卷积神经网络
Datawhale开源学习,机器学习课程,项目地址:https://github.com/datawhalechina/leeml-notes
Convolutional Neural Network
本节内容学习了什么是CNN卷积神经网络,相比于全连接网络,它每次只提取部分内容作为整个网络的某些模块的运算,每个卷积可能负责图像上某个小模块的内容,比如某个卷积filter输出后得到的可能是某个该卷积想关注的图像纹理特征,我们一般是将多个卷积最终通过全连接,让局部信息和全局信息相互作用,通过全连接最终利用起整体的信息,所以也会说明卷积神经网络和全连接神经网络之间的关系,以及卷积神经网络的一些应用,比如卷积神经网络可以用于文本情感分析、语音辨识、迁移学习等等涉及图像的操作上。
接下来我会放出经过自己整理的李宏毅老师的讲课笔记。
Notes
我们可以用一般的neural network来做影像处理,不一定要用CNN,比如说你想要做图像的分类,那你就去train一个neural network,它的input是一张图片,你就用里面的pixel来表示这张图片,也就是一个很长很长的vector,而output则是由图像类别组成的vector,假设你有1000个类别,那output就有1000个dimension。但是,我们现在会遇到的问题是这样子:实际上,在train neural network时,我们会有一种期待说,在这个network structure里面的每一个neuron,都应该代表了一个最基本的classifier;事实上,在文献上,根据训练的结果,也有很多人得到这样的结论,举例来说,下图中:
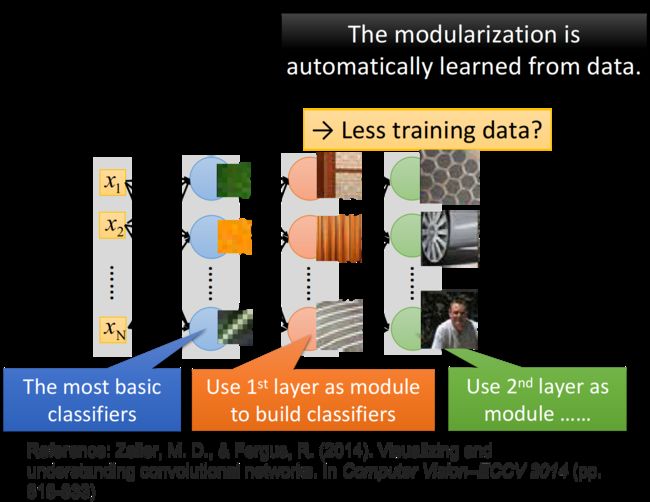
- 第一个layer的neuron,它就是最简单的classifier,它做的事情就是detect有没有绿色出现、有没有黄色出现、有没有斜的条纹出现等等
- 那第二个layer,它做的事情是detect更复杂的东西,根据第一个layer的output,它如果看到直线横线,就是窗框的一部分;如果看到棕色的直条纹就是木纹;看到斜条纹加灰色的,这个有可能是很多东西,比如说,轮胎的一部分等等
- 再根据第二个hidden layer的output,第三个hidden layer会做更复杂的事情,比如它可以知道说,当某一个neuron看到蜂巢,它就会被activate;当某一个neuron看到车子,它就会被activate;当某一个neuron看到人的上半身,它就会被activate等等
那现在的问题是:当我们直接用一般的fully connected的feedforward network来做图像处理的时候,往往会需要太多的参数。因此引入卷积神经网络CNN。
举例来说,假设这是一张 100 × 100 100\times100 100×100的彩色图片,它的分辨率才 100 × 100 100\times100 100×100,那这已经是很小张的image了,然后你需要把它拉成一个vector,总共有 100 × 100 × 3 100\times100\times3 100×100×3个pixel(如果是彩色的图的话,每个pixel其实需要3个value,即RGB值来描述它的),把这些加起来input vector就已经有三万维了;如果input vector是三万维,又假设hidden layer有1000个neuron,那仅仅是第一层hidden layer的参数就已经有 30000 × 1000 30000\times1000 30000×1000个了,这样就太多了。所以,CNN做的事情其实是,来简化这个neural network的架构,我们根据自己的知识和对图像处理的理解,一开始就把某些实际上用不到的参数给过滤掉。我们一开始就想一些办法,不要用fully connected network,而是用比较少的参数,来做图像处理这件事情,所以CNN其实是比一般的DNN还要更简单的。
以上内容说的意思就是,卷积网络只需要提取图像中「一部分」有用的信息,而不需要像全连接那样利用所有的信息,一方面是突出有用信息,过滤掉不切实际或对最终结果几乎没有帮助的信息;另一方面也考虑到硬件层面,CNN运算量相对较低。
接下来我去进一步说明,为什么通过卷积只提取图像的「一部分」信息就可以呢?拿掉这一部分数据为何还可以处理图像?李宏毅做了三点说明:
- Some patterns are much smaller than the whole image(有些图像只需要关注图像的一部分区域内容即可)
- The same patterns appear in different regions(同样的内容可能出现在不同图片的不同位置,CNN可以屏蔽位置对图像信息的影响)
- Subsampling the pixels will not change the object(采用一些下采样方法后对图像的整体信息不会有太多损失)
接下来就是对上面问题「为什么拿掉一部分数据还可以处理图像」的进行解答和说明。
Why CNN for Image?
