机器学习训练算法十一(模型训练算法-实验)
目录
- 1、测试数据
- 2、数学模型
- 3、梯度下降法
-
- 3.1、数学原理推导
- 3.2、Matlab程序
- 3.3、执行日志
- 3.4、训练结果
- 4、牛顿下降法
-
- 4.1、数学原理推导
- 4.2、Matlab程序
- 4.3、执行日志
- 4.4、训练结果
- 5、高斯牛顿法
-
- 5.1、数学原理推导
- 5.2、Matlab程序
- 5.3、执行日志
- 5.4、训练结果
- 6、列文伯格-马夸尔特法(LM 法)
-
- 6.1、数学原理推导
- 6.2、Matlab程序
- 6.3、执行日志
- 6.4、训练结果
- 7、方法比较
在机器学习中经常用梯度下降法、牛顿下降法、高斯牛顿法、列文伯格-马夸尔特法来训练模型,为了方便理解,本文严谨且详细的阐述了这几个算法的数学推导原理,并且用matlab程序加以实验验证。
1、测试数据
为了方便研究最小二乘法问题,现提供如下车辆时间和行驶距离的观测数据用于讨论和分析。

2、数学模型
令:车辆的初速度 v 0 v_0 v0 、加速度 a a a、时间 t t t、距离 y ^ \hat{y} y^ ,第 i i i组观测值为 ( t i , y ^ i ) (t_i,\hat{y}_i ) (ti,y^i),时间 t t t与距离 y ^ \hat{y} y^满足的数学模型如下:
y ^ = f ( v 0 , a , t ) = 1 2 a t 2 + v 0 t ( 公 式 59 ) \hat{y}=f(v_0,a,t)=\frac{1}{2}at^2+v_0t \qquad (公式59) y^=f(v0,a,t)=21at2+v0t(公式59) min F ( a , v 0 ) = 1 2 ∑ i = 1 10 ( f ( v 0 , a , t i ) − y i ^ ) 2 ( 公 式 60 ) \text{min}F(a,v_0)=\frac{1}{2}\sum_{i=1}^{10} (f(v_0,a,t_i)-\hat{y_i})^2 \qquad (公式60) minF(a,v0)=21i=1∑10(f(v0,a,ti)−yi^)2(公式60)
观察公式 60 发现, y i ^ \hat{y_i} yi^ 和 t i t_i ti 是 常 数 , a a a 和 v 0 v_0 v0 是变量,可知该最小二乘问题是函数 F F F关于 a a a 和 v v v 的最小极值问题。
3、梯度下降法
3.1、数学原理推导
链接地址
3.2、Matlab程序
% ====================================================
% 梯度下降算法
% ====================================================
f = @(args,t)(0.5*args(1)*power(t,2)+args(2)*t); % 定义数学模型
l = @(args,t,y)((f(args,t)-y)); % 定义残差函数
o = @(lv)(0.5.*power(lv,2)); % 定义目标函数
% ======================偏导函数========================
delta = 0.0001;
oj1 = @(args,t,y)((o(l(args+[delta 0]',t,y))-o(l(args,t,y)))./delta); % 关于目标函数第一个参数的一阶偏导函数
oj2 = @(args,t,y)((o(l(args+[0 delta]',t,y))-o(l(args,t,y)))./delta); % 关于目标函数第二个参数的一阶偏导函数
% ======================初始数据========================
t = [0 1 2 3 4 5 6 7 8 9 10]; % 加速度实验的观测值,时间(单位:秒)
y = [0 11.52 26.2 43.5 64.12 87.57 114.12 143.5 176.3 211.5 250.12]; % 加速度实验的观测值,距离(单位:米)
x = [1;1]; % 初始化参数[args(1);args(2)]
