模型压缩——量化
模型压缩——量化
- 量化
-
- 对称量化和非对称量化
- 矩阵量化
- 卷积网络的量化
- 后训练量化(post training quantization)
- 量化感知训练
- Fold BN 和ReLU
-
- BN
- ReLU
-
- ReLU量化:数学角度和物理含义
- ReLU与Conv的fold
- Add和Concat
-
- Add
- Concat
- 激活函数
-
-
- LeakyReLU
- 非线性激活函数
-
- 1. 激活函数的变形
- 2. 误差估计:1+exp(-x)的32bit定点精度
- 3. 计算1+exp(-x)的32bit定点估计: x ≥ 0.25 x\geq 0.25 x≥0.25时,查表法LUT
- 4. 计算 1 + e − x 1 + e^{-x} 1+e−x 的 32bit 定点估计:x < 0.25时,泰勒展开
- 5. 计算 1 / D 的 定点估计
- 总结
-
- Per-channel量化
- 极端性R的矫正方法
-
- 1. 直方图截断
- 2. 滑动平均
- 3. 均值和方差
- 4. 数学
-
- 搜索minmax
- 搜索 S S S和 Z Z Z
- 后训练量化——Data free quantization
-
- Weight Equalization
- 具体方法
-
- Positive scaling equivariance (伸缩等价)
- 如何找到放缩系数 S S S
- Bias Correction
- 量化训练之可微量化参数—LSQ
-
- 普通量化训练
- LSQ
- LSQ+
量化
int
int8取值范围是-128 - 127(符号位+数值位=8)
Int16 意思是16位整数(16bit integer),相当于short 占2个字节 -32768 ~ 32767
Int32 意思是32位整数(32bit integer), 相当于 int 占4个字节 -2147483648 ~ 2147483647
Int64 意思是64位整数(64bit interger), 相当于 long long 占8个字节 -9223372036854775808 ~ 9223372036854775807
float
一个float单精度浮点数一般是4bytes(32bit)来表示,由三部分组成:符号位、指数部分(表示2的多少次方)和尾数部分(小数点前面是0,尾数部分只表示小数点后的数字)
双精度64位,单精度32位,半精度自然是16位
float32: 单精度浮点数float的这三部分所占的位宽分别为:1,8,23
float16: 半精度浮点数half的这三部分所占的位宽分别为:1,5,10
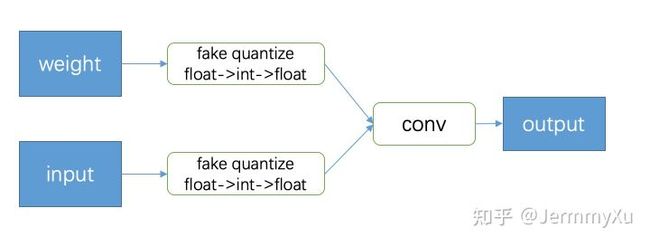
量化的作用:更小的模型尺寸、更低的功耗、更快的计算速度。下图是不同数据结构比较及执行基本运算时的计算消耗。
float32转为int时都是转为int8的原因是:float32的指数部分位宽为8,截断小数部分后就等于int8;虽然int16占用的字节比float32少,但使用int8就能够表示float32的整数部分,所以float32不转为int16。
定点:指的是小数点的位置是固定的,即小数位数是固定的数。
在量化的实现代码中要做溢出保护,加个clip
对称量化和非对称量化
浮点转到定点: Q = r o u n d ( R S ) + Z Q=round(\frac{R}{S})+Z Q=round(SR)+Z
定点转到浮点: R = ( Q − Z ) ∗ S R=(Q-Z)*S R=(Q−Z)∗S
R R R代表真实浮点值, Q Q Q代表量化后的定点值, Z Z Z(Zero)表示0浮点值对应的量化定点值, S S S(Scale)表示定点量化后可表示的最小刻度。
S = R m a x − R m i n Q m a x − Q m i n S=\frac{R_{max}-R_{min}}{Q_{max}-Q_{min}} S=Qmax−QminRmax−Rmin
R m a x / R m i n R_{max}/R_{min} Rmax/Rmin代表最大/最小的浮点值, Q m a x / Q m i n Q_{max}/Q_{min} Qmax/Qmin代表最大/最小的定点值。
Z = Q m a x − R m a x S Z=Q_{max}-\frac{R_{max}}{S} Z=Qmax−SRmax
比如进行int8的量化,数据范围是[-128,127],浮点的最大值最小值分别是 X m a x X_{max} Xmax和 X m i n X_{min} Xmin, X q X_q Xq表示量化后的数据, X f X_f Xf表示浮点数据。
X q = X f S + Z X_q=\frac{X_f}{S}+Z Xq=SXf+Z
S = X m a x − X m i n 127 − ( − 128 ) S=\frac{X_{max}-X_{min}}{127-(-128)} S=127−(−128)Xmax−Xmin
Z = 0 − r o u n d ( X m i n S ) Z=0-round(\frac{X_{min}}{S}) Z=0−round(SXmin) or Z = 255 − r o u n d ( X m a x S ) Z=255-round(\frac{X_{max}}{S}) Z=255−round(SXmax)
round代表四舍五入
量化分为对称量化和非对称量化,上面的是非对称量化,如果是对称量化,则是将原浮点数的范围由 [ X m i n , X m a x ] [X_{min}, X_{max}] [Xmin,Xmax]扩充为 [ − X m a x , X m a x ] [-X_{max}, X_{max}] [−Xmax,Xmax],这里假定 ∣ X m a x ∣ > ∣ X m i n ∣ |Xmax|>|Xmin| ∣Xmax∣>∣Xmin∣。
对称量化图示:
非对称量化图示:

S S S除了上述的公式为还可以采用以下公式:
对称量化: S = 2 n − 1 − 1 m a x ( ∣ x ∣ ) S=\frac{2^{n-1}-1}{max(|x|)} S=max(∣x∣)2n−1−1
非对称量化: S = 2 n − 1 − 1 m a x ( x ) − m i n ( x ) S=\frac{2^{n-1}-1}{max(x)-min(x)} S=max(x)−min(x)2n−1−1
x x x代表浮点数, n n n代表量化后的位宽,float32量化为int8则n为8。
矩阵量化
假设 R 1 R_1 R1和 R 2 R_2 R2是浮点实数上的两个 N × N N\times N N×N的矩阵, R 3 R_3 R3是 R 1 R_1 R1和 R 2 R_2 R2相乘后的矩阵:
R 3 i , k = ∑ j = 1 N R 1 i , j R 2 j , k R_3^{i,k}=\sum_{j=1}^NR_1^{i,j}R_2^{j,k} R3i,k=∑j=1NR1i,jR2j,k
假设 S 1 S_1 S1和 Z 1 Z_1 Z1 是 R 1 R_1 R1矩阵对应的 scale 和 zero point, S 2 S_2 S2、 Z 2 Z_2 Z2、 S 3 S_3 S3、 Z 3 Z_3 Z3 同理,那么通过上式可以推出:
S 3 ( Q 3 i , k − Z 3 ) = ∑ j = 1 N S 1 ( Q 1 i , j − Z 2 ) S 2 ( Q 2 j , k − Z 2 ) S_3(Q_3^{i,k}-Z_3)=\sum_{j=1}^NS_1(Q_1^{i,j}-Z_2)S_2(Q_2^{j,k}-Z_2) S3(Q3i,k−Z3)=∑j=1NS1(Q1i,j−Z2)S2(Q2j,k−Z2)
=> Q 3 i , k = S 1 S 2 S 3 ∑ j = 1 N ( Q 1 i , j − Z 2 ) ( Q 2 j , k − Z 2 ) + Z 3 Q_3^{i,k}=\frac{S_1S_2}{S_3}\sum_{j=1}^N(Q_1^{i,j}-Z_2)(Q_2^{j,k}-Z_2)+Z_3 Q3i,k=S3S1S2∑j=1N(Q1i,j−Z2)(Q2j,k−Z2)+Z3
除了 S 1 S 2 S 3 \frac{S_1S_2}{S_3} S3S1S2外都是定点运算,此时设 M = S 1 S 2 S 3 M=\frac{S_1S_2}{S_3} M=S3S1S2, M M M在 ( 0 , 1 ) (0,1) (0,1)之间(这是通过大量实验统计出来的),因此可以表示成 M = 2 − n M 0 M=2^{-n}M_0 M=2−nM0,其中 M 0 M_0 M0是一个定点实数。因此,如果存在 M = 2 − n M 0 M=2^{-n}M_0 M=2−nM0,那我们就可以通过 M 0 M_0 M0的 bit 位移操作实现 2 − n M 0 2^{-n}M_0 2−nM0,这样整个过程就都在定点上计算了(其实这是由误差的,用这种方法可以得到一个近似的结果)。