为什么我们有可能把一些参数拿掉?为什么我们有可能只用比较少的参数就可以来做图像处理这件事情?下面列出三个对影像处理的观察,这也是CNN架构提出的基础所在。
1. Some patterns are much smaller than the whole image
在影像处理里面,如果在network的第一层hidden layer里,那些neuron要做的事情是侦测有没有一种东西、一种pattern(图案样式)出现,那大部分的pattern其实是比整张image要小的,所以对一个neuron来说,想要侦测有没有某一个pattern出现,它其实并不需要看整张image,只需要看这张image的一小部分,就可以决定这件事情了。
举例来说,假设现在我们有一张鸟的图片,那第一层hidden layer的某一个neuron的工作是,检测有没有鸟嘴的存在(你可能还有一些neuron侦测有没有鸟嘴的存在、有一些neuron侦测有没有爪子的存在、有一些neuron侦测有没有翅膀的存在、有没有尾巴的存在,之后合起来,就可以侦测,图片中有没有一只鸟),那它其实并不需要看整张图,因为,其实我们只要给neuron看个小的区域,它其实就可以知道说,这是不是一个鸟嘴,对人来说也是一样,只要看这个小的区域你就会知道说这是鸟嘴,所以,每一个neuron其实只要连接到一个小块的区域就好,它不需要连接到整张完整的图,因此也对应着更少的参数

2. The same patterns appear in different regions
同样的pattern,可能会出现在image的不同部分,但是它们有同样的形状、代表的是同样的含义,因此它们也可以用同样的neuron、同样的参数,被同一个detector检测出来
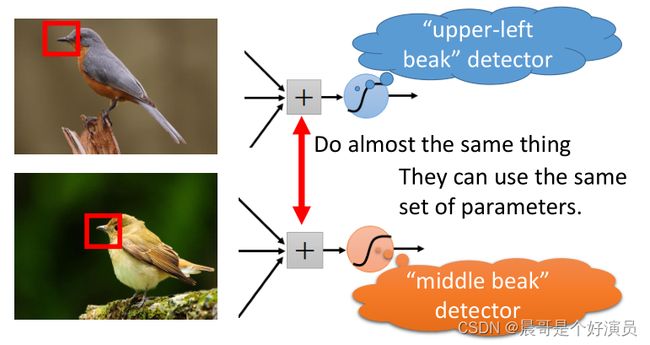
举例来说,图中分别有一个处于左上角的鸟嘴和一个处于中央的鸟嘴,但你并不需要训练两个不同的detector去专门侦测左上角有没有鸟嘴和中央有没有鸟嘴这两件事情,这样做太冗余了,我们要cost down(降低成本),我们并不需要有两个neuron、两组不同的参数来做duplicate的事情,所以我们可以要求这些功能几乎一致的neuron共用一组参数,它们share同一组参数就可以帮助减少总参数的量
3. Subsampling the pixels will not change the object
我们可以对一张image做subsampling,假如你把它奇数行、偶数列的pixel拿掉,image就可以变成原来的十分之一大小,而且并不会影响人对这张image的理解,对你来说,下面两张大小不一的image看起来不会有什么太大的区别,你都可以识别里面有什么物件,因此subsampling对图像辨识来说,可能是没有太大的影响的
所以,我们可以利用subsampling这个概念把image变小,从而减少需要用到的参数量
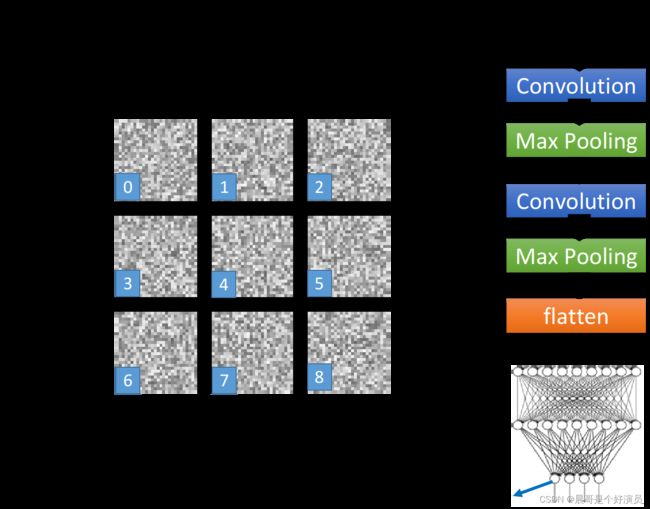
The whole CNN structure
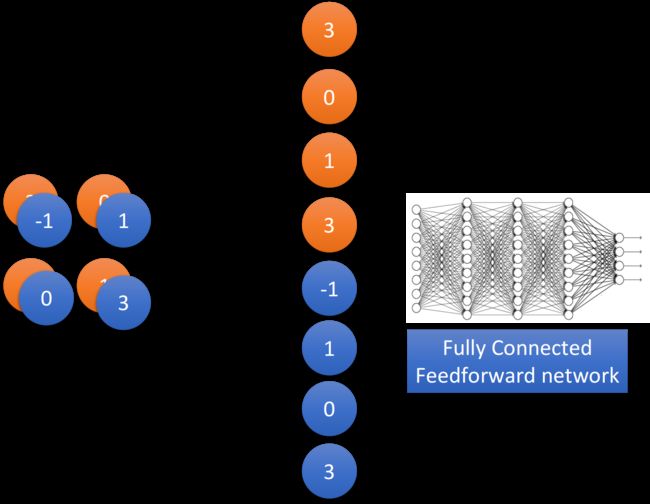
整个CNN的架构是这样的:首先,input一张image以后,它会先通过Convolution的layer,接下来做Max Pooling这件事,然后再去做Convolution,再做Max Pooling。这个process可以反复进行多次(重复次数需要事先决定),这就是network的架构,就好像network有几层一样,你要做几次convolution,做几次Max Pooling,在定这个network的架构时就要事先决定好。当你做完先前决定的convolution和max pooling的次数后,你要做的事情是Flatten,做完flatten以后,你就把Flatten output丢到一般的Fully connected network里面去,最终得到影像辨识的结果:
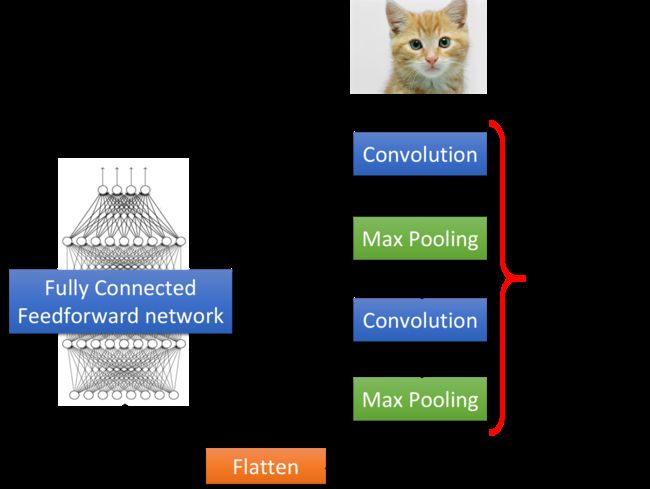
我们基于之前提到的三个对影像处理的观察,设计了CNN这样的架构,第一个是要侦测一个pattern,你不需要看整张image,只要看image的一个小部分;第二个是同样的pattern会出现在一张图片的不同区域;第三个是我们可以对整张image做subsampling。前面两个property,是用convolution的layer来处理的;最后这个property,是用max pooling来处理的。