goal = 0.0001; % 目标误差
epochs = 10000; % 训练次数
ov = 0; % 初始化目标值
for k=1:epochs
% ======================误差计算========================
tl = l(x,t,y); % 计算残差值
tmp_ov = sum(o(tl)); % 计算最新目标值
tmp_error = abs(tmp_ov-ov); % 目标值的变化
disp([num2str(k),'->目标值:[ ',num2str(tmp_ov),']误差:[',num2str(tmp_error),']']);
ov = tmp_ov; % 更新目标值
if tmp_error*tmp_ov<goal
disp(['训练次数: ',num2str(k),'次...']);
break;
end
% ======================执行训练========================
J=[sum(oj1(x,t,y))
sum(oj2(x,t,y))]; % 雅克比矩阵
% ======================更新参数========================
x=x-0.0001*J;
end
% ========================================================
% 打印训练结果
% ========================================================
disp(['训练后的参数: ',mat2str(x)]);
plot(t,y,'o',min(t):0.001:max(t),f(x,min(t):0.001:max(t)),'-');
3.3、执行日志
1915->目标值:[ 0.17867]误差:[0.00061952]
1916->目标值:[ 0.17805]误差:[0.0006167]
1917->目标值:[ 0.17744]误差:[0.0006139]
1918->目标值:[ 0.17682]误差:[0.00061111]
1919->目标值:[ 0.17622]误差:[0.00060833]
1920->目标值:[ 0.17561]误差:[0.00060557]
1921->目标值:[ 0.17501]误差:[0.00060281]
1922->目标值:[ 0.17441]误差:[0.00060007]
1923->目标值:[ 0.17381]误差:[0.00059735]
1924->目标值:[ 0.17322]误差:[0.00059463]
1925->目标值:[ 0.17262]误差:[0.00059193]
1926->目标值:[ 0.17203]误差:[0.00058924]
1927->目标值:[ 0.17145]误差:[0.00058656]
1928->目标值:[ 0.17086]误差:[0.00058389]
训练次数: 1928次...
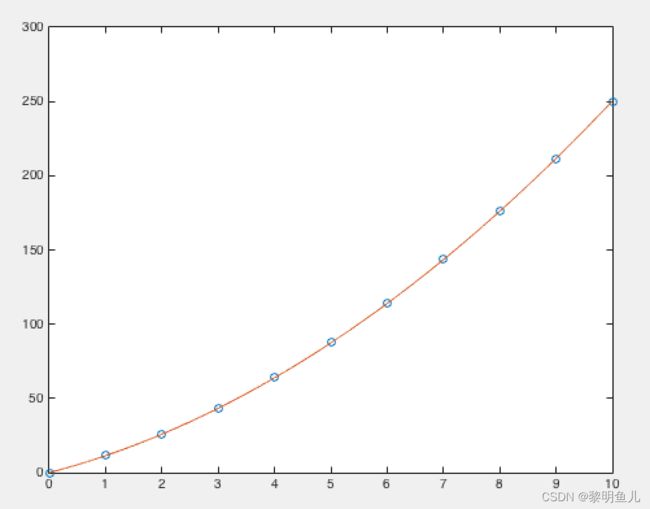
训练后的参数: [3.01986305205636;9.93022105612956]
3.4、训练结果
4、牛顿下降法
4.1、数学原理推导
链接地址
4.2、Matlab程序
% ====================================================
% Newton算法
% ====================================================
f = @(args,t)(0.5*args(1)*power(t,2)+args(2)*t); % 定义数学模型
l = @(args,t,y)((f(args,t)-y)); % 定义残差函数
o = @(lv)(0.5.*power(lv,2)); % 定义目标函数
% ======================偏导函数========================
delta = 0.0001;
oj1 = @(args,t,y)((o(l(args+[delta 0]',t,y))-o(l(args,t,y)))./delta); % 关于目标函数第一个参数的一阶偏导函数