卷积网络的量化
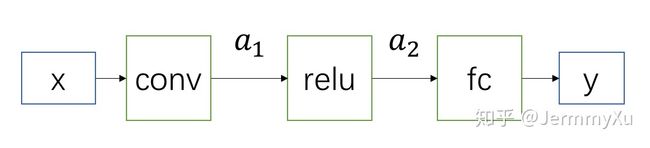
卷积和全连接的本质就是矩阵运算。
假设网络为上图,则这个网络只有三个模块,现在需要把 conv、fc、relu 量化。
假设输入为 x x x,我们可以事先统计样本的最大值和最小值,然后计算出 S x S_x Sx(scale) 和 Z x Z_x Zx (zero point)。
同样地,假设 conv、fc 的参数为 w 1 w_1 w1、 w 2 w_2 w2,以及 scale 和 zero point 为 S w 1 S_{w_1} Sw1、 Z w 1 Z_{w_1} Zw1 、 S w 2 S_{w_2} Sw2 、 Z w 2 Z_{w_2} Zw2 。中间层的 feature map 为 a 1 a_1 a1、 a 2 a_2 a2,并且事先统计出它们的 scale 和 zero point 为 S a 1 S_{a_1} Sa1、 Z a 1 Z_{a_1} Za1 、 S a 2 S_{a_2} Sa2 、 Z a 2 Z_{a_2} Za2 。
(不考虑bias)
a 1 i , k = ∑ j = 1 N x i , j w 1 j , k a_1^{i,k}=\sum_{j=1}^Nx^{i,j}w_1^{j,k} a1i,k=∑j=1Nxi,jw1j,k=> Q a 1 i , k = M ∑ j = 1 N ( Q x i , j − Z x ) ( Q w 1 j , k − Z w 1 ) + Z a 1 Q_{a_1}^{i,k}=M\sum_{j=1}^N(Q_x^{i,j}-Z_x)(Q_{w_1}^{j,k}-Z_{w_1})+Z_{a_1} Qa1i,k=M∑j=1N(Qxi,j−Zx)(Qw1j,k−Zw1)+Za1( M = S w 1 S x S a 1 M=\frac{S_{w_1}S_{x}}{S_{a_1}} M=Sa1Sw1Sx)
得到 conv 的输出后,我们不用反量化回 a 1 a_1 a1,直接用 Q a 1 Q_{a_1} Qa1继续后面的计算即可。
量化后的ReLU的计算公式为 Q a 2 = m a x ( Q a 1 , Z a 1 ) Q_{a_2}=max(Q_{a_1},Z_{a_1}) Qa2=max(Qa1,Za1)
量化后的fc层计算公式为:
Q y i , k = M ∑ j = 1 N ( Q a 2 i , j − Z a 2 ) ( Q w 2 j , k − Z w 2 ) + Z y Q_y^{i,k}=M\sum_{j=1}^N(Q_{a_2}^{i,j}-Z_{a_2})(Q_{w_2}^{j,k}-Z_{w_2})+Z_y Qyi,k=M∑j=1N(Qa2i,j−Za2)(Qw2j,k−Zw2)+Zy
然后通过公式 y = S y ( Q y − Z y ) y=S_y(Q_y-Z_y) y=Sy(Qy−Zy)把结果反量化回去,就可以得到近似原来全精度模型的输出了。
可以看到,上面整个流程都是用定点运算实现的。我们在得到全精度的模型后,可以事先统计出 weight 以及中间各个 feature map 的 min、max,并以此计算出 scale 和 zero point,然后把 weight 量化成 int8/int16 型的整数后,整个网络便完成了量化,然后就可以依据上面的流程做量化推理了。
Conv输出的Scale和zero point需要用一些样本去跑一遍,然后统计
后训练量化(post training quantization)
后训练量化指的是,对预训练后的网络选择合适的量化操作和校准操作,以实现量化损失的最小化,该过程不需要训练,通常不直接更新权重原始数值而是选用合适的量化参数
卷积层的量化(带bias):
conv: a = ∑ i N w i x i + b a=\sum_i^Nw_ix_i+b a=∑iNwixi+b
量化后的Conv: S a ( Q a − Z a ) = ∑ i N S w ( Q w − Z w ) S x ( Q x − Z x ) + S b ( Q b − Z b ) S_a(Q_a-Z_a)=\sum_i^NS_w(Q_w-Z_w)S_x(Q_x-Z_x)+S_b(Q_b-Z_b) Sa(Qa−Za)=∑iNSw(Qw−Zw)Sx(Qx−Zx)+Sb(Qb−Zb)
=> Q a = S w S x S a ∑ i N ( Q w − Z w ) ( Q x − Z x ) + S b S a ( Q b − Z b ) + Z a Q_a=\frac{S_wS_x}{S_a}\sum_i^N(Q_w-Z_w)(Q_x-Z_x)+\frac{S_b}{S_a}(Q_b-Z_b)+Z_a Qa=SaSwSx∑iN(Qw−Zw)(Qx−Zx)+SaSb(Qb−Zb)+Za
此时采用 S w S x S_wS_x SwSx来代替 S b S_b Sb来量化bias(R和Q是通过S和Z来实现映射关系,只要能实现相互映射,那么S和Z怎么取值都可以,只是不同的取值方法需要付出不同的代价),并令 Z b = 0 Z_b=0 Zb=0(对称量化),那么:
Q a = S w S x S a ( ∑ i N ( Q w − Z w ) ( Q x − Z x ) + Q b ) + Z a = M ( ∑ i N Q w Q x − ∑ i N Q w Z x − ∑ i N Q x Z w + ∑ i N Z x Z w + Q b ) + Z a Q_a=\frac{S_wS_x}{S_a}(\sum_i^N(Q_w-Z_w)(Q_x-Z_x)+Q_b)+Z_a=M(\sum_i^NQ_wQ_x-\sum_i^NQ_wZ_x-\sum_i^NQ_xZ_w+\sum_i^NZ_xZ_w+Q_b)+Z_a Qa=SaSwSx(∑iN(Qw−Zw)(Qx−Zx)+Qb)+Za=M(∑iNQwQx−∑iNQwZx−∑iNQxZw+∑iNZxZw+Qb)+Za, M = S w S x S a M=\frac{S_wS_x}{S_a} M=SaSwSx
采用 S w S b S_wS_b SwSb来代替 S b S_b Sb的代价:
S w S_w Sw和 S x S_x Sx分别是将浮点值缩放到int8( 2 2 8 \frac{2}{2^8} 282), S w S x S_wS_x SwSx是将浮点值缩放到int16( 4 2 16 \frac{4}{2^{16}} 2164),而 S b S_b Sb通常将浮点值缩放到int32( 2 2 32 \frac{2}{2^{32}} 2322),此时用 S w S b S_wS_b SwSb来代替 S b S_b Sb就变成将浮点值缩放到int16,会导致精度损失。不过,大部分情况下这点损失是可以忽略的,对效果影响不大,而代码实现上却可以更加高效,因此,这就成了一个约定俗成的操作了。
量化感知训练
Straight Through Estimator
round会导致weight的梯度都为0,这就无法训练了。
那要怎么解决这个问题呢?
一个很容易想到的方法是,直接跳过伪量化的过程,避开 round。直接把卷积层的梯度回传到伪量化之前的 weight 上。这样一来,由于卷积中用的 weight 是经过伪量化操作的,因此可以模拟量化误差,把这些误差的梯度回传到原来的 weight,又可以更新权重,使其适应量化产生的误差,量化训练就可以正常进行下去了。
这个方法就叫做 Straight Through Estimator(STE)。
Pytorch里的code实现示例:https://zhuanlan.zhihu.com/p/158776813
Fold BN 和ReLU
BN
BN和Conv融合的过程看:https://blog.csdn.net/weixin_39994739/article/details/123872722 中的RepVGG
融合后的新Conv表达式: y b n = ∑ i N γ ′ w i x i + γ ′ ( b − μ y + β ) y_{bn}=\sum_i^N\gamma'w_ix_i+\gamma'(b-\mu_y+\beta) ybn=∑iNγ′wixi+γ′(b−μy+β), γ ′ = γ σ y 2 + ϵ \gamma'=\frac{\gamma}{\sqrt{\sigma^2_y+\epsilon}} γ′=σy2+ϵγ
γ \gamma γ和 β \beta β分别为BN的缩放因子和平移尺度, w i w_i wi为原来Conv的weight, x i x_i xi为原来Conv的输入。
此时新Conv的weight和bias分别为 w i ′ = γ ′ w i w'_i=\gamma'w_i wi′=γ′wi和 b ′ = γ ′ ( b − μ y ) + β b'=\gamma'(b-\mu_y)+\beta b′=γ′(b−μy)+β
量化网络时可以将BN融合到Conv中,如果量化时不想更新 BN 的参数 (比如后训练量化),那我们就先把 BN 合并到 Conv 中,直接量化新的 Conv 即可。