以上实际上是说卷积适用于图像处理,同时说了卷积和最大池化max pooling是以何种形式存放于整个网络中的,又是怎样和全连接联系到一起的。
Convolution卷积
假设现在我们network的input是一张6 × 6 \times6 ×6的image,图像是黑白的,因此每个pixel只需要用一个value来表示,而在convolution layer里面,有一堆Filter,这边的每一个Filter,其实就等同于是Fully connected layer里的一个neuron。
Property 1
每一个Filter其实就是一个matrix,这个matrix里面每一个element的值,就跟那些neuron的weight和bias一样,是network的parameter,它们具体的值都是通过Training data学出来的,而不是人去设计的。所以,每个Filter里面的值是什么,要做什么事情,都是自动学习出来的,图中每一个filter是 3 × 3 3\times3 3×3的size,意味着它就是在侦测一个 3 × 3 3\times3 3×3的pattern,当它侦测的时候,并不会去看整张image,它只看一个 3 × 3 3\times3 3×3范围内的pixel,就可以判断某一个pattern有没有出现,这就考虑了property 1
Property 2
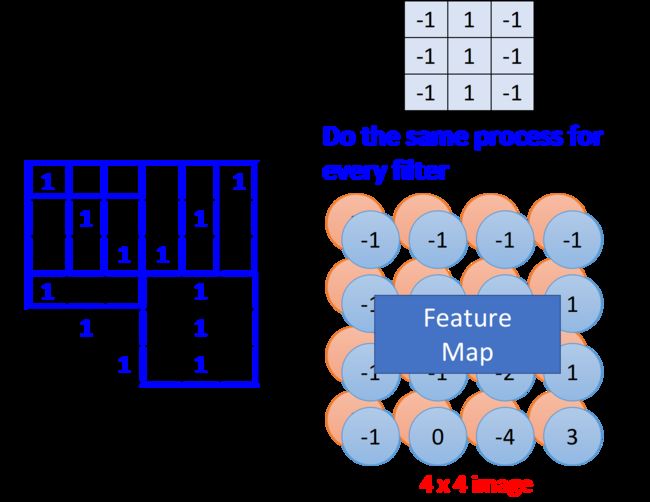
这个filter是从image的左上角开始,做一个slide window,每次向右挪动一定的距离,这个距离就叫做stride(步长),由自己设定,每次filter停下时就跟image中对应的 3 × 3 3\times3 3×3的matrix做一个内积(相同位置的值相乘并累计求和),这里假设stride=1,那么我们的filter每次移动一格,当它碰到image最右边的时候,就从下一行的最左边开始重复进行上述操作,经过一整个convolution的process,最终得到下图所示的红色的 4 × 4 4\times4 4×4 matrix。
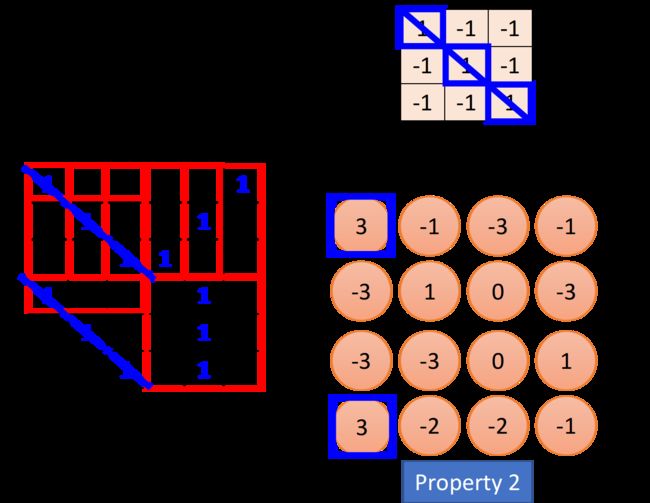
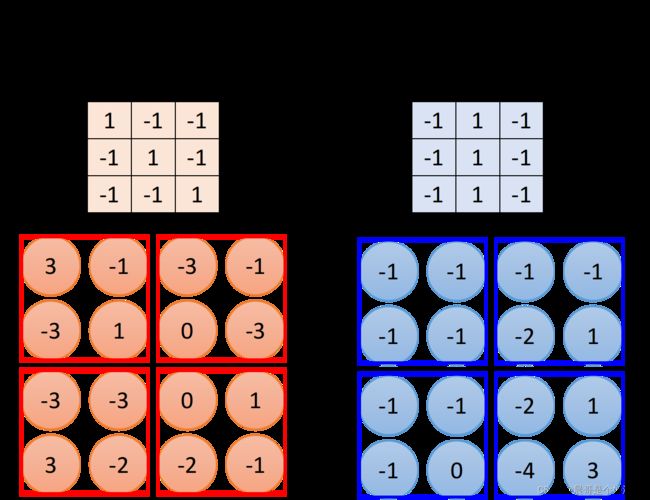
观察上图中的Filter 1,它斜对角的地方是1,1,1,所以它的工作就是detect有没有连续的从左上角到右下角的1,1,1出现在这个image里面,检测到的结果已在上图中用蓝线标识出来,此时filter得到的卷积结果的左上和左下得到了最大的值,这就代表说,该filter所要侦测的pattern出现在image的左上角和左下角。同一个pattern出现在image左上角的位置和左下角的位置,并不需要用到不同的filter,我们用filter 1就可以侦测出来,这就考虑了property 2。
Feature Map
在一个convolution的layer里面,它会有一打filter,不一样的filter会有不一样的参数,但是这些filter做卷积的过程都是一模一样的,你把filter 2跟image做完convolution以后,你就会得到另外一个蓝色的 4 × 4 4\times4 4×4 matrix,那这个蓝色的 4 × 4 4\times4 4×4 matrix跟之前红色的 4 × 4 4\times4 4×4matrix合起来,他们就叫做Feature Map,有多少个filter,对应就有多少个映射后的image,filter的数量等于feature map的数量。
CNN对不同scale的相同pattern的处理上存在一定的困难,由于现在每一个filter size都是一样的,这意味着,如果你今天有同一个pattern,它有不同的size,有大的鸟嘴,也有小的鸟嘴,CNN并不能够自动处理这个问题;
DeepMind曾经发过一篇paper,提到了当你input一张image时,它在CNN前面再接另外一个network,这个network做的事情是,它会output一些scalar,告诉你它要把这个image的里面的哪些位置做旋转、缩放,然后,再丢到CNN里面,这样你其实会得到比较好的performance。
Colorful image
刚才举的例子是黑白的image,所以你input的是一个matrix,如果今天是彩色的image会怎么样呢?我们知道彩色的image就是由RGB组成的,所以一个彩色的image,它就是好几个matrix叠在一起,是一个立方体,如果我今天要处理彩色的image,要怎么做呢?