oj2 = @(args,t,y)((o(l(args+[0 delta]',t,y))-o(l(args,t,y)))./delta); % 关于目标函数第二个参数的一阶偏导函数
oh00 = @(args,t,y)((oj1(args+[delta 0]',t,y)-oj1(args,t,y))/delta); % 关于目标函数的(第一个参数,第一个参数)的二阶偏导函数
oh01 = @(args,t,y)((oj1(args+[0 delta]',t,y)-oj1(args,t,y))/delta); % 关于目标函数的(第一个参数,第二个参数)的二阶偏导函数
oh10 = @(args,t,y)((oj2(args+[delta 0]',t,y)-oj2(args,t,y))/delta); % 关于目标函数的(第二个参数,第一个参数)的二阶偏导函数
oh11 = @(args,t,y)((oj2(args+[0 delta]',t,y)-oj2(args,t,y))/delta); % 关于目标函数的(第二个参数,第二个参数)的二阶偏导函数
% ======================初始数据========================
t = [0 1 2 3 4 5 6 7 8 9 10]; % 加速度实验的观测值,时间(单位:秒)
y = [0 11.52 26.2 43.5 64.12 87.57 114.12 143.5 176.3 211.5 250.12]; % 加速度实验的观测值,距离(单位:米)
x = [1;1]; % 初始化参数[args(1);args(2)]
goal = 0.0001; % 目标误差
epochs = 10000; % 训练次数
ov = 0; % 初始化目标值
for k=1:epochs
% ======================误差计算========================
tl = l(x,t,y); % 计算残差值
tmp_ov = sum(o(tl)); % 计算最新目标值
tmp_error = abs(tmp_ov-ov); % 目标值的变化
disp([num2str(k),'->目标值:[ ',num2str(tmp_ov),']误差:[',num2str(tmp_error),']']);
ov = tmp_ov; % 更新目标值
if tmp_error*tmp_ov<goal
disp(['训练次数: ',num2str(k),'次...']);
break;
end
% ======================执行训练========================
H=[sum(oh00(x,t,y)),sum(oh01(x,t,y))
sum(oh10(x,t,y)),sum(oh11(x,t,y))]; % 黑塞矩阵
J=[sum(oj1(x,t,y))
sum(oj2(x,t,y))]; % 雅克比矩阵
% ======================更新参数========================
x=x-inv(H)*J;
end
% ========================================================
% 打印训练结果
% ========================================================
disp(['训练后的参数: ',mat2str(x)]);
plot(t,y,'o',min(t):0.001:max(t),f(x,min(t):0.001:max(t)),'-');
4.3、执行日志
1->目标值:[ 55574.2293]误差:[55574.2293]
2->目标值:[ 0.044544]误差:[55574.1847]
3->目标值:[ 0.04453]误差:[1.4246e-05]
训练次数: 3次...
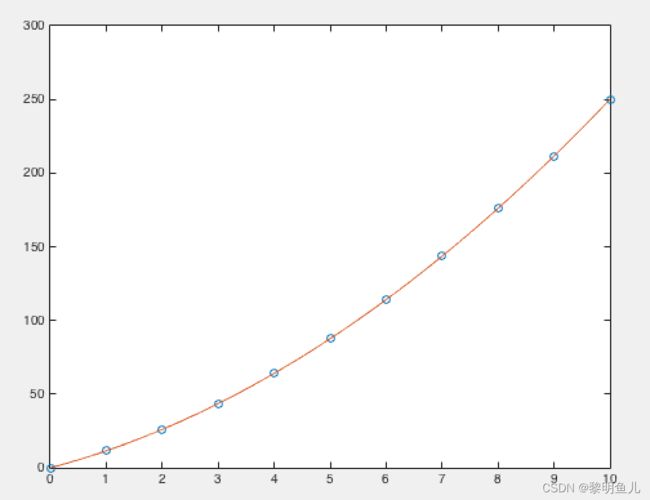
训练后的参数: [2.9945866146396;10.0356844035264]
4.4、训练结果
5、高斯牛顿法