如果量化时需要更新 BN 的参数 (比如量化感知训练),需要在forward里更新BN的均值( μ \mu μ)和方差( σ \sigma σ),更新算法为momentum。如图:在生成融合后的Conv的weight前会先按原来的流程先走原来的Conv+BN,然后使用momentum算法更新BN的( μ \mu μ)和( σ \sigma σ),然后将更新后的BN与原来的Conv融合成一个新的Conv,再重新走这个融合后的Conv。(融合后的Conv需要BN的 σ \sigma σ,所以量化训练时要更新BN的参数就要;并且融合后的Conv由BN和原来的Conv组成,它是用来估计量化误差来回传梯度,它的weight在训练的时候不会更新,模型只会更新原来的Conv和BN里的参数,然后再用更新后的原来Conv和BN组成新的融合的Conv)
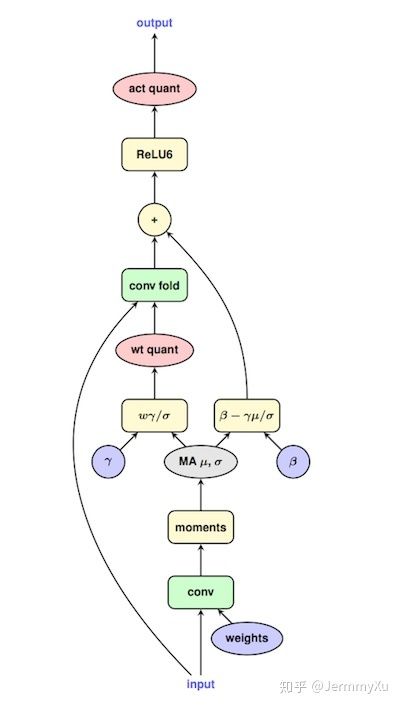
所谓的更新BN参数是值在forward的时候更新不更新( μ \mu μ)和( σ \sigma σ),融合时用的 γ \gamma γ和 β \beta β为训练好的全精度模型里的BN层的值(训练全精度模型不融合BN,量化时才融合),量化时只更新BN的 μ \mu μ和 σ \sigma σ。
ReLU
在全精度里Conv和ReLU是无法融合的,ReLU是一个截断函数,无法将定点反量化成float。
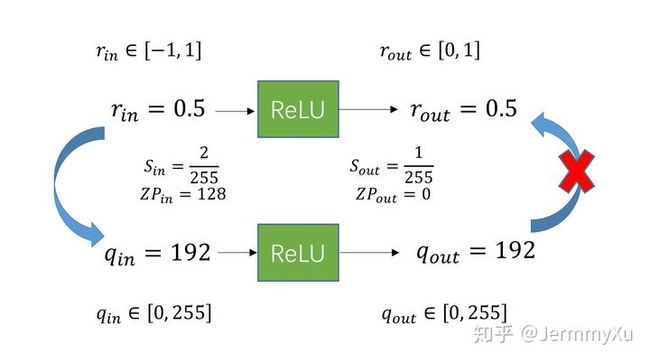
如果使用 ReLU 之后的 scale 和 zp,那我们就可以用量化本身的截断功能来实现 ReLU的作用。
在量化里: Q = r o u n d ( R S + Z ) Q=round(\frac{R}{S}+Z) Q=round(SR+Z)
r o u n d round round除了把 float 型四舍五入转成 int 型外,还需要保证 Q Q Q 的数值在特定范围内「例如 0~255」,相当于要做一遍 clip (截断)操作。因此,这个公式更准确的写法应该是「假设量化到 uint8 数值」:
Q = r o u n d ( c l i p ( R S + Z , 0 , 255 ) ) Q=round(clip(\frac{R}{S}+Z,0,255)) Q=round(clip(SR+Z,0,255))
此时就可以用量化的clip来模拟ReLU,量化融合后的Conv的公式就如上

这里可能有人会觉得ReLU并没有和Conv融合,其实这里是将:量化Conv输出(ReLU的输入)+量化ReLU,融合成量化Conv的输出,从而省去了ReLU这个操作。
在上面的卷积量化里说到可以直接使用 Q a 1 Q_{a_1} Qa1,不用再反量化回去,而在求 Q a 1 Q_{a_1} Qa1时使用了 S a 1 S_{a_1} Sa1和 Z a 1 Z_{a_1} Za1,此时就用这两个参数用 Q o u t Q_{out} Qout和 Z o u t Z_{out} Zout和clip代替。
ReLU量化:数学角度和物理含义
R e L U ( x ) = { x , x ≥ 0 0 , x < 0 ReLU(x)=\begin{cases} x,x\geq 0\\ 0, x<0\end{cases} ReLU(x)={x,x≥00,x<0
=> r 2 = { r 1 , r 1 ≥ 0 0 , r 1 < 0 r_2=\begin{cases} r_1,r_1\geq 0\\ 0, r_1<0\end{cases} r2={r1,r1≥00,r1<0
=> S 2 ( q 2 − Z 2 ) = { S 1 ( q 1 − Z 1 ) , q 1 ≥ Z 1 0 , q 1 < Z 1 S_2(q_2-Z_2)=\begin{cases} S_1(q_1-Z_1),q_1\geq Z_1\\ 0,q_1
=> q 2 = { S 1 S 2 ( q 1 − Z 1 ) + Z 2 , q 1 ≥ Z 1 Z 2 , q 1 < Z 1 q_2=\begin{cases} \frac{S_1}{S_2}(q_1-Z_1)+Z_2,q_1\geq Z_1\\ Z_2,q_1
ReLU的结果的范围为大于等于 ( 0 , + ∞ ) (0,+\infty) (0,+∞),而量化后数值范围为 ( 0 , 255 ) (0,255) (0,255),为保证0点的对齐, Z 2 Z_2 Z2只能取0。
具体实现上没有必要完全按照公式来操作。一:公式内的 scale 操作过于麻烦还掉精度,二: ReLU 本身是有明确的物理意义的,那就是把小于零点的数值截断,其余不变。这个意义在量化里面依然成立。
因此,更简洁明了的方式来实现量化的 ReLU: q 2 = { q 1 , q 1 ≥ Z 1 Z 1 , q 1 < Z 1 q_2=\begin{cases} q_1,q_1\geq Z_1\\ Z_1,q_1
此时,ReLU 前后的 scale 和 zeropoint保持一致
ReLU与Conv的fold
Conv的量化公式: S 3 ( q 3 − Z 3 ) = S 1 S 2 ∑ i N ( q 1 − Z 1 ) ( q 2 − Z 2 ) S_3(q_3-Z_3)=S_1S_2\sum_i^N(q_1-Z_1)(q_2-Z_2) S3(q3−Z3)=S1S2∑iN(q1−Z1)(q2−Z2)
Conv后进ReLU: S 4 ( q 4 − Z 4 ) = { S 3 ( q 3 − Z 3 ) , q 3 ≥ Z 3 , 0 , q 3 < Z 3 = { S 1 S 2 ∑ i N ( q 1 − Z 1 ) ( q 2 − Z 2 ) , q 3 ≥ Z 3 , 0 , q 3 < Z 3 S_4(q_4-Z_4)=\begin{cases} S_3(q_3-Z_3), q_3\geq Z_3,\\0,q_3
=> q 4 = { S 1 S 2 S 4 ∑ i N ( q 1 − Z 1 ) ( q 2 − Z 2 ) + Z 4 , q 3 ≥ Z 3 , Z 4 , q 3 < Z 3 q_4=\begin{cases} \frac{S_1S_2}{S_4}\sum_i^N(q_1-Z_1)(q_2-Z_2)+Z_4, q_3\geq Z_3,\\Z_4,q_3
当量化到int8时需要对数值进行(0,255)的clip,
那么公式应该为: q 4 = { c l i p ( S 1 S 2 S 4 ∑ i N ( q 1 − Z 1 ) ( q 2 − Z 2 ) + Z 4 , 0 , 255 ) , q 3 ≥ Z 3 , Z 4 , q 3 < Z 3 q_4=\begin{cases} clip(\frac{S_1S_2}{S_4}\sum_i^N(q_1-Z_1)(q_2-Z_2)+Z_4,0,255), q_3\geq Z_3,\\Z_4,q_3
在上面说了 Z 4 = 0 Z_4=0 Z4=0,那么当 q 3 < Z 3 q_3
这个公式的意义相当于:计算出 ReLU 之后的 S S S和 Z Z Z,然后把这个 S S S和 Z Z Z对应到 Conv 的输出,这样一来,ReLU 的运算就合并到 Conv 里面了。
正如前面提到的,ReLU 除了做数值上的截断外,其实没有其他操作了,而量化本身自带截断操作,因此才能把 ReLU 合并到 Conv 或者 FC 等操作里面。
Add和Concat
如果允许的话可以先将Add/Concat和Conv融合,然后再量化这个融合后的Conv,不允许再来逐个量化。
融合方法:https://blog.csdn.net/weixin_39994739/article/details/123872722
Add
全精度下Add可以表示为: r 3 = r 1 + r 2 r_3=r_1+r_2 r3=r1+r2
将量化的公式带入后: S 3 ( q 3 − Z 3 ) = S 1 ( q 1 − Z 1 ) + S 2 ( q 2 − Z 2 ) S_3(q_3-Z_3)=S_1(q_1-Z_1)+S_2(q_2-Z_2) S3(q3−Z3)=S1(q1−Z1)+S2(q2−Z2)=> q 3 = S 1 S 3 ( q 1 − Z 1 ) + S 2 S 3 ( q 2 − Z 2 ) + Z 3 q_3=\frac{S_1}{S_3}(q_1-Z_1)+\frac{S_2}{S_3}(q_2-Z2)+Z_3 q3=S3S1(q1−Z1)+S3S2(q2−Z2)+Z3
此时, S 1 S 3 \frac{S_1}{S_3} S3S1和 S 2 S 3 \frac{S_2}{S_3} S3S2需要转为定点,转换方法看矩阵量化
Concat
r 3 = c o n c a t [ r 1 , r 2 ] r_3=concat[r_1,r_2] r3=concat[r1,r2]
代入量化公式: S 3 ( q 3 − Z 3 ) = c o n c a t [ S 2 ( q 2 − Z 2 ) , S 2 ( q 2 − Z 2 ) ] S_3(q_3-Z_3)=concat[S_2(q_2-Z_2),S_2(q_2-Z_2)] S3(q3−Z3)=concat[S2(q2−Z2),S2(q2−Z2)]