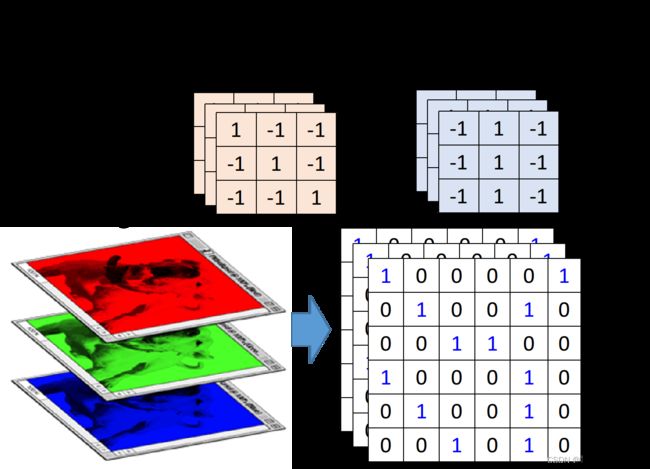
这个时候你的filter就不再是一个matrix了,它也会是一个立方体,如果你今天是RGB这三个颜色来表示一个pixel的话,那你的input就是 3 × 6 × × 6 3\times6\times\times6 3×6××6,你的filter就是 3 × 3 × 3 3\times3\times3 3×3×3,你的filter的高就是3,在做convolution的话,就是将filter的9个值和image的9个值做内积,不是把每一个channel分开来算,而是合在一起来算,一个filter就考虑了不同颜色所代表的channel,具体操作为做内积,并且三层的结果相加,得到一个scalar,因此一个filter可以得到一个feature map,并且层数只能为1层。图中的这种情况,输出的feature map有2个channel,分别是filter 1和filter 2与原图卷积得到的矩阵。
以上内容说明了如何在单通道黑白图像和三通道RGB图像上进行卷积运算,强调了什么是filter,什么是Channel等等易混淆概念。
Convolution v.s. Fully connected
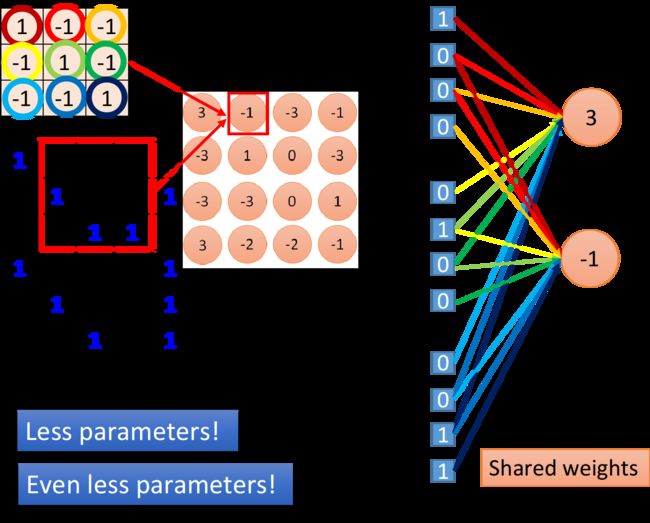
接下来要讲的是,convolution跟fully connected有什么关系,你可能觉得它是一个很特别的operation,感觉跟neural network没半毛钱关系,其实它就是一个neural network。卷积其实就是fully connected的layer把一些weight拿掉而已,下图中绿色方框标识出的feature map的output,其实就是hidden layer的neuron的output。
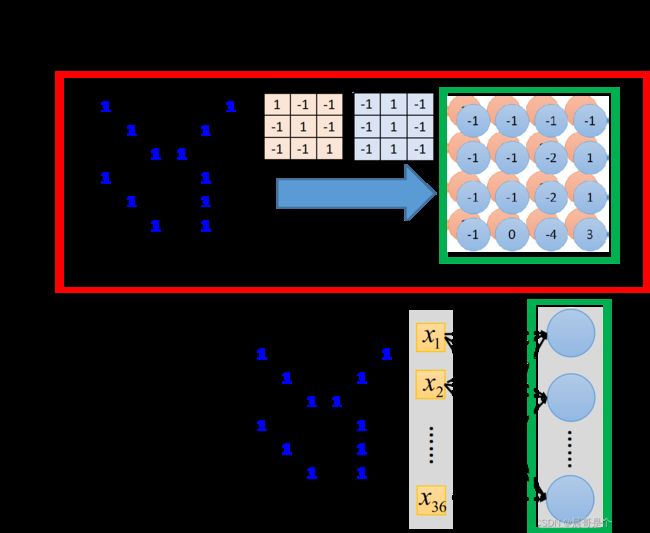
接下来我们来解释这件事情,如下图所示,我们在做convolution时,把filter放在image的左上角,然后再去做inner product,得到一个值3;这件事情等同于,我们现在把这个image的 6 × 6 6\times6 6×6的matrix拉直变成右边这个用于input的vector,然后,你有一个neuron,这些input经过这个neuron之后,得到的output是3,那这个neuron的output怎么来的呢?这个neuron实际上就是由filter转化而来的,我们把filter放在image的左上角,此时filter考虑的就是和它重合的9个pixel,假设你把这一个 6 × 6 6\times6 6×6的image的36个pixel拉成直的vector作为input,那这9个pixel分别就对应着右侧编号1,2,3的pixel,编号7,8,9的pixel跟编号13,14,15的pixel。
如果我们说这个filter和image matrix做inner product以后得到的output 3,就是input vector经过某个neuron得到的output 3的话,这就说明存在这样一个neuron,这个neuron带weight的连线,就只连接到编号为1,2,3,7,8,9,13,14,15的这9个pixel而已,而这个neuron和这9个pixel连线上所标注的的weight就是filter matrix里面的这9个数值,作为对比,Fully connected的neuron是必须连接到所有36个input上的,但是我们现在只用连接9个input,因为我们知道要detect一个pattern,不需要看整张image,看9个input pixel就够了,所以当我们这么做的时候,就用了比较少的参数(这也就是本文一开始说到的,卷积相比于全连接而言,用到更少的参数)
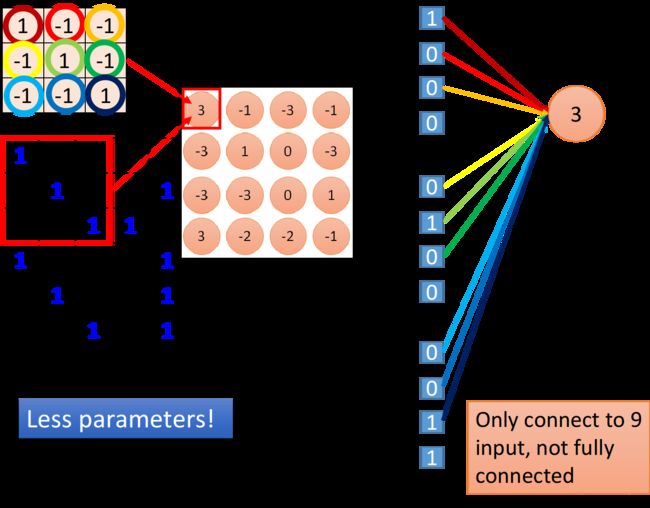
当我们把filter做stride = 1的移动的时候,会发生什么事呢?此时我们通过filter和image matrix的内积得到另外一个output值-1,我们假设这个-1是另外一个neuron的output,那这个neuron会连接到哪些input呢?下图中这个框起来的地方正好就对应到pixel 2,3,4,pixel 8,9,10跟pixel 14,15,16,你会发现output为3和-1的这两个neuron,它们分别去检测在image的两个不同位置上是否存在某个pattern,因此在Fully connected layer里它们做的是两件不同的事情,每一个neuron应该有自己独立的weight。
但是,当我们做这个convolution的时候,首先我们把每一个neuron前面连接的weight减少了,然后我们强迫某些neuron(比如图中output为3和-1的两个neuron),它们一定要共享一组weight,虽然这两个neuron连接到的pixel对象各不相同,但它们用的weight都必须是一样的,等于filter里面的元素值。这件事情就叫做weight share,当我们做这件事情的时候,用的参数,又会比原来更少。
