强化深度学习中利用时序差分法确定扫地机器人问题的最优解(附源码 超详细必看)
运行有问题或需要源码请点赞关注收藏后评论区留下QQ~~~
一、时序差分预测
时序差分法(TD)TD方法将DP的自举性和MC的采样性相结合,学习时间间隔产生的差分数据,并通过迭代更新来求解未知环境模型的MDP问题
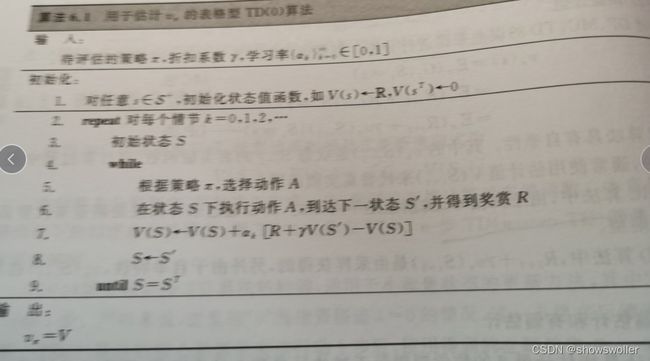
在时序差分预测中,每前进一步或N步,就可以直接计算状态值函数,接下来我们讨论单步情况TD(0)下的时序差分算法
TD(0)算法适用于小批量状态的更新方法,其中0表示向前行动一步,它的核心思想是向前行动一步后,使用得到的立即奖赏和下一状态的状态值函数的估计值来进行更新,这也是TD0被称为单步TD算法的原因
表格型TD(0)算法如下
二、时序差分控制
TD控制算法和MC控制算法一样,都遵循GPI,且评估的目标都是状态-动作对的最优动作值函数,为了平衡探索与利用,TD控制算法分为基于策略迭代的同策略Sarsa算法和基于值迭代的异策略Q-Learning算法,它们两个算法都属于TD(0)算法 它们的收敛性同样遵循MC增量式中的随机近似条件
三、扫地机器人实战
使用Sarsa算法解决确定环境扫地机器人的问题,将动作值函数设置为24×4的二维数组,这样当Sarsa算法使用具有贪心性质的策略时也会逐渐变得贪心。
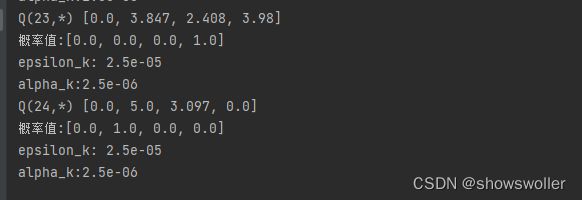
运行结果可以看到,当迭代到20000个情节时,迭代已经收敛。
扫地机器人环境的搭建以及背景条件可参考如下链接
扫地机器人简介
开始迭代时
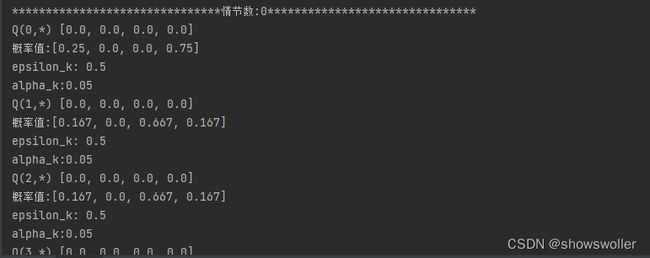
迭代完成后输出如下
代码如下
from 扫地机器人gym环境 import GridWorldEnv
import numpy as np
np.random.seed(1)
env = GridWorldEnv()
#有效动作空间
def vilid_action_space(s):
action_sacpe = []
if s % 5 != 0:#左
action_sacpe.append(0)
if s % 5 != 4:#右
action_sacpe.append(1)
if s <= 19:#上
action_sacpe.append(2)
if s >= 5:#下
action_sacpe.append(3)
return action_sacpe
def policy_epsilon_greedy(s, Q, epsilon):#ε贪心策略
Q_s = Q[s]
action = vilid_action_space(s)
if np.random.rand() < epsilon:
a = np.random.choice(action)
else:
index_a = np.argmax([Q_s[i] for i in action])
a = action[index_a]
return a
def print_dd(s, a, next_s, next_a, print_len, episode_i, Q,e_k,a_k):
for i in range(1):
if episode_i == int(print_len * (0.1 * i + 1)):
if s == 21 and a == 1 and next_s == 22 and next_a == 1:
print("*********************************单步的计算过程**************************************")
print("alpha:"+str(a_k))
print("epsilon:"+str(e_k))
print("state:" + str(int(print_len * (0.1 * i + 1))))
print(Q[s][a])
print(Q[next_s][a])
print("update:"+str(Q[s, a] + a_k * (0.8 * Q[next_s, next_a] - Q[s, a])))
print("************************************************************************************")
def trans(Q_S):#因为环境中动作顺序是左右上下,文章建模的动作顺序是上下左右,所以转换为文章中的顺序(上下左右)进行输出,并保存3位小数
new_Q = []
new_Q.append(round(Q_S[2],3))
new_Q.append(round(Q_S[3],3))
new_Q.append(round(Q_S[0],3))
new_Q.append(round(Q_S[1],3))
return new_Q
def print_ff(list_q, Q, episode_i,epsilon_k,alpha_k):
list_s = range(0,25)
for em in list_q:
if em == episode_i:
print("*******************************情节数:%s*******************************"%(str(em)))
for state in list_s:
print("Q(%d,*) "%(state) + str(trans(Q[state])))
action = vilid_action_space(state)
len_a = len(action)
e_p = epsilon_k / float(len_a)
prob = []
index_a = np.argmax([Q[state][i] for i in action])
for i in range(4):#计算epsilon
if i not in action:
prob.append(0.0)
else:
if i == action[index_a]:
prob.append(1 - epsilon_k + e_p)
else:
prob.append(e_p)
print('概率值:' + str(trans(prob)))
print("epsilon_k: {}".format(epsilon_k))
print("alpha_k:{}".format(alpha_k))
def Attenuation(epsilon,alpha,episode_sum,episode):#epsilon和alpha衰减函数
epsilon = (float(episode_sum) - float(episode)) / float(episode_sum) * epsilon
alpha = (float(episode_sum) - float(episode)) / float(episode_sum) * alpha
return epsilon, alpha
tate
epsilon_k, alpha_k = Attenuation(epsilon,alpha,episode_num,episode_i)
A = policy_epsilon_greedy(S, Q, epsilon_k)
done = False
print_ff(list_q,Q,episode_i,epsilon_k,alpha_k)
while not done:
next_S, R, done, _ = env.step(A)
next_A = policy_epsilon_greedy(next_S, Q, epsilon_k)
print_dd(S,A,next_S,next_A,3000,episode_i,Q,epsilon_k,alpha_k)
Q[S, A] = Q[S,
创作不易 觉得有帮助请点赞关注收藏~~~