=> q 3 = c o n c a t [ S 1 S 3 ( q 1 − Z 1 ) + Z 3 , S 2 S 3 ( q 2 − Z 2 ) + Z 3 ] q_3=concat[\frac{S1}{S3}(q_1-Z_1)+Z_3,\frac{S2}{S3}(q_2-Z_2)+Z_3] q3=concat[S3S1(q1−Z1)+Z3,S3S2(q2−Z2)+Z3]
在这里是将 r 1 r_1 r1和 r 2 r_2 r2的取值范围的合集作为 r 3 r_3 r3的取值范围,此时计算 r 3 r_3 r3的scale和zero point使用的minmax就可以求出来,最后 r 3 r_3 r3对应的定点就可以通过上式求得。
激活函数
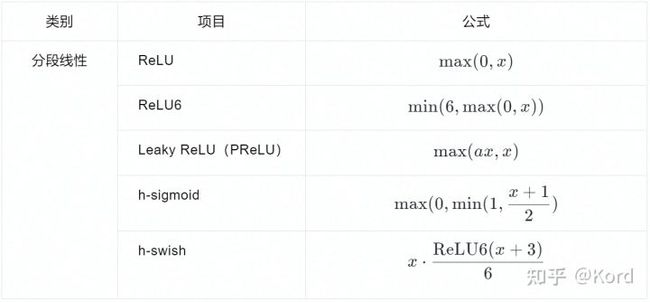
激活函数分线性和非线性,其中LeakyReLU的量化如下,而上图中其它激活函数的量化同理。
LeakyReLU
L e a k y R e L U ( x ) = { x , x ≥ 0 α x , x < 0 LeakyReLU(x)=\begin{cases} x,x\geq 0\\ \alpha x, x<0\end{cases} LeakyReLU(x)={x,x≥0αx,x<0
α \alpha α一般为0~1之间的小数。
float公式: r 2 = { r 1 , r 1 ≥ 0 α r 1 , r 1 < 0 r_2=\begin{cases} r_1,r_1\geq 0\\ \alpha r_1, r_1<0\end{cases} r2={r1,r1≥0αr1,r1<0
量化公式: S 2 ( q 2 − Z 2 ) = { S 1 ( q 1 − Z 1 ) , q 1 ≥ Z 1 α S 1 ( q 1 − Z 1 ) , q 1 < Z 1 S_2(q_2-Z_2)=\begin{cases} S_1(q_1-Z_1),q_1\geq Z_1\\ \alpha S_1(q_1-Z_1), q_1
=> q 2 = { S 1 S 2 ( q 1 − Z 1 ) + Z 2 , q 1 ≥ Z 1 α S 1 S 2 ( q 1 − Z 1 ) + Z 2 , q 1 < Z 1 q_2=\begin{cases} \frac{S_1}{S_2}(q_1-Z_1)+Z_2,q_1\geq Z_1\\ \frac{\alpha S_1}{S_2}(q_1-Z_1)+Z_2, q_1
非线性激活函数
gemmlowp只给出了sigmoid和tanh的32bit定点估计实现,但是可以推广到ELU、SELU、swish、mish等激活函数,源代码链接https://link.zhihu.com/?target=https%3A//github.com/google/gemmlowp/blob/master/fixedpoint/fixedpoint.h
1. 激活函数的变形
sigmoid以 y = 0.5 y=0.5 y=0.5进行进行中心对称,tanh以 y = 0 y=0 y=0进行中心对称。
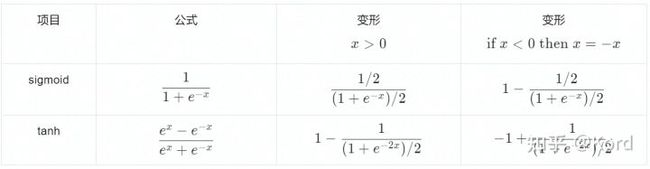
经过变形后,可以看出来计算的关键是对 1 ( 1 + e − x ) / 2 \frac{1}{(1+e^{-x})/2} (1+e−x)/21和 1 ( 1 + e − 2 x ) / 2 \frac{1}{(1+e^{-2x})/2} (1+e−2x)/21进行定点估计。以 1 ( 1 + e − x ) / 2 \frac{1}{(1+e^{-x})/2} (1+e−x)/21为例,计算其定点估计分两步:
1.计算分母 D = 1 + e − x D=1+e^{-x} D=1+e−x的定点估计;
2.计算除法 1 D / 2 \frac{1}{D/2} D/21的定点估计。
2. 误差估计:1+exp(-x)的32bit定点精度
当 x > 0 x>0 x>0时, 0 < e − x < 1 0
假设将整数 1 表示成为 32bit 的定点,其二进制表示为 1000 ⋯ 000 ⏟ 31 个 0 \underbrace{1000\cdots 000}_{31个0} 31个0 1000⋯000,
那么 1 + e − x 1+e^{-x} 1+e−x的最大值不会超过 1111 ⋯ 111 ⏟ 31 个 0 \underbrace{1111\cdots 111}_{31个0} 31个0 1111⋯111,
并且 32bit 的定点表示的误差不超过 1 / 2 31 = 4.657 × 1 0 − 10 1/2^{31}=4.657\times10^{-10} 1/231=4.657×10−10
3. 计算1+exp(-x)的32bit定点估计: x ≥ 0.25 x\geq 0.25 x≥0.25时,查表法LUT
对于 x ≥ 0.25 的时,为了保证计算速度,计算结果直接用查表进行,而不是泰勒展开。查表值如下:
| 浮点值 | 定点表示对应的无符号 int32 值 | 绝对误差(真实浮点值 - int32 值 / 2^31 ) |
|---|---|---|
| exp(-0.25) | 1672461947 | 1.418e-10 |
| exp(-0.5) | 1302514674 | 1.94e-10 |
| exp(-1) | 790015084 | 1.634e-10 |
| exp(-2) | 290630308 | 1.173e-10 |
| exp(-4) | 39332535 | 0.076e-10 |
| exp(-8) | 720401 | 2.291e-10 |
| exp(-16) | 242 | 1.549e-10 |
有了这个表格,对于其他 x ≥ 0.25 的值,以 exp(-5) 的 32bit 定点估计为例,可以如下计算:
e − 5 ≈ L U T ( e − 4 ) ∗ L U T ( e − 1 ) ≈ ( 39332535 x 790015084 ) > > 32 = 7234815 e^{-5} ≈ LUT(e^{-4}) * LUT(e^{-1}) ≈ (39332535 x 790015084) >> 32 = 7234815 e−5≈LUT(e−4)∗LUT(e−1)≈(39332535x790015084)>>32=7234815
其中 >> 32 是指 两个 32bit 整数相乘后再右移32位。因为两个 32bit 整数相乘结果不会超过 64bit,只取其中最高的 32bit 作为定点近似结果。
那么这样做的理论误差为:
$e^{-5} = ( LUT(e^{-4}) + δ(e^{-4})) * ( LUT(e^{-1}) + δ(e^{-1}))
$
≈ L U T ( e − 4 ) ∗ L U T ( e − 1 ) + L U T ( e − 4 ) ∗ δ ( e − 1 ) + δ ( e − 4 ) ∗ L U T ( e − 1 ) < L U T ( e − 4 ) ∗ L U T ( e − 1 ) + δ ( e − 1 ) + δ ( e − 4 ) ≈ LUT(e^{-4}) * LUT(e^{-1}) + LUT(e^{-4}) * δ(e^{-1}) + δ(e^{-4}) * LUT(e^{-1})< LUT(e^{-4}) * LUT(e^{-1}) + δ(e^{-1}) + δ(e^{-4}) ≈LUT(e−4)∗LUT(e−1)+LUT(e−4)∗δ(e−1)+δ(e−4)∗LUT(e−1)<LUT(e−4)∗LUT(e−1)+δ(e−1)+δ(e−4)
查表法能估计的最大 x 为 31.75,即
e − 31.75 = e − 0.25 ∗ e − 0.5 ∗ e − 1 ∗ e − 2 ∗ e − 4 ∗ e − 8 ∗ e − 16 e^{-31.75} =e^{-0.25} * e^{-0.5}* e^{-1} * e^{-2} * e^{-4} * e^{-8} * e^{-16} e−31.75=e−0.25∗e−0.5∗e−1∗e−2∗e−4∗e−8∗e−16
误差不超过: δ ( e − 0.25 ) ∗ δ ( e − 0.5 ) ∗ δ ( e − 1 ) ∗ δ ( e − 2 ) ∗ δ ( e − 4 ) ∗ δ ( e − 8 ) ∗ δ ( e − 16 ) δ(e^{-0.25}) * δ(e^{-0.5}) * δ(e^{-1}) * δ(e^{-2}) * δ(e^{-4}) * δ(e^{-8}) * δ(e^{-16}) δ(e−0.25)∗δ(e−0.5)∗δ(e−1)∗δ(e−2)∗δ(e−4)∗δ(e−8)∗δ(e−16)
问题1:要是 x ≥ 32 x\geq 32 x≥32怎么办?
e − 32 e^{-32} e−32直接近似为0,$1 + e^{-32}近似等于 1,误差不会超过 4.657e-10。
问题2:x = 0.1 怎么计算,或者 x = 5.1 怎么计算?