因此我们可以这样想,有这样一些特殊的neuron,它们只连接着9条带weight的线( 9 = 3 × 3 9 = 3\times3 9=3×3对应着filter的元素个数,这些weight也就是filter内部的元素值,上图中圆圈的颜色与连线的颜色一一对应)。当filter在image matrix上移动做convolution的时候,每次移动做的事情实际上是去检测这个地方有没有某一种pattern,对于Fully connected layer来说,它是对整张image做detection的,因此每次去检测image上不同地方有没有pattern其实是不同的事情,所以这些neuron都必须连接到整张image的所有pixel上,并且不同neuron的连线上的weight都是相互独立的。对于convolution layer来说,首先它是对image的一部分做detection的,因此它的neuron只需要连接到image的部分pixel上,对应连线所需要的weight参数就会减少;
其次由于是用同一个filter去检测不同位置的pattern,所以这对convolution layer来说,其实是同一件事情,因此不同的neuron,虽然连接到的pixel对象各不相同,但是在“做同一件事情”的前提下,也就是用同一个filter的前提下,这些neuron所使用的weight参数都是相同的,通过这样一种weight share的方式,再次减少network所需要用到的weight参数。
CNN的本质,就是减少参数的过程。
以上内容说明了CNN相比全连接来说,减少了很多参数。首先当前卷积只取前一层输入的局部节点进行下一轮输出训练;其次多个节点之间可共享参数。
Training
看到这里你可能会问,这样的network该怎么搭建,又该怎么去train呢?首先,第一件事情就是这都是用toolkit做的,所以你大概不会自己去写;如果你要自己写的话,它其实就是跟原来的Backpropagation用一模一样的做法,只是有一些weight就永远是0,你就不去train它,它就永远是0。然后,怎么让某些neuron的weight值永远都是一样呢?你就用一般的Backpropagation的方法,对每个weight都去算出gradient,再把本来要tight在一起、要share weight的那些weight的gradient平均,然后,让他们update同样值就ok了。
Max Pooling
Operation of max pooling
相较于convolution,max pooling是比较简单的,它就是做subsampling,根据filter 1,我们得到一个 4 × 4 4\times4 4×4的matrix,根据filter 2,你得到另外一个 4 × 4 4\times4 4×4的matrix,接下来,我们要做什么事呢?我们把output四个分为一组,每一组里面通过选取平均值或最大值的方式,把原来4个value合成一个 value,这件事情相当于在image每相邻的四块区域内都挑出一块来检测,这种subsampling的方式就可以让你的image缩小。
讲到这里你可能会有一个问题,如果取Maximum放到network里面,不就没法微分了吗?max这个东西,感觉是没有办法对它微分的啊,其实是可以的,类比Maxout network,你就知道怎么用微分的方式来处理它。
The whole CNN
做完一次convolution加一次max pooling,我们就把原来 6 × 6 6\times6 6×6的image,变成了一个 2 × 2 2\times2 2×2的image;至于这个 2 × 2 2\times2 2×2的image,它每一个pixel的深度,也就是每一个pixel用几个value来表示,就取决于你有几个filter,如果你有50个filter,就是50维,像下图中是两个filter,对应的深度就是两维,得到结果就是一个new smaller image,一个filter就代表了一个channel。
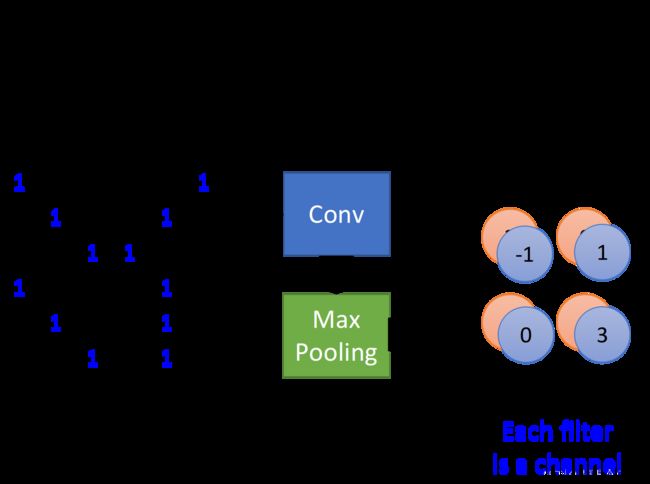
所以,这是一个新的比较小的image,它表示的是不同区域上提取到的特征,实际上不同的filter检测的是该image同一区域上的不同特征属性,所以每一层channel代表的是一种属性,一块区域有几种不同的属性,就有几层不同的channel,对应的就会有几个不同的filter对其进行convolution操作,Each filter is a channel。
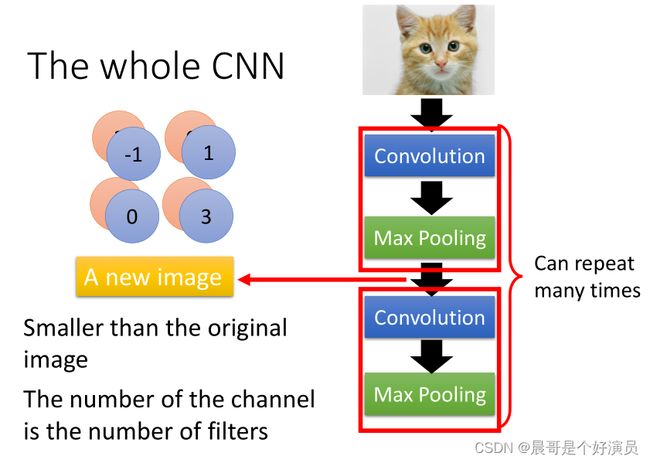
这件事情可以repeat很多次,你可以把得到的这个比较小的image,再次进行convolution和max pooling的操作,得到一个更小的image,依次类推。
有这样一个问题(我之前也一直有这样的疑问,最后终于理解每次卷积实际上是整个Channel上的卷积运算,下一次Channel的个数和当前filter数量有关系):假设我第一个convolution有25个filter,通过这些filter得到25个feature map,然后repeat的时候第二个convolution也有25个filter,那这样做完,我是不是会得到 2 5 2 25^2 252个feature map?