5.1、数学原理推导
链接地址
5.2、Matlab程序
% ====================================================
% Gauss-Newton算法
% ====================================================
f = @(args,t)(0.5*args(1)*power(t,2)+args(2)*t); % 定义数学模型
l = @(args,t,y)((f(args,t)-y)); % 定义残差函数
o = @(lv)(0.5.*power(lv,2)); % 定义目标函数
% ======================偏导函数========================
delta = 0.0001;
j1 = @(args,t,y)((l(args+[delta 0]',t,y)-l(args,t,y))./delta); % 关于残差函数第一个参数的一阶偏导函数
j2 = @(args,t,y)((l(args+[0 delta]',t,y)-l(args,t,y))./delta); % 关于残差函数第二个参数的一阶偏导函数
% ======================初始数据========================
t = [0 1 2 3 4 5 6 7 8 9 10]; % 加速度实验的观测值,时间(单位:秒)
y = [0 11.52 26.2 43.5 64.12 87.57 114.12 143.5 176.3 211.5 250.12]; % 加速度实验的观测值,距离(单位:米)
x = [1;1]; % 初始化参数[args(1);args(2)]
goal = 0.0001; % 目标误差
epochs = 10000; % 训练次数
ov = 0; % 初始化目标值
for k=1:epochs
% ======================误差计算========================
tl = l(x,t,y); % 计算残差值
tmp_ov = sum(o(tl)); % 计算最新目标值
tmp_error = abs(tmp_ov-ov); % 目标值的变化
disp([num2str(k),'->目标值:[ ',num2str(tmp_ov),']误差:[',num2str(tmp_error),']']);
ov = tmp_ov; % 更新目标值
if tmp_error*tmp_ov<goal
disp(['训练次数: ',num2str(k),'次...']);
break;
end
% ======================执行训练========================
tmp_j1 = j1(x,t,y); % 关于第一个参数的一阶偏导函数的值
tmp_j2 = j2(x,t,y); % 关于第二个参数的一阶偏导函数的值
H=[sum(tmp_j1.*tmp_j1),sum(tmp_j1.*tmp_j2)
sum(tmp_j2.*tmp_j1),sum(tmp_j2.*tmp_j2)]; % 近似黑塞矩阵
J=[sum(tl.*tmp_j1)
sum(tl.*tmp_j2)]; % 近似雅克比矩阵
% ======================更新参数========================
x=x-inv(H)*J;
end
% ========================================================
% 打印训练结果
% ========================================================
disp(['训练后的参数: ',mat2str(x)]);
plot(t,y,'o',min(t):0.001:max(t),f(x,min(t):0.001:max(t)),'-');
5.3、执行日志
1->目标值:[ 55574.2293]误差:[55574.2293]
2->目标值:[ 0.044455]误差:[55574.1848]
3->目标值:[ 0.044455]误差:[1.4919e-15]
训练次数: 3次...
