(l+1)且aaa(l)=σ(z(l))可以得到
KaTeX parse error: Undefined control sequence: \part at position 21: …ta^{(l)}=\frac{\̲p̲a̲r̲t̲ ̲L(y,\hat y)}{\p…
其中, ⨀ \bigodot ⨀表示哈达玛积,可以看出第l层的误差与第l+1层的误差有关。
那么对于KaTeX parse error: Undefined control sequence: \part at position 8: \frac {\̲p̲a̲r̲t̲ ̲L(y,\hat y)}{\p…有,
KaTeX parse error: Undefined control sequence: \part at position 9: \frac {\̲p̲a̲r̲t̲ ̲L(y,\hat y)}{\p…
2.5.5 优化困境
梯度消失:
由于一般激活函数的导数 σ ′ ( x ) < 1 \sigma^{'}(x)<1 σ′(x)<1,例如sigmoid的导数最大值为0.25,当层数叠加时,多层的反向传播(连乘)会使得梯度值不断减小,接近输入层的梯度值非常小,参数几乎无法更新,在下一次前向传播时,就无法对后面的层产生较大的影响,模型难以有效训练。
因此现在的神经网络常用ReLU激活函数。
局部最优和鞍点:
损失函数通常是凸的,但是损失函数和参数之间的关系非凸。深度神经模型有很多局部最优点,当陷入局部最优的情况时,优化就会变得很困难,但是通常,这些局部最优点也能保证模型的效果。
另一个问题是由于维度过高,深度神经网络模型存在很多鞍点(在该处梯度为0),但它并不是最小值或者最大值,通常鞍点带来的挑战要比局部最优大很多。因为处于鞍点区域的时候,如果误差较大,由于这部分相对平坦,梯度值较小,模型收敛速度将受到极大影响,给人一种局部最优的假象。
,\hat y)}{\part z{(l)}}\=\delta{(l)}
$$
2.5.5 优化困境
梯度消失:
由于一般激活函数的导数 σ ′ ( x ) < 1 \sigma^{'}(x)<1 σ′(x)<1,例如sigmoid的导数最大值为0.25,当层数叠加时,多层的反向传播(连乘)会使得梯度值不断减小,接近输入层的梯度值非常小,参数几乎无法更新,在下一次前向传播时,就无法对后面的层产生较大的影响,模型难以有效训练。
因此现在的神经网络常用ReLU激活函数。
局部最优和鞍点:
损失函数通常是凸的,但是损失函数和参数之间的关系非凸。深度神经模型有很多局部最优点,当陷入局部最优的情况时,优化就会变得很困难,但是通常,这些局部最优点也能保证模型的效果。
另一个问题是由于维度过高,深度神经网络模型存在很多鞍点(在该处梯度为0),但它并不是最小值或者最大值,通常鞍点带来的挑战要比局部最优大很多。因为处于鞍点区域的时候,如果误差较大,由于这部分相对平坦,梯度值较小,模型收敛速度将受到极大影响,给人一种局部最优的假象。