其实不是这样的,你这边做完一次convolution,得到25个feature map之后再做一次convolution,还是会得到25个feature map,因为convolution在考虑input的时候,是会考虑深度的(这里的意思就是卷积操作是会考虑Channel的,每次卷积是按照所有Channel去做卷积),它并不是每一个channel分开考虑,而是一次考虑所有的channel,所以,你convolution这边有多少个filter,再次output的时候就会有多少个channel,The number of the channel is the number of filters,只不过下一次convolution时,25个filter都是一个立方体,它的高有25个value那么高。

这件事可以repeat很多次,通过一个convolution + max pooling就得到新的 image。它是一个比较小的image,可以把这个小的image,做同样的事情,再次通过convolution + max pooling,将得到一个更小的image。
filter
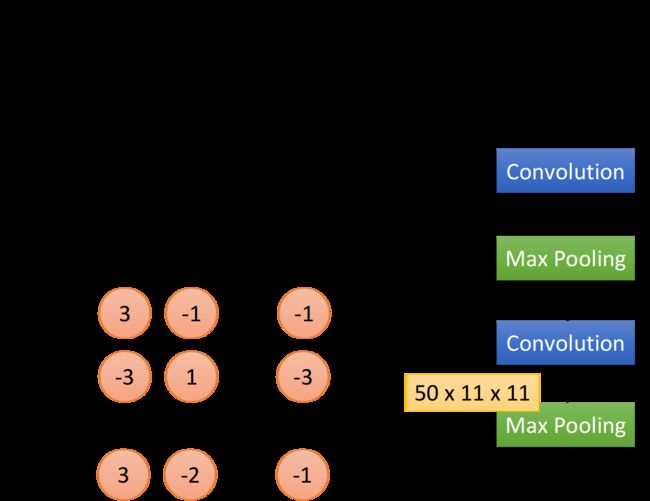
- 假设我们input是一个 1 × 28 × 28 1\times28\times28 1×28×28的image。
- 通过25个filter的convolution layer以后你得到的output,会有25个channel,又因为filter的size是 3 × 3 3\times3 3×3,因此如果不考虑image边缘处的处理的话,得到的channel会是26 × 26 \times26 ×26的,因此通过第一个convolution得到 25 × 26 × 26 25\times26\times26 25×26×26的cubic image。
- 接下来就是做Max pooling,把 2 × 2 2\times2 2×2的pixel分为一组,然后从里面选一个最大的组成新的image,大小为 25 × 13 × 13 25\times13\times13 25×13×13。
- 再做一次convolution,假设这次选择50个filter,每个filter size是 3 × 3 3\times3 3×3的话,output的channel就变成有50个,那13*13的image,通过 3 × 3 3\times3 3×3的filter,就会变成 11 × 11 11\times11 11×11,因此通过第二个convolution得到 50 × 11 × 11 50\times11\times11 50×11×11的image。
- 再做一次Max Pooling,变成 50 × 5 × 5 50\times5\times5 50×5×5。
在第一个convolution里面,每一个filter都有9个参数,它就是一个 3 × 3 3\times3 3×3的matrix;但是在第二个convolution layer里面,虽然每一个filter都是 3 × 3 3\times3 3×3,但它其实不是 3 × 3 3\times3 3×3个参数,因为它的input是一个 25 × 13 × 13 25\times13\times13 25×13×13的cubic,这个cubic的channel有25个,所以要用同样高度的cubic filter对它进行卷积,于是我们的filter实际上是一个 25 × 3 × 3 25\times3\times3 25×3×3的cubic,所以第二个convolution layer这边每个filter共有225个参数
通过两次convolution和max pooling的组合,最终的image变成了 50 × 5 × 5 50\times5\times5 50×5×5的size,然后使用Flatten将这个image拉直,变成一个1250维的vector,再把它丢到一个Fully Connected Feedforward network里面,network structure就搭建完成了。看到这里,你可能会有一个疑惑,第二次convolution的input是 25 × 13 × 13 25\times13\times13 25×13×13的cubic,用50个 3 × 3 3\times3 3×3的filter卷积后,得到的输出时应该是50个cubic,且每个cubic的尺寸为 25 × 11 × 11 25\times11\times11 25×11×11,那么max pooling把长宽各砍掉一半后就是50层 25 × 5 × 5 25\times5\times5 25×5×5的cubic,那flatten后不应该就是 50 × 25 × 5 × 5 50\times25\times5\times5 50×25×5×5吗?
其实不是这样的,在第二次做convolution的时候,我们是用 25 × 3 × 3 25\times3\times3 25×3×3的cubic filter对 25 × 13 × 13 25\times13\times13 25×13×13的cubic input进行卷积操作的,filter的每一层和input cubic中对应的每一层(也就是每一个channel),它们进行内积后,还要把cubic的25个channel的内积值进行求和,作为这个「neuron」的output,它是一个scalar,这个cubic filter对整个cubic input做完一遍卷积操作后,得到的是一层scalar,然后有50个cubic filter,对应着50层scalar,因此最终得到的output是一个 50 × 11 × 11 50\times11\times11 50×11×11的cubic。
这里的关键是filter和image都是cubic,每个cubic filter有25层高,它和同样有25层高的cubic image做卷积,并不是单单把每个cubic对应的channel进行内积,还会把这些内积求和,最终变为1层。因此两个矩阵或者tensor做了卷积后,不管之前的维数如何,都会变为一个scalar。故如果有50个Filter,无论input是什么样子的,最终的output还会是50层。
以上就是对卷积运算的说明,特别是上面提的一个问题,能够让人更了解若图像Channel不为1,那此时的卷积运算该如何运算(由内积+求和两部分组成)。
Flatten
做完convolution和max pooling之后,就是Flatten和Fully connected Feedforward network的部分。Flatten的意思是,把左边的feature map拉直,然后把它丢进一个Fully connected Feedforward network,然后就结束了,也就是说,我们之前通过CNN提取出了image的feature,它相较于原先一整个image的vector,少了很大一部分内容,因此需要的参数也大幅度地减少了,但最终,也还是要丢到一个Fully connected的network中去做最后的分类工作。
What does CNN learn?
