ORB-SLAM2源码阅读(一)-----ORB特征提取
前言
1.构建图像金字塔
2. 特征点数量的分配计算
2.1如何分配每一层提取的特征点数量。
2.2什么是FAST角点,如何提取?
3. Oriented FAST,旋转角度计算
4. 计算Rotation-Aware BRIEF, rBRIEF
4.1 BRIEF描述子
4.2 Steered BRIEF
5. 使用四叉树均匀分布特征点---ORB-SLAM对ORB特征的改进
前言
ORB-SLAM的一大创新点在于系统的所有模块都使用了同一种特征:ORB,这样构造的系统更加简单、稳健。
本文首先介绍了原版的ORB特征,之后又介绍了ORB-SLAM对ORB特征的改进。
1.一定的尺度不变性:利用图像金子塔实现,由于金字塔层数有限,因此只能在一定范围保证尺度的不变性。
2.旋转不变性:首先利用灰度质心法计算出特征的方向,然后计算旋转后的BRIEF描述子。
3.抗噪能力:计算BRIEF的时候不是使用一个点的灰度,而是使用了点周围5×5区域的灰度。
4.应该也有一定的光照不变性:因为FAST提取的时候是比较灰度,rBRIEF的计算也是比较灰度。
5.速度快:使用了FAST角点,BRIEF描述子,二者均很快。速度是SIFT的100倍,SURF的10倍。
鉴于对小白友好型,这里给一些理论基础,这些看懂之后再看就非常容易:
全网最详细SIFT算法原理实现
Sift中尺度空间、高斯金字塔、差分金字塔(DOG金字塔)、图像金字塔
1.构建图像金字塔
图像金字塔对应函数为:void ORBextractor::ComputePyramid(cv::Mat image)
int nfeatures; ///<整个图像金字塔中,要提取的特征点数目
double scaleFactor; ///<图像金字塔层与层之间的缩放因子
int nlevels; ///<图像金字塔的层数对一张图像进行连续的等比缩放(一般是缩小),把多次缩放之后的图像加上原图,我们统称为图像金字塔,注意这里使用的是图像金字塔,并非高斯金字塔(应用在SIFT中)。
目的:在获取目标图像后计算图像金字塔(nlevels张不同分辨率的图片),为FAST关键点在各层上的计算提供支持。
实质:在不同的尺度空间上查找关键点,并计算出关键点的方向。
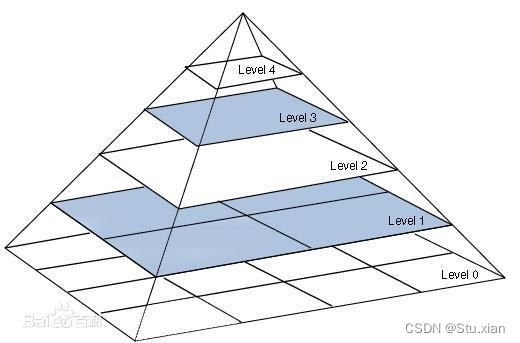
其上的 Level 0 表示原图, Level 1 则为 按照缩放因子 f 进行第一次缩放的结果,Level 2 则是在 Level 1 的基础上,按照放因子 f 再次进行缩放之后的结果。这样一次循环叠加,形成了上面的图像金字塔。使用图像金字塔,我们可以提取到图像各个尺寸的关键点,这样增加了算法的鲁棒性。
2. 特征点数量的分配计算
2.1如何分配每一层提取的特征点数量。
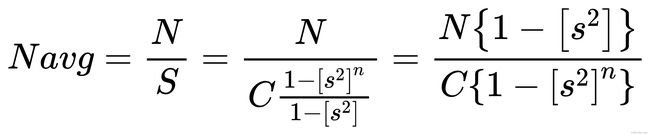
金字塔层数越高,图像的面积越小,所能提取到的特征数量就越小。基于这个原理,我们可以按照面积将特征点均摊到金字塔每层的图像上。我们假设第0层图像的宽为 ,长为 ,缩放因子为 (这里的 )。那么整个金字塔总的面积为