e − 5.1 = − e − 4 ∗ e − 1 ∗ e − 0.1 e^{-5.1}= -e^{-4}*e^{-1}*e^{-0.1} e−5.1=−e−4∗e−1∗e−0.1
对于剩下的 e − 0.1 e^{-0.1} e−0.1,由于 x 接近 0, e − x e^{-x} e−x接近1,因此查表法精度不够,需要用到泰勒展开。
4. 计算 1 + e − x 1 + e^{-x} 1+e−x 的 32bit 定点估计:x < 0.25时,泰勒展开
gemmlowp中,对 e − x e^{-x} e−x在 x < 0.25 时的近似,为在 x=0.125 处进行4阶泰勒展开近似(还可以选择3阶甚至2阶,或者可以在x=0.25处展开):
e − x ≈ e − 0.125 ( 1 + ( 0.125 − x ) + 1 2 ( 0.125 − x ) 2 + 1 2 ⋅ 3 ( 0.125 − x ) 3 + 1 2 ⋅ 2 ⋅ 2 ⋅ 3 ( 0.125 − x ) 4 ) e^{-x} \approx e^{-0.125}(1+(0.125-x)+\frac{1}{2}(0.125-x)^2+\frac{1}{2\cdot 3}(0.125-x)^3+\frac{1}{2\cdot2\cdot2\cdot 3}(0.125-x)^4) e−x≈e−0.125(1+(0.125−x)+21(0.125−x)2+2⋅31(0.125−x)3+2⋅2⋅2⋅31(0.125−x)4)
那么需要额外增加3个查表值:
| 浮点值 | 定点表示对应的无符号 int32 值 | 绝对误差(真实浮点值 - int32 值 / 2^31 ) |
|---|---|---|
| e − 0.125 e^{-0.125} e−0.125 | 715827883 | 1.552e-10 |
| 0.125 | 536870912 | 0 |
| 1 / 3 | 1895147668 | 1.345e-10 |
除此之外,泰勒展开中 1 / 2 的系数可以用定点右移来计算。
那么到这里,1 + exp(-x) 的 定点近似估计就完成了。
5. 计算 1 / D 的 定点估计
定点的除法,通常是用牛顿法(newton-raphson)转换为若干个定点乘法来计算的。
如果要求解 1 / D 的值,就是计算函数 f ( X ) = 1 / X − D = 0 f(X)=1/X-D=0 f(X)=1/X−D=0的解。那么按照牛顿法的迭代公式为:
X i + 1 = X i − f ( X i ) f ′ ( X i ) = X i − 1 / X i − D − 1 / X i 2 = X i + X i ( 1 − D X i ) X_{i+1}=X_i-\frac{f(X_i)}{f'(X_i)}=X_i-\frac{1/X_i-D}{-1/X_i^2}=X_i+X_i(1-DX_i) Xi+1=Xi−f′(Xi)f(Xi)=Xi−−1/Xi21/Xi−D=Xi+Xi(1−DXi)
每次迭代,1 / D 的估计误差是按平方下降,即
1 − D X i + 1 = 1 − D ( X i + X i ( 1 − D X i ) ) = ( 1 − D X i ) 2 1-DX_{i+1}=1-D(X_i+X_i(1-DX_i))=(1-DX_i)^2 1−DXi+1=1−D(Xi+Xi(1−DXi))=(1−DXi)2
所以从定点的角度,每次迭代后误差位就会翻倍(假设,初始 X 0 X_0 X0的误差是在从左起第1个bit,那么 X 1 X_1 X1的误差是在从左起第2个bit, X 2 X_2 X2的误差是在从左起第4个bit, X 3 X_3 X3的误差是在从左起第8个bit,以此类推,知道误差超过了定点表示的范围就可以忽略不计)。
newton-raphson算法指出,当 D ∈ [ 0.5 , 1 ] D∈ [0.5, 1] D∈[0.5,1]时,取 X 0 = 48 / 17 − 32 / 17 ∗ D X_0=48/17-32/17*D X0=48/17−32/17∗D,那么
X 1 X_1 X1的精度满足8bit定点表示,
X 2 X_2 X2的精度满足16bit定点表示,
X 3 X_3 X3的精度满足32bit定点表示,所以最多迭代3次即可。
当 D = 1 + e − x D = 1 + e^{-x} D=1+e−x时, D ∈ [ 1 , 2 ] D ∈ [1, 2] D∈[1,2],因此不能直接计算 1 1 + e − x \frac{1}{1+e^{-x}} 1+e−x1,而要计算 1 ( 1 + e − x ) / 2 \frac{1}{(1+e^{-x})/2} (1+e−x)/21的值。(把D乘以k,变成在[0.5,1]内,然后计算进行迭代,最后的时候再反乘以 1 k \frac{1}{k} k1)
因此,计算 1 ( 1 + e − x ) / 2 \frac{1}{(1+e^{-x})/2} (1+e−x)/21的伪代码为
D = (1 + LUT(exp(-x)) / 2
X = LUT(48/17) - LUT(32/17) * D
loop i = 1 : 3
X = X + X * (1 - D * X)
end loop
需要增加两个查表值
| 浮点值 | 定点表示对应的无符号 int32 值 | 绝对误差(真实浮点值 - int32 值 / 2^31 ) |
|---|---|---|
| 48 / 17 | 1515870810 | 6.574e-10 |
| 32 / 17 | 1895147668 | 4.383e-10 |
总结
以上就是非线性激活函数的定点量化过程,主要包含3个步骤:
- 计算 1 + e − x 1 + e^{-x} 1+e−x 在 x ≥ 0.25 时的定点估计
- 计算 1 + e − x 1 + e^{-x} 1+e−x在 x < 0.25 时的定点估计
- 计算 1 / D 的定点估计
Per-channel量化
在考虑kernel的情况下,那么卷积运算更准确的表示应该为:
r 3 i , j , o c = ∑ i c ∑ m ∑ n r 1 i − m , j − n , i c r 2 i − m , j − n , i c r_3^{i,j,oc}=\sum_{ic}\sum_m\sum_nr_1^{i-m,j-n,ic}r_2^{i-m,j-n,ic} r3i,j,oc=∑ic∑m∑nr1i−m,j−n,icr2i−m,j−n,ic
o c oc oc代表输出通道的index, i c ic ic代表输入通道的index。下面为了公式简洁会省略 i i i、 j j j这些跟位置相关的 index。
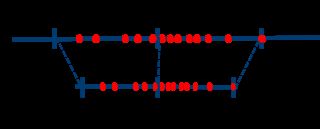
per-layer 量化下,整个 tensor 会共用一个 scale 和 zero point。
就像下面这张图给出的这样:

因此量化后的卷积运算为:
S 3 ( q 3 o c − Z 3 ) = ∑ i c ∑ m ∑ n S 1 ( q 1 i c − Z 1 ) S 2 ( q 2 i c − Z 2 ) S_3(q_3^{oc}-Z_3)=\sum_{ic}\sum_m\sum_nS_1(q_1^{ic}-Z_1)S_2(q_2^{ic}-Z_2) S3(q3oc−Z3)=∑ic∑m∑nS1(q1ic−Z1)S2(q2ic−Z2)
=> q 3 o c = S 1 S 2 S 3 ∑ i c ∑ m ∑ n ( q 1 i c − Z 1 ) ( q 2 i c − Z 2 ) + Z 3 q_3^{oc}=\frac{S_1S_2}{S_3}\sum_{ic}\sum_m\sum_n(q_1^{ic}-Z_1)(q_2^{ic}-Z_2)+Z_3 q3oc=S3S1S2∑ic∑m∑n(q1ic−Z1)(q2ic−Z2)+Z3
per-channel 量化并非时每个channel都单独计算一个scale和zeropoint,如下图所示:

这样做的话每个channle都要算一个scale和zeropoint,虽然精度会比较高,但卷积就没法加速了,计算开销会成倍上升。
所以,实践中的per-channel 量化其实是按照下图的方式做的:
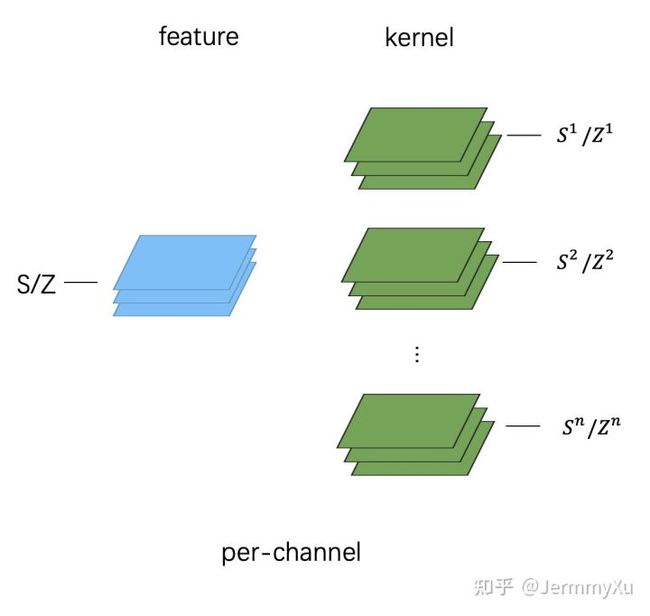
这其中的差别就在于,feature 还是整个 tensor 共用一个 scale 和 zeropoint,但每个 kernel 会单独统计一个 scale 和 zeropoint(注意是每个 kernel,而不是 kernel 的每个 channel)。
在这种定义下,per-channel 量化和 per-layer 就变得很相似了:
S 3 ( q 3 o c − Z 3 ) = ∑ i c ∑ m ∑ n S 1 ( q 1 i c − Z 1 ) S 2 ( q 2 i c − Z 2 ) S_3(q_3^{oc}-Z_3)=\sum_{ic}\sum_m\sum_nS_1(q_1^{ic}-Z_1)S_2(q_2^{ic}-Z_2) S3(q3oc−Z3)=∑ic∑m∑nS1(q1ic−Z1)S2(q2ic−Z2)
=> q 3 o c = S 1 S 2 S 3 ∑ i c ∑ m ∑ n ( q 1 i c − Z 1 ) ( q 2 i c − Z 2 ) + Z 3 q_3^{oc}=\frac{S_1S_2}{S_3}\sum_{ic}\sum_m\sum_n(q_1^{ic}-Z_1)(q_2^{ic}-Z_2)+Z_3 q3oc=S3S1S2∑ic∑m∑n(q1ic−Z1)(q2ic−Z2)+Z3
在这里的公式和上面的per-layer量化的差别是:对于不同的 o c oc oc, q 3 o c q_3^{oc} q3oc对应的 S 2 S_2 S2是不一样的,因为每个 kernel 都会有自己专属的 S 2 S_2 S2。因此,对于每一个 o c oc oc,需要单独用 S 1 S 2 S 3 \frac{S_1S_2}{S_3} S3S1S2重新 requant 一下。而在 per-layer 量化里面,我们是可以把整个 output feature 都算完,再统一 requant 的。
注意:MobileNet使用per-layer量化后很差的原因是它使用了Depthwise Separable Convolution。Depthwise Separable Convolution中由于每一张feature都是由单独的一个kernel生成的,而Depthwise Separable Convolution中每个kernel的数值分布差异很大(普通Conv里的每个kernel都对所有feature进行卷积,所以kernel之间的关联性会比较大,分布差异就不会很大),因此导致了MobileNet使用per-layer量化后很差,而使用per-channel的结果就还行。
极端性R的矫正方法
举个栗子,如果某个 weight 里面的数值是 [-0.1, 0.2, 0.3, 255.1],那我们统计出来的 minmax 就是 -0.1 和 255.1,如此一来,0.2、0.3 这样的数值就会被映射到同一个定点数,信息损失相当严重,而它们对结果影响可能远大于 255.1。因此,在这种情况下,我们宁愿把 255.1 损失掉,也希望尽可能把 0.2、0.3 保持下来。因此,就需要对这种极端的R进行矫正,矫正方法由底下几种。
1. 直方图截断
既然离群点影响很大,那最容易想到的解法就是排除这些离群点的干扰。我们可以把 weight 或者 feature map 的数值范围统计出一个直方图,根据直方图舍弃前后 m% 的数值,直接用剩下的数值来确定 minmax。
2. 滑动平均
除此之外,还有一种对 feature map 比较有效的统计方法。 这也是 Google 论文提到的一种技巧。我们把矫正数据集分为几个 batch,逐次输入到网络中统计数值。每次更新数值范围时,按照 r m a x t = r m a x t ∗ ( 1 − α ) + r m a x t − 1 ∗ α r_{max}^t=r_{max}^t*(1-\alpha)+r_{max}^{t-1}*\alpha rmaxt=rmaxt∗(1−α)+rmaxt−1∗α来更新,其中, r m a x t − 1 r_{max}^{t-1} rmaxt−1是上一次统计到的最大值。通过控制 α \alpha α的数值,可以控制新数据对历史统计数据的影响,让最终统计到的数值能大致涵盖大部分数值,但又不会被一些离群点主导。
3. 均值和方差
一个不成文的约定:我们通常会假设 weight 和 feature 的数值呈正态分布。在此假设下,我们可以统计出测试数据中 weight 或者 feature 的均值 μ \mu μ和方差 σ \sigma σ,然后,根据正态分布的性质,在区间 ( μ − 3 σ , μ + 3 σ ) (\mu-3\sigma,\mu+3\sigma) (μ−3σ,μ+3σ)之间的数值占了 99+%,因此,可以令 r m i n = μ − 3 σ r_{min}=\mu-3\sigma rmin=μ−3σ、 r m a x = μ + 3 σ r_{max}=\mu+3\sigma rmax=μ+3σ,这样就基本涵盖了大部分数值,也避免了一些离群点的影响。
当然,如果实际的数值分布不是正态的,比如,是个双峰分布,那可能就 gg 了。
4. 数学
使用一些metric来度量当前取的minmax值是否合适。
搜索minmax
常采用的是TRT量化方法,TRT采用的是8bit对称量化,即正数区间量化到 [0, 127],负数区间量化到 [-128, 0)。量化的大致过程如下:
- 首先根据矫正数据集确定数值范围 [ r m i n , r m a x ] [r_{min},r_{max}] [rmin,rmax];
- 把这个范围区间划分为 2048 份 (相当于离散化成 2048 个 bin 的直方图,具体多少 bin 可以调整);
- 以最前面的 128 个 bin 作为基准,逐次向后搜索,每次扩增一个 bin 的长度,得到一个新的数值范围。然后把这个数值范围重新划分为一个 128 个 bin 的直方图 Q Q Q(这一步相当于舍弃了部分数值信息,并做了量化);
- 那要如何评价当前这个数值范围是否合适呢?这个时候 KL 散度就能派上用场了。我们把剩下那些没有搜索到的数值压缩到当前搜索到的 bin 上,得到一个信息基本没有损失的直方图 P P P,如果我们之前搜索到的 Q Q Q跟 P P P相比信息损失最小 (即 KL 散度最小),那这个 Q Q Q对应的数值范围就是最好的数值范围。不巧的是,KL 散度需要两个直方图的 bin 是一样的 (L1 距离等也有这个要求),而 Q Q Q之前已经被量化到 128 个 bin 了。为了解决这个问题,需要把 Q Q Q再反量化到跟 P P P的 bin 数相同,这样就可以计算信息损失了。
- 重复步骤 3、4,记录每次搜索的 KL 散度大小,直到搜索完整个范围。KL 散度最小的搜索范围,就是理论上信息损失最小的 minmax。
由于大部分情况下,数值分布都近似于正太分布 (即大部分数值会集中在一个区间内),而随着搜索范围增大,离群点会越来越多,但中间那些真正有用的、比较集中的数值就只能用更少的 bin 来表达 (要知道总共只有 128 个 bin 可以承载信息)。因此,绝大部分情况下,舍弃离群点 (outlier) 获得的收益往往是更大的。
TRT的基本套路就是:从一个小的搜索范围逐渐扩大出去,每次搜索都量化一遍信息 (比如划分成固定 bin 数的直方图),然后用一种度量方式 (KL 散度、L1 距离等) 来衡量完整信息和量化信息之间的差异,差异最小的区间就是我们需要的 minmax。
搜索 S S S和 Z Z Z
除了 minmax,也可以搜索合适的 S S S和 Z Z Z。这里的套路和前面是类似的,也是根据量化前后的信息损失来找出最优解。
假设量化前的浮点 weight 或 feature map 为向量 r r r,那么量化后为:
q = c l i p ( r o u n d ( r S + Z ) 0 , 255 ) q=clip(round(\frac{r}{S}+Z)0,255) q=clip(round(Sr+Z)0,255)
再进行反量化后得到:
r ^ = S ∗ ( q − Z ) = S ∗ ( c l i p ( r o u n d ( r S + Z ) 0 , 255 ) − Z ) \hat{r}=S*(q-Z)=S*(clip(round(\frac{r}{S}+Z)0,255)-Z) r^=S∗(q−Z)=S∗(clip(round(Sr+Z)0,255)−Z)
接下来就可以度量量化的信息损失了,在论文 EasyQuant 2 ^2 2中使用了余弦相似性,因此这里也以余弦相似性为例。
假设矫正数据集总共有 N N N个样本,那么平均相似性为:
1 N ∑ i N c o s ( r i , r ^ i ) = 1 N ∑ i N r i r ^ i ∣ ∣ r i ∣ ∣ ∣ ∣ r ^ i ∣ ∣ \frac{1}{N}\sum_i^Ncos(r_i,\hat{r}_i)=\frac{1}{N}\sum_i^N\frac{r_i\hat{r}_i}{||r_i||||\hat{r}_i||} N1∑iNcos(ri,r^i)=N1∑iN∣∣ri∣∣∣∣r^i∣∣rir^i
而要求解的,就是使得这个相似性最大的 S S S和 Z Z Z(余弦相似性越大,信息损失越小):