如果今天有一个方法,它可以让你轻易地理解为什么这个方法会下这样的判断和决策的话,那其实你会觉得它不够intelligent;它必须要是你无法理解的东西,这样它才够intelligent,至少你会感觉它很intelligent。所以,大家常说deep learning就是一个黑盒子,你learn出来以后,根本就不知道为什么是这样子,于是你会感觉它很intelligent,但是其实还是有很多方法可以分析的,今天我们就来示范一下怎么分析CNN,看一下它到底学到了什么。
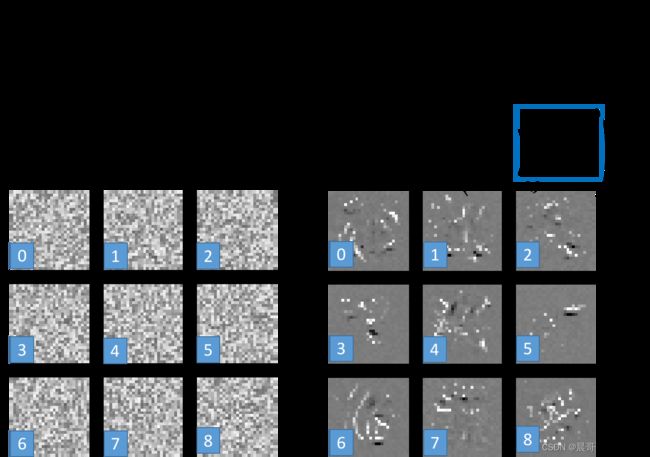
要分析第一个convolution的filter是比较容易的,因为第一个convolution layer里面,每一个filter就是一个 3 × 3 3\times3 3×3的matrix,它对应到 3 × 3 3\times3 3×3范围内的9个pixel,所以你只要看这个filter的值,就可以知道它在detect什么东西,因此第一层的filter是很容易理解的。
但是你比较没有办法想像它在做什么事情的,是第二层的filter,它们是50个同样为 3 × 3 3\times3 3×3的filter,但是这些filter的input并不是pixel,而是做完convolution再做Max pooling的结果,因此filter考虑的范围并不是 3 × 3 = 9 3\times3=9 3×3=9个pixel,而是一个长宽为 3 × 3 3\times3 3×3,高为25的cubic,filter实际在image上看到的范围是远大于9个pixel的,所以你就算把它的weight拿出来,也不知道它在做什么。
那我们怎么来分析一个filter它做的事情是什么呢?你可以这样做:我们知道在第二个convolution layer里面的50个filter,每一个filter的output就是一个 11 × 11 11\times11 11×11的matrix,假设我们现在把第k个filter的output拿出来,如下图所示,这个matrix里的每一个element,我们叫它 a i j k a^k_{ij} aijk,上标k表示这是第k个filter,下标 i j ij ij表示它在这个matrix里的第i个row,第j个column。
接下来我们define一个 a k a^k ak叫做Degree of the activation of the k-th filter,这个值表示现在的第k个filter,它有多被activate,直观来讲就是描述现在input的东西跟第k个filter有多接近,它对filter的激活程度有多少。第k个filter被启动的degree a k a^k ak就定义成,它与input进行卷积所输出的output里所有element的summation,以上图为例,就是这 11 × 11 11\times11 11×11的output matrix里所有元素之和,用公式描述如下:
a k = ∑ i = 1 11 ∑ j = 1 11 a i j k a^k=\sum\limits^{11}_{i=1}\sum\limits^{11}_{j=1} a^k_{ij} ak=i=1∑11j=1∑11aijk
也就是说,我们input一张image,然后把这个filter和image进行卷积所output的 11 × 11 11\times11 11×11个值全部加起来,当作现在这个filter被activate的程度。接下来我们要做的事情是这样子,我们想要知道第k个filter的作用是什么,那我们就要找一张image,这张image可以让第k个filter被activate的程度最大;于是我们现在要解的问题是,找一个image x,它可以让我们定义的activation的degree a k a^k ak最大,即:
x ∗ = arg max x a k x^*=\arg \max\limits_x a^k x∗=argxmaxak
之前我们求minimize用的是gradient descent,那现在我们求Maximum用gradient ascent(梯度上升找最大值)就可以做到这件事了。仔细一想这个方法还是颇为神妙的,因为我们现在是把input x作为要找的参数,对它去用gradient descent或ascent进行update,原来在train CNN的时候,input是固定的,model的参数是要用gradient descent去找出来的;但是现在这个立场是反过来的,在这个task里面model的参数是固定的,我们要用gradient ascent去update这个x,让它可以使degree of activation最大。
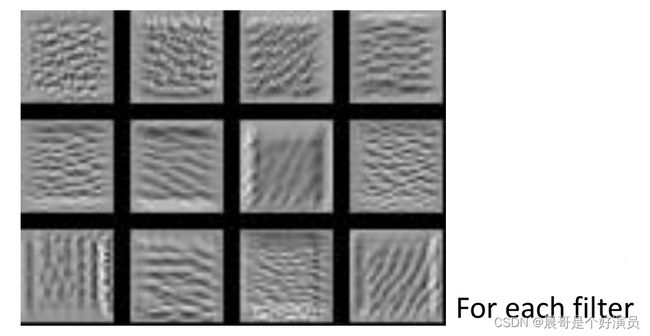
上图就是得到的结果,50个filter理论上可以分别找50张image使对应的activation最大,这里仅挑选了其中的12张image作为展示,这些image有一个共同的特征,它们里面都是一些反复出现的某种texture(纹路),比如说第三张image上布满了小小的斜条纹,这意味着第三个filter的工作就是detect图上有没有斜条纹,要知道现在每个filter检测的都只是图上一个小小的范围而已,所以图中一旦出现一个小小的斜条纹,这个filter就会被activate,相应的output也会比较大,所以如果整张image上布满这种斜条纹的话,这个时候它会最兴奋,filter的activation程度是最大的,相应的output值也会达到最大。
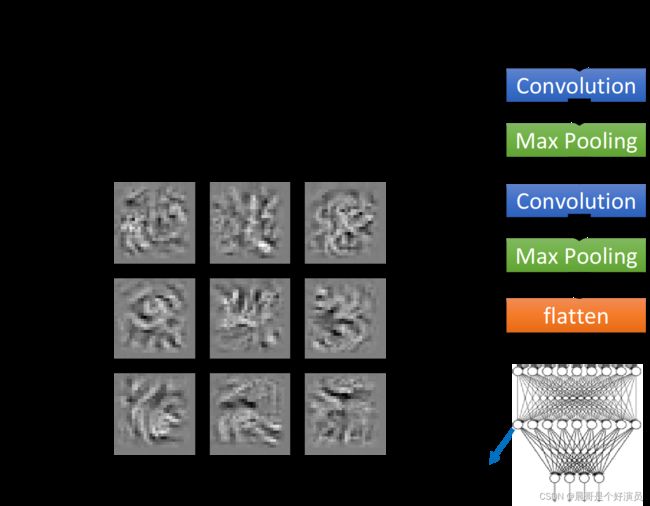
因此每个filter的工作就是去detect某一种pattern,detect某一种线条,上图所示的filter所detect的就是不同角度的线条,所以今天input有不同线条的话,某一个filter会去找到让它兴奋度最高的匹配对象,这个时候它的output就是最大的。我们做完convolution和max pooling之后,会将结果用Flatten展开,然后丢到Fully connected的neural network里面去,之前已经搞清楚了filter是做什么的,那我们也想要知道在这个neural network里的每一个neuron是做什么的,所以就对刚才的做法如法炮制。
我们定义第j个neuron的output就是 a j a_j aj,接下来就用gradient ascent的方法去找一张image x,把它丢到neural network里面就可以让 a j a_j aj的值被maximize,即:
x ∗ = arg max x a j x^*=\arg \max\limits_x a^j x∗=argxmaxaj