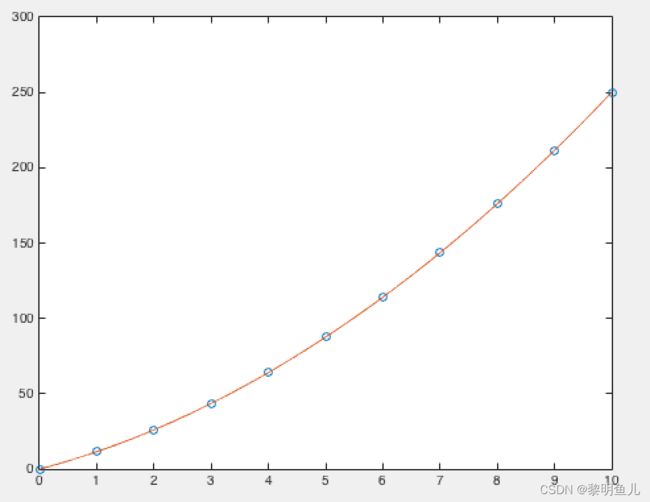
训练后的参数: [2.9952026286965;10.0333143483027]
5.4、训练结果

6、列文伯格-马夸尔特法(LM 法)
6.1、数学原理推导
链接地址
6.2、Matlab程序
% ====================================================
% LM算法
% ====================================================
f = @(args,t)(0.5*args(1)*power(t,2)+args(2)*t); % 定义数学模型
l = @(args,t,y)((f(args,t)-y)); % 定义残差函数
o = @(lv)(0.5.*power(lv,2)); % 定义目标函数
% ======================偏导函数========================
delta = 0.0001;
j1 = @(args,t,y)((l(args+[delta 0]',t,y)-l(args,t,y))./delta); % 关于残差函数第一个参数的一阶偏导函数
j2 = @(args,t,y)((l(args+[0 delta]',t,y)-l(args,t,y))./delta); % 关于残差函数第二个参数的一阶偏导函数
% ======================初始数据========================
t = [0 1 2 3 4 5 6 7 8 9 10]; % 加速度实验的观测值,时间(单位:秒)
y = [0 11.52 26.2 43.5 64.12 87.57 114.12 143.5 176.3 211.5 250.12]; % 加速度实验的观测值,距离(单位:米)
x = [1;1]; % 初始化参数[args(1);args(2)]
goal = 0.0001; % 目标误差
epochs = 10000; % 训练次数
ov = 0; % 初始化目标值
for k=1:epochs
% ======================误差计算========================
tl = l(x,t,y); % 计算残差值
tmp_ov = sum(o(tl)); % 计算最新目标值
tmp_error = abs(tmp_ov-ov); % 目标值的变化
disp([num2str(k),'->目标值:[ ',num2str(tmp_ov),']误差:[',num2str(tmp_error),']']);
ov = tmp_ov; % 更新目标值
if tmp_error*tmp_ov<goal
disp(['训练次数: ',num2str(k),'次...']);
break;
end
% ======================执行训练========================
tmp_j1 = j1(x,t,y); % 关于第一个参数的一阶偏导函数的值
tmp_j2 = j2(x,t,y); % 关于第二个参数的一阶偏导函数的值
H=[sum(tmp_j1.*tmp_j1),sum(tmp_j1.*tmp_j2)
sum(tmp_j2.*tmp_j1),sum(tmp_j2.*tmp_j2)]; % 近似黑塞矩阵
J=[sum(tl.*tmp_j1)
sum(tl.*tmp_j2)]; % 近似雅克比矩阵
% ======================计算值λ========================
if k==1
% 初始化值λ
lambda = 0.000001*max(diag(H));
v=2;
else
% 更新值λ
tmp_delta = delta*ones(size(J));
beta = (tmp_ov-o(l(x+tmp_delta,t,y)))/(tmp_ov-(tmp_ov+J'*tmp_delta+0.5.*tmp_delta'*H*tmp_delta));
if beta>0
lambda = lambda * max([1/3;1-power(2*beta-1,3)]);
v = 2;
else
lambda = lambda*v;
v = 2*v;
end
end
disp(['-->值λ: ',mat2str(lambda)]);
% ======================更新参数========================
x=x-inv(H+lambda*eye(size(H)))*J;
end
% ========================================================
% 打印训练结果
% ========================================================
disp(['训练后的参数: ',mat2str(x)]);
plot(t,y,'o',min(t):0.001:max(t),f(x,min(t):0.001:max(t)),'-');
6.3、执行日志
1->目标值:[ 55574.2293]误差:[55574.2293]
-->值λ: 0.00633324999999457
2->目标值:[ 0.044517]误差:[55574.1847]
-->值λ: 0.0126664999999891
3->目标值:[ 0.044455]误差:[6.1711e-05]
训练次数: 3次...
训练后的参数: [2.99520293572588;10.033313067223]
6.4、训练结果
7、方法比较