m a x S , Z 1 N ∑ i N r i r ^ i ∣ ∣ r i ∣ ∣ ∣ ∣ r ^ i ∣ ∣ \underset{S,Z}{max}\frac{1}{N}\sum_i^N\frac{r_i\hat{r}_i}{||r_i||||\hat{r}_i||} S,ZmaxN1∑iN∣∣ri∣∣∣∣r^i∣∣rir^i
搜索 S S S和 Z Z Z的方法有很多,比如可以参考前面 TRT 的思路,先设定 S S S和 Z Z Z的范围,然后我们用两个循环分别对 S S S和 Z Z Z进行搜索遍历,计算每一步搜索的相似性分数,分数最大的就是需要的 S S S和 Z Z Z。这种方法就是通常所说的Grid Search。
后训练量化——Data free quantization
论文:Data-Free Quantization Through Weight Equalization and Bias Correction
这篇论文的关键点是Data-Free(噱头,对feature量化的时候还是需要Data)、Weight Equalization、Bias Correction
Weight Equalization
MobileNet在per-layer 量化精度下降极其严重,只有用上 per-channel 的时候才能挽救一下。而 weight equalization 要做的事情,就是在使用 per-layer 量化的情况下,使用一些方法使得不同卷积核之间的数值分布能够均衡一些,让大家的数值分布都尽量接近,这样就可以用 per-layer 量化实现 per-channel 的精度 (毕竟 per-channel 实现上会比 per-layer 复杂一些)。
除了 weight 的问题之外,研究人员发现,模型量化的时候总是会产生一种误差,这种误差对数值分布的形态影响不大,但却会使整个数值分布发生偏移 (biased)。
假设有 N N N个样本,那么对于 feature map 上面的每一个数值,我们可以用下面这种方式计算偏移误差 (biased error):
E [ y j ~ − y j ] ≈ 1 N ( ∑ n ( W ~ x n ) j − ( W x n ) j ) E[\tilde{y_j}-y_j]\approx\frac{1}{N}(\sum_n(\tilde{W}x_n)_j-(Wx_n)_j) E[yj~−yj]≈N1(∑n(W~xn)j−(Wxn)j)
其中, W ~ \tilde{W} W~是量化后再反量化的 weight (即带了量化误差), W W W是原先的 weight, x n x_n xn是输入,对应的 y j ~ \tilde{y_j} yj~是量化后的输出, y j y_j yj是原输出。
用这个公式可以算出引入量化误差后的 feature map 上每个点和原先的相差了多少,统计一下这些误差,就得到下面这张图:
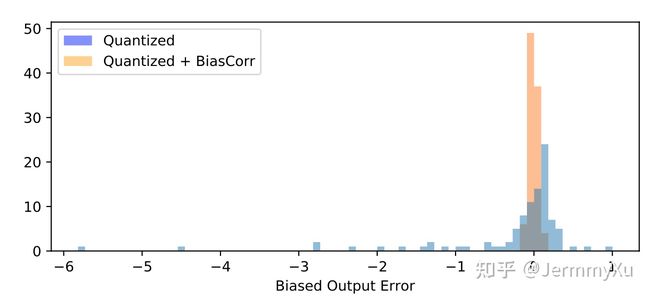
这里面蓝色的柱状图就统计了量化后的误差分布,看得出,有不少 feature 的误差已经超过了 1,而理想状态下,我们是希望量化后的误差能集中到 0 附近,越接近 0 越好,就像橙色直方图那样。
蓝色部分的分布状况是一种偏移(biased)。
研究人员发现,用上 weight equalization 后,这种 biased error 会更加地突出。而 Bias Correction 就是为了解决该问题提出的。
具体方法
要实现 Weight Equalization,一个很直接的想法就是对卷积核的每个 kernel (或者是全连接层的每个权重通道) 都乘上一个缩放系数,对数值范围大的 kernel 进行缩小,范围小的则扩大。
Positive scaling equivariance (伸缩等价)
卷积层和全连接层,本质上都是加权求和 (线性映射),因此都满足下式:
f ( s x ) = s f ( x ) f(sx)=sf(x) f(sx)=sf(x)( s s s必须是正数)
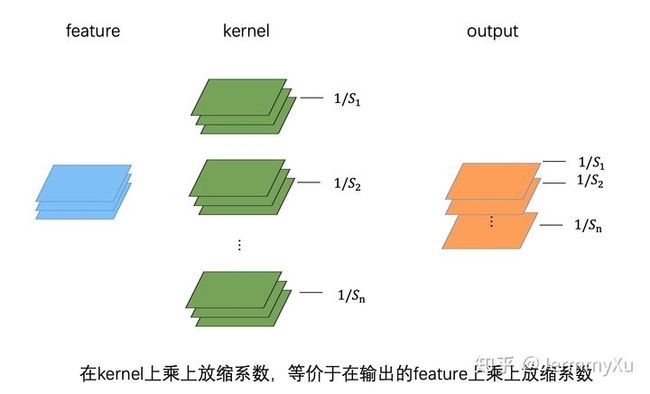
对于卷积来说,在卷积核上乘以放缩系数,等效于在输出上乘以同样的放缩系数。全连接层同理。(简单起见,上图中的 bias 被省略了)
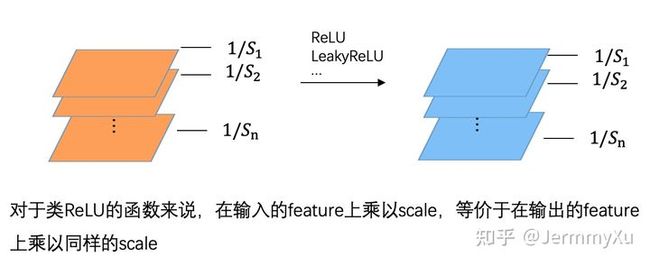
如果卷积后跟着一个类 ReLU 的激活函数 (ReLU、LeakyReLU 等),那么上式也是成立的,因为 ReLU 这类激活函数本质上也是分段线性的。
R e L U ( s x ) = s R e L U ( x ) ReLU(sx)=sReLU(x) ReLU(sx)=sReLU(x)
其实不只是 ReLU,任何分段线性的函数,都满足 Positive scaling equivariance。
有了以上这些性质后,就可以在下一个卷积核上乘以一个逆放缩系数,从而抵消第一个卷积核放缩的影响,实现计算上的等效性。
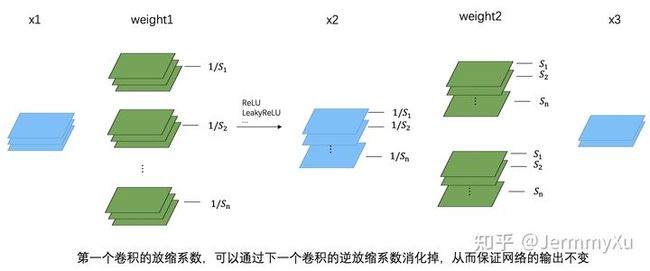
这一切成立的前提都在于 conv 和类 ReLU 函数满足公式 f ( s x ) = s f ( x ) f(sx)=sf(x) f(sx)=sf(x),从而可以把缩放系数等价地作用到下一层输入上,并进一步被下一层卷积的逆缩放系数吸收掉。需要注意的是,第一个卷积的缩放系数是乘在每个 kernel 上,而第二个卷积的逆缩放系数则是乘在每个 kernel 的 channel 上的。
这个过程总结一下就得到了论文中的公式:
y = f ( W ( 2 ) f ( W ( 1 ) x + b ( 1 ) ) + b ( 2 ) ) y=f(W^{(2)}f(W^{(1)}x+b^{(1)})+b^{(2)}) y=f(W(2)f(W(1)x+b(1))+b(2))
= f ( W ( 2 ) S f ^ ( S − 1 W ( 1 ) x + S − 1 b ( 1 ) ) + b ( 2 ) ) =f(W^{(2)}S\hat{f}(S^{-1}W^{(1)}x+S^{-1}b^{(1)})+b^{(2)}) =f(W(2)Sf^(S−1W(1)x+S−1b(1))+b(2))
= f ( W ^ ( 2 ) f ^ ( W ^ ( 1 ) x + b ^ ( 1 ) ) + b ( 2 ) ) =f(\hat{W}^{(2)}\hat{f}(\hat{W}^{(1)}x+\hat{b}^{(1)})+b^{(2)}) =f(W^(2)f^(W^(1)x+b^(1))+b(2))
如何找到放缩系数 S S S
在 weight 上乘以 S S S的目的是为了让不同 kernel 之间的数值尽可能相同,从而达到均衡化。为此,论文定义了一个指标来描述这种均衡化的程度 (称为均衡化系数):
p i ( 1 ) = r i ( 1 ) R ( 1 ) p_i^{(1)}=\frac{r_i^{(1)}}{R^{(1)}} pi(1)=R(1)ri(1)
这里面, r i ( 1 ) r_i^{(1)} ri(1)表示第一个卷积核的第 i 个 kernel 的数值范围, R ( 1 ) R^{(1)} R(1)则表示第一个卷积核整体的数值范围。理想情况下,当然是每个 kernel 的数值范围都近似整个卷积核的数值范围 (即 p ( 1 ) p^{(1)} p(1)的数值越大),均衡化的程度越好。
不过,由于把缩放的代价转移到了下一个卷积核上了,因此,我同时要让这种代价越小越好。所以,对于下一个卷积核来说,它那些被缩放的权重也应该尽可能地均衡。
需要注意的是,在计算下一个卷积核的均衡化系数时,不能像第一个卷积核一样每个 kernel 单独计算,而应该把相同缩放系数的通道重新排列后,再按照前者的方式计算。(只是求解缩放系数的时候需要这么处理,正常卷积运算还是按照原来的卷积核来算)
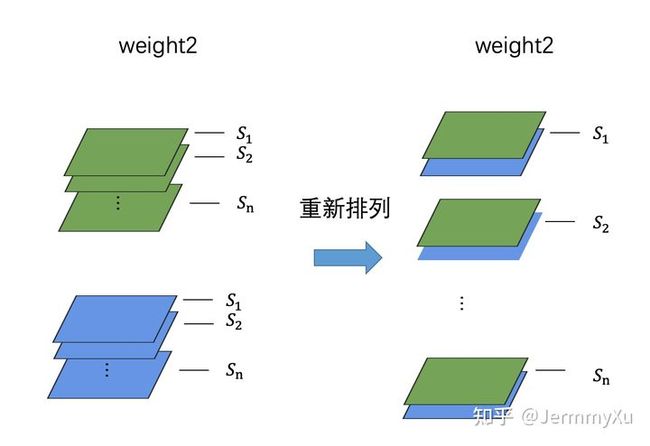
这种处理方法在数学优化以及代码实现上都能带来极大的方便。卷积核重新排列后,第二个卷积核的 kernel 数就和第一个相同了。
由此,论文给出了最终的优化函数:
m a x S ∑ i p i ( 1 ) p i ( 2 ) \underset{S}{max}\sum_ip_i^{(1)}p_i^{(2)} Smax∑ipi(1)pi(2)
这个式子翻译成人话就是,第一个卷积核和第二个卷积核 (重排后),它们每个 kernel 的均衡化系数要尽可能大,而让所有 kernel 的系数之和最大的那个缩放系数 S S S,就是我们想要的。
论文只针对对称量化求解这个函数,非对称量化结果也是一样的,具体求解过程在论文附录里面已经给出了。
这里直接给出最终的答案:
s i = 1 r i ( 2 ) = r i ( 1 ) r i ( 2 ) s_i=\frac{1}{r_i^{(2)}}=\sqrt{r_i^{(1)}r_i^{(2)}} si=ri(2)1=ri(1)ri(2)
这就是每个 kernel 最优的放缩系数了。
Bias Correction
在上面提到,量化可能会破坏模型的数值分布,使得输出结果产生一个偏移 (biased),因此需要对这个偏移做一点矫正。
假设原始全精度模型的权重是 W W W,而带了量化误差的权重是 W ^ \hat{W} W^(这里的权重是将 W W W进行量化后再反量化得到的)。由于 bias 量化引起的误差一般较小,一般不考虑,因此,可以大致估算出量化导致的误差偏移为:
E [ ϵ x ] = E [ W x ] − E [ W ^ x ] = E [ ( W − W ^ ) x ] E[\epsilon x]=E[Wx]-E[\hat{W}x]=E[(W-\hat{W})x] E[ϵx]=E[Wx]−E[W^x]=E[(W−W^)x]
E [ x ] E[x] E[x]表示从几个样本上计算得到的均值,又称期望,而 ϵ = W − W ^ \epsilon=W-\hat{W} ϵ=W−W^。
算出误差 E [ x ] E[x] E[x]后,可以从卷积或者全连接层的 bias 里面减掉这个误差,这样一来,就通过 bias 把这个偏移抵消掉,因此把这种方法称为 bias correction。
在手头上有数据集的情况下,我们可以从数据集里面拿出 N N N 个样本,然后,分别跑一遍全精度模型和量化模型 (这里是量化后再反量化的权重,同时做了 weight equalization),针对每一层输出,按照公式 E [ ϵ x ] = E [ ( W − W ^ ) x ] E[\epsilon x]=E[(W-\hat{W})x] E[ϵx]=E[(W−W^)x]计算出偏移后,再从对应层的 bias 上减掉这个偏移即可。需要注意的是,后面层在计算误差时,要等前面层已经做了 bias correction 后再进行,防止前面层已经矫正的偏移量传导到后面的层。
如果手头上没有数据,而网络里面刚好使用了 BatchNorm,那就又到了论文秀 Data-Free 的时间了。
根据期望的性质 E [ ϵ x ] = ϵ E [ x ] E[\epsilon x]=\epsilon E[x] E[ϵx]=ϵE[x],由于 ϵ \epsilon ϵ是可以根据权重计算的,因此只要知道 E [ x ] E[x] E[x],即输入的期望即可。那该如何在没有输入数据的情况下,得到输入的期望呢?论文假定,对于某一层 Conv 层,它的前一层跟着一个 BN 层和一个类 ReLU 的激活函数:

只要算出 ReLU 的输出的均值,那就相当于得到了所要求的 Conv 的输入均值 E [ x ] E[x] E[x]。这里起关键作用的是 BN,BN 里面有两个参数: γ \gamma γ和 β \beta β,它们表示 scale 和 shift,但同时它们还包含另一层物理意义,即方差和均值。换句话说,上面这幅图里面, x p r e x^{pre} xpre的均值就是 β \beta β。
所以,如果没有中间的 ReLU 函数的话,就可以直接用 BN 的参数 β \beta β作为 E [ x ] E[x] E[x]了。而如果 ReLU 存在的话,就需要考虑 ReLU 这类函数对数据分布的影响。论文在附录里面用了较大篇幅推出了 ReLU 后的均值:
E [ x c ] = E [ R e L U ( x c p r e ) ] = γ c N ( − β c γ c ) + β c [ 1 − ϕ ( ( − β c γ c ) ] E[x_c]=E[ReLU(x_c^{pre})]=\gamma_cN(\frac{-\beta_c}{\gamma_c})+\beta_c[1-\phi((\frac{-\beta_c}{\gamma_c})] E[xc]=E[ReLU(xcpre)]=γcN(γc−βc)+βc[1−ϕ((γc−βc)]
量化训练之可微量化参数—LSQ
普通量化训练
在量化训练中需要加入伪量化节点 (Fake Quantize),这些节点做的事情就是把输入的 float 数据量化一遍后,再反量化回 float,以此来模拟量化误差,同时在反向传播的时候,发挥 STE 的功能,把导数回传到前面的层。
Fake Quantize 的过程可以总结成以下公式 (为了方便讲解 LSQ,这里采用 LSQ 中的对称量化的方式):
v ˉ = r o u n d ( c l i p ( v / s , − Q N , Q p ) ) \bar{v}=round(clip(v/s,-Q_N,Q_p)) vˉ=round(clip(v/s,−QN,Qp))
v ^ = v ˉ × s \hat{v}=\bar{v}\times s v^=vˉ×s
其中, v v v是 float 的输入, v ˉ \bar{v} vˉ是量化后的数据 (仍然使用 float 来存储,但数值由于做了 round 操作,因此是整数),\hat{v}是反量化的结果。 − Q N -Q_N −QN和 Q P Q_P QP分别是量化数值的最小值和最大值 (在对称量化中, − Q N -Q_N −QN和 Q P Q_P QP通常是相等的), s s s是量化参数。
由于 round 操作会带来误差,因此 v ^ \hat{v} v^和 v v v之间存在量化误差,这些误差反应到 loss 上会产生梯度,这样就可以反向传播进行学习。每次更新 weight 后,我们会得到新的 float 的数值范围,然后重新估计量化参数 s s s:
s = ∣ v ∣ m a x Q P s=\frac{|v|_{max}}{Q_P} s=QP∣v∣max
LSQ
LSQ 想做的,就是把这里的 s s s也放到网络的训练当中,而不是通过权重来计算。(反向传播的时候对 s s s求导进行更新)
v ^ = r o u n d ( c l i p ( v / s . − Q N , Q P ) ) × s = { − Q N × s , v / s ≤ − Q N r o u n d ( v / s ) × s , − Q N < v / s < Q P Q P × s , v / s ≥ Q P \hat{v}=round(clip(v/s.-Q_N,Q_P))\times s=\begin{cases} -Q_N\times s,v/s\leq-Q_N\\ round(v/s)\times s, -Q_N
=> ∂ v ^ ∂ s = { − Q N , v / s ≤ − Q N r o u n d ( v / s ) + ∂ r o u n d ( v / s ) ∂ s × s , − Q N < v / s < − Q P Q P , v / s ≥ Q P \frac{\partial\hat{v}}{\partial s}=\begin{cases} -Q_N,v/s\leq-Q_N\\ round(v/s)+\frac{\partial round(v/s)}{\partial s}\times s, -Q_N
r o u n d ( v / s ) round(v/s) round(v/s)这一步的导数可以通过 STE 得到:
∂ r o u n d ( v / s ) ∂ s = { − Q N , v / s ≤ − Q N − v s + r o u n d ( v / s ) , − Q N < v / s < Q P Q P , v / s ≥ Q P \frac{\partial round(v/s)}{\partial s}=\begin{cases} -Q_N,v/s\leq-Q_N\\ -\frac{v}{s}+round(v/s), -Q_N
在LSQ里,量化的时候采用对称量化,将zeropoint=0,初始化scale的方法为 s = 2 < ∣ v ∣ > Q P s=\frac{2<|v|>}{\sqrt{Q_P}} s=QP2<∣v∣>, < ⋅ > <\cdot> <⋅>代表均值。
LSQ+
LSQ+ 的思路和 LSQ 基本一致,就是把零点 (zero point,也叫 offset) 也变成可微参数进行训练,其中只有激活值(输入/输出)有zero point,weight没有zero point,并且参数初始化方法不一样
激活值:
v ˉ = r o u n d ( c l i p ( v − β s , − Q N , Q p ) ) \bar{v}=round(clip(\frac{v-\beta}{s},-Q_N,Q_p)) vˉ=round(clip(sv−β,−QN,Qp))
v ^ = v ˉ × s + β \hat{v}=\bar{v}\times s+\beta v^=