那么,单位面积的特征点数量为
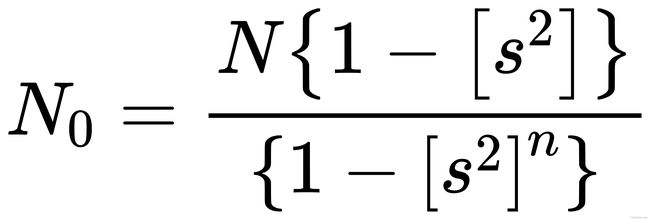
那么,第0层应分配的特征点数量为
接着那么,推出了第 α 层应分配的特征点数量为

实际上,OpenCV里的代码不是按照面积算的,而是按照边长来算的。也就是上面公式中的 [s2] 换成 s 。
[ORB-SLAM2] ORB-SLAM中的ORB特征(提取) - 知乎
2.2什么是FAST角点,如何提取?
FAST角点,通过对比中心与周围点(半径为3的圆上的点)灰度的差别,即可确定是否为关键点,速度贼快


至于FAST算法的原理这里不过多的赘述可以参考:Features From Accelerated Segment Test
按照上述步骤对图像上每个像素处理一遍,可以获取大量的FAST角点。那,FAST角点容易出现扎堆现象,要用非极大值抑制再处理一遍(Non-maximal suppression)。TODO: NMS具体实施。非极大值抑制的方法使用的分数计算很简单,计算一个中心点与周围16个点灰度差绝对值的和最为分数:

为了选择响应最大的个角点,还需要计算一个Harris响应。最后,在每层中选择响应最大的 个特征点。TODO: Harris角点的计算。
3. Oriented FAST,旋转角度计算
原始的FAST关键点没有方向信息,当图像发生旋转后,brief描述子也会发生变化使得特征点对旋转不鲁棒。
解决办法:使用灰度质心法计算特征点的方向。(Oriented FAST)
灰度质心法:


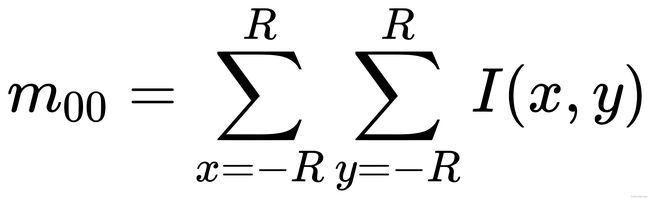
圆形区域内所有像素的灰度值总和为:
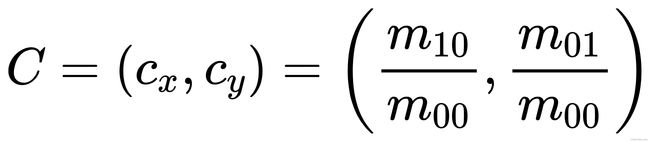
图像的质心为:

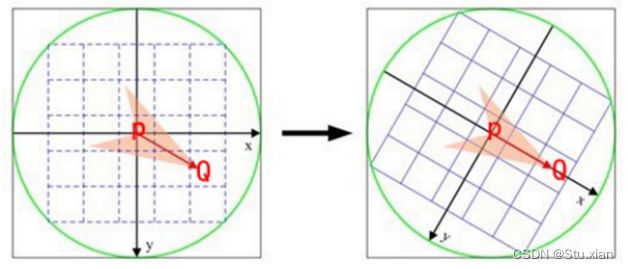
下图P为几何中心,Q为灰度质心
ORB-SLAM2中的函数:
* @brief 这个函数用于计算特征点的方向,这里是返回角度作为方向。
* 计算特征点方向是为了使得提取的特征点具有旋转不变性。
* 方法是灰度质心法:以几何中心和灰度质心的连线作为该特征点方向
* @param[in] image 要进行操作的某层金字塔图像
* @param[in] pt 当前特征点的坐标
* @param[in] u_max 图像块的每一行的坐标边界 u_max
* @return float 返回特征点的角度,范围为[0,360)角度,精度为0.3°
static float IC_Angle(const Mat& image, Point2f pt, const vector & u_max) 4. 计算Rotation-Aware BRIEF, rBRIEF
上述过程,只是找到关键点并确定了其方向,但ORB算法核心用途在于图像的匹配,我们需要对关键点进行数学层面的特征描述,也就是构建关键点描述符.
4.1 BRIEF描述子
- 以特征点为中心,取其大小为SxS的邻域p(S的大小paper中并为提及,也未讨论S的大小对结果的影响,但是通过原作者之后做的实验中发现,原作者使用的S大小为31)。
- 在这个区域p中选取nd个点对nd(x,y),定义τ:

3.p(x)为x点的像素值大小。也就是比较x,y点的像素值,如果y点像素值大则为1,否则为0。 (nd=128,256和512)
将nd个结果从最低位到最高位依次组成字符串fnd( p),