找到的结果如上图所示,同理这里仅取出其中的9张image作为展示,你会发现这9张图跟之前filter所观察到的情形是很不一样的,刚才我们观察到的是「类似纹路的东西」,那是因为每个filter考虑的只是图上一部分的vision,所以它detect的是一种texture;但是在做完Flatten以后,每一个neuron不再是只看整张图的一小部分,它现在的工作是看「整张图」,所以对每一个neuron来说,让它最兴奋的、activation最大的image,不再是texture,而是一个完整的图形,虽然它侦测的不是完整的数字,但是是比较大的pattern。
接下来我们考虑的是CNN的output,由于是手写数字识别的demo,因此这里的output就是10维,我们把某一维拿出来,然后同样去找一张image x,使这个维度的output值最大,即
x ∗ = arg max x y i x^*=\arg \max_x y^i x∗=argxmaxyi
你可以想象既然现在每一个output的每一个dimension就对应到一个数字,那如果我们去找一张image x,它可以让对应到数字1的那个output layer的neuron的output值最大,那这张image显然应该看起来会像是数字1,你甚至可以期待,搞不好用这个方法就可以让machine自动画出数字,但实际上我们得到的结果是这样的,如下图所示:
上面的每一张图分别对应着数字0-8,你会发现,可以让数字1对应neuron的output值最大的image其实长得一点也不像1,就像是电视机坏掉的样子(也有点像二维码的马赛克哈哈),为了验证程序有没有bug,这里又做了一个实验,把上述得到的image真的作为testing data丢到CNN里面,结果classify的结果确实还是认为这些image就对应着数字0-8。所以今天这个neural network,它所学到的东西跟我们人类一般的想象认知是不一样的。
那我们有没有办法,让上面这个图看起来更像数字呢?想法是这样的,我们知道一张图是不是一个数字,它会有一些基本的假设,比如这些image,你不知道它是什么数字,你也会认为它显然就不是一个digit,因为人类手写出来的东西就不是长这个样子的,所以我们要对这个x做一些regularization,我们要对找出来的x做一些constraint,我们应该告诉machine说,虽然有一些x可以让你的y很大,但是它们不是数字,那我们应该加上什么样的constraint呢?最简单的想法是说,画图的时候,白色代表的是有墨水、有笔画的地方,而对于一个digit来说,整张image上涂白的区域是有限的,像上面这些整张图都是白白的,它一定不会是数字。
假设image里的每一个pixel都用 x i j x_{ij} xij表示,我们把所有pixel值取绝对值并求和,也就是 ∑ i , j ∣ x i j ∣ \sum\limits_{i,j}|x_{ij}| i,j∑∣xij∣,这一项其实就是之前提到过的L1的regularization,再用 y i y^i yi减去这一项,得到:
x ∗ = arg max x ( y i − ∑ i , j ∣ x i j ∣ ) x^*=\arg \max\limits_x (y^i-\sum\limits_{i,j} |x_{ij}|) x∗=argxmax(yi−i,j∑∣xij∣)
这次我们希望再找一个input x,它可以让 y i y^i yi最大的同时,也要让 ∣ x i j ∣ |x_{ij}| ∣xij∣的summation越小越好,也就是说我们希望找出来的image,大部分的地方是没有涂颜色的,只有少数数字笔画在的地方才有颜色出现,加上这个constraint以后,得到的结果会像下图右侧所示一样,已经隐约有些可以看出来是数字的形状了:
如果再加上一些额外的constraint,比如你希望相邻的pixel是同样的颜色等等,你应该可以得到更好的结果。
以上内容做一个总结就是,卷积神经网络学到的是部分特征,比如图像的某些局部纹理,而卷积后面接一个全连接,这是一个局部到全局的过程,全连接用来学习整体特征。
接下来主要罗列一些卷积在图像上的应用。
Deep Dream
其实,这就是Deep Dream的精神,Deep Dream是说,如果你给machine一张image,它会在这个image里面加上它看到的东西,怎么做这件事情呢?你就找一张image丢到CNN里面去,然后你把某一个convolution layer里面的filter或是fully connected layer里的某一个hidden layer的output拿出来,它其实是一个vector;接下来把本来是positive的dimension值调大,negative的dimension值调小,也就是让正的更正,负的更负,然后把它作为新的image的目标,总体来说就是使它们的绝对值变大,然后用gradient descent的方法找一张image x,让它通过这个hidden layer后的output就是你调整后的target,这么做的目的就是,让CNN夸大化它看到的东西——make CNN exaggerates what is sees。
也就是说,如果某个filter有被activate,那你让它被activate的更剧烈,CNN可能本来看到了某一样东西,那现在你就让它看起来更像原来看到的东西,这就是所谓的夸大化。

如果你把上面这张image拿去做Deep Dream的话,你看到的结果就会好像背后有很多怪兽,比如像上图右侧那一只熊,它原来是一个石头,对机器来说,它看这张图的时候,本来就觉得这个石头有点像熊,所以你就更强化这件事,让它看起来真的就变成了一只熊,这个就是Deep Dream。
Deep Style
Deep Dream还有一个进阶的版本,就叫做Deep Style,如果今天你input一张image,Deep Style做的事情就是让machine去修改这张图,让它有另外一张图的风格,如下所示:

实际上机器做出来的效果惊人的好,具体的做法参考reference:A Neural Algorithm of Artistic Style
这里仅讲述Deep Style的大致思路,你把原来的image丢给CNN,得到CNN filter的output,代表这样image里面有什么样的content,然后你把呐喊这张图也丢到CNN里面得到filter的output,注意在这时我们并不在意一个filter output的value到底是什么,我们真正在意的是,filter和filter的output之间的correlation,这个correlation代表了一张image的style。
接下来你就再用一个CNN去找一张image,这张image的content像左边的图片,比如这张image的filter output的value像左边的图片;同时让这张image的style像右边的图片,所谓的style像右边的图片是说,这张image output的filter之间的correlation像右边这张图片。最终你用gradient ascent找到一张image,同时可以maximize左边的content和右边的style,它的样子就像上面图像中左下角所示。
除此之外李宏毅老师在课堂上还罗列了另外的一些应用,比如将CNN应用于围棋、语音辨识(根据语音的频率)以及文本信息提取等,这里就不赘述。