这样把256个点对的结果排起来,就形成了BRIEF描述子。
BRIEF的匹配采用汉明距离,非常快,简单说就是看一下不相同的位数有多少个。如下的两个描述子,不同的位数为4。实际上我们选择的点对数为256,那么距离范围就是0~256。
4.2 Steered BRIEF
BRIEF描述子是没有考虑旋转不变性的,Steered BRIEF根据Oriented FAST计算出的角度,把原始的256个点对的坐标旋转之后,再取灰度。从而实现了旋转不变性。
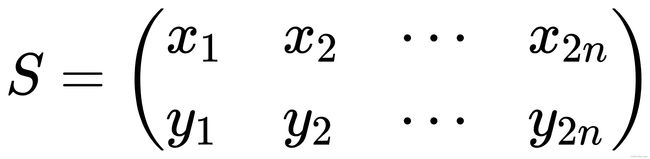
对于任何一个特征点来说,它的BRIEF描述子是一个长度为nn的二值码串,这个二值串是由特征点周围nn个点对(2n2n个点)生成的,现在我们将这2n2n个点(xi,yi),i=1,2,⋯,2n(xi,yi),i=1,2,⋯,2n组成一个矩阵S
ORB中采用了一个更有效的方法:使用邻域方向θθ和对应的旋转矩阵RθRθ,构建SS的一个校正版本Sθ
原始的256个点对坐标为 S ,旋转后的为 Sθ 。
这里可以参考:Oriented FAST and Rotated BRIEF-特征点的描述
5. 使用四叉树均匀分布特征点---ORB-SLAM对ORB特征的改进
ORB-SLAM中并没有使用OpenCV的实现,因为OpenCV的版本提取的ORB特征过于集中,会出现扎堆的现象。这会降低SLAM的精度,对于闭环来说,也会降低一幅图像上的信息量。
具体参考:ORB特征提取策略对ORB-SLAM2性能的影响
ORB-SLAM中的实现提高了特征分布的均匀性。
最简单的一种方法是把图像划分成若干小格子,每个小格子里面保留质量最好的n个特征点。这种方法看似不错,实际上会有一些问题。当有些格子里面能够提取的数量不足n个的时候(无纹理区域),整幅图上提取的特征总量就达不到我们想要的数量。严重的情况下,SLAM就会跟丢喽,ORB-SLAM中的实现就解决了这么一个问题,当一个格子提取不到FAST点的时候,自动降低阈值。ORB-SLAM主要改进了FAST角点提取步骤。
对应函数 DistributeOctTree
* @brief 使用四叉树法对一个图像金字塔图层中的特征点进行平均和分发
* @param[in] vToDistributeKeys 等待进行分配到四叉树中的特征点
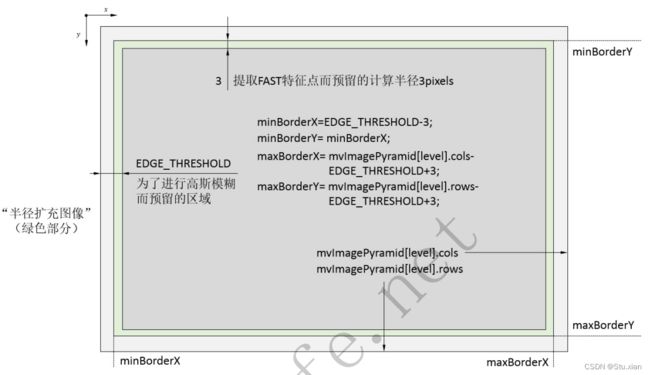
* @param[in] minX 当前图层的图像的边界,坐标都是在“半径扩充图像”坐标系下的坐标
* @param[in] maxX
* @param[in] minY
* @param[in] maxY
* @param[in] N 希望提取出的特征点个数
* @param[in] level 指定的金字塔图层,并未使用
* @return vector 已经均匀分散好的特征点vector容器
*/
vector ORBextractor::DistributeOctTree(const vector& vToDistributeKeys, const int &minX,
const int &maxX, const int &minY, const int &maxY, const int &N, const int &level) - 对于金字塔的每一层。划分格子,格子的大小为30×30pixels
- 单独对每个格子提取FAST角点,如果提取不到点,就降低FAST阈值。这样保证纹理较弱的区域也能提取到一些FAST角点。这一步可以提取大量的FAST点。
- 基于四叉树,均匀的选取 Na 个FAST点。
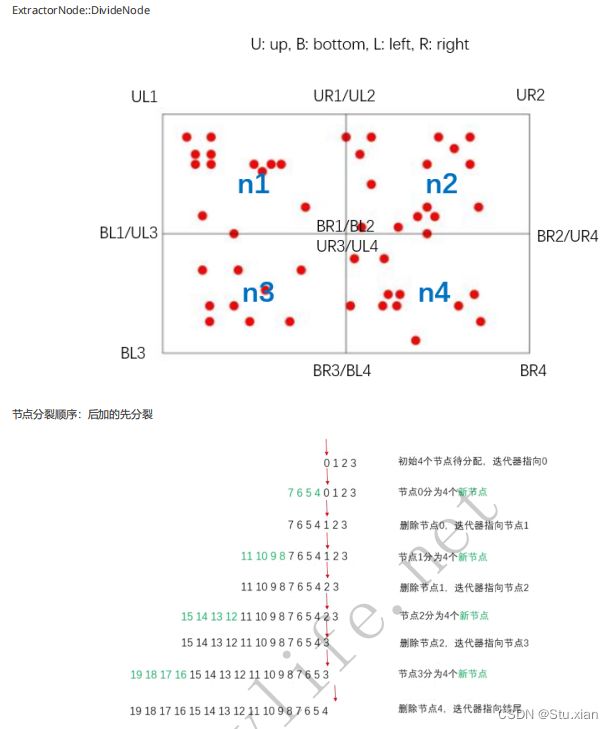
- 如果图片的宽度比较宽,就先把分成左右w/h份。一般的640×480的图像开始的时候只有一个node。
- 如果node里面的点数>1,把每个node分成四个node,如果node里面的特征点为空,就不要了,删掉。
- 新分的node的点数>1,就再分裂成4个node。如此,一直分裂。
- 终止条件为:node的总数量> Na ,或者无法再进行分裂。
- 然后从每个node里面选择一个质量最好的FAST点。
图示表示的更清晰一些:

然后:
本文章只做学术共享,无其他目的。主要参考这位大佬的内容。
参考:[ORB-SLAM2] ORB-SLAM中的ORB特征(提取)