GPS & Lidar & IMU 融合定位与建图_理论学习1
Localization & Mapping
参考:博文:Lidar 数据处理- [ADS]
GPS 定位
定位技术分类:GPS绝对定位,相对定位 ,融合定位
问题: 传统的GPS定位精度只有3-7米 ,我国城市主干道单一车道宽一般是3.75米 ,也就是说GPS无法做到车道线级定位。在城市道路或峡谷中,精度会进一步下降。
解决方案①绝对定位,常用 RTK技术(Real Time Kinematic (RTK)-可以全天候提供厘米级别的定位。--缺陷:RTK缺点也是很明显的。
RTK确定整周模糊度的可靠性为95~99%,在稳定性方面不及全站仪,这是由于RTK较容易受卫星状况、天气状况、数据链传输状况影响的缘故。首先,GPS在中、低纬度地区每天总有两次盲区(中国一般都是在下午),每次20~30分钟,盲区时卫星几何图形结构强度低,RTK测量很难得到固定解。其次,白天中午,受电离层干扰大,共用卫星数少,因而初始化时间长甚至不能初始化,也就无法进行测量。根据实际经验,每天中午12点~13点,RTK测量很难得到固定解。
再次,依赖GPS信号,在隧道内和高楼密集区无法使用。 适合开旷的路面,不适合建筑物密集的城市中心,或地下车库
②相对定位:常用的有 IMU -(SINS系统,就是Strap-down InertialNavigation。捷联惯导系统),基于IMU 或者视觉里程计(VO)、光电编码器(机器人车辆上用的多一些)-通过积分获得自身的轨迹-也叫航迹推算方法,短距离精度高,长距离,由于积分产生的误差太大。
③ Lidar 测量特点: 恶劣天气测量差(雨雪),开旷的路面 不行,(3D 特征信息丰富的场景,易于测量)-适合建筑物密集的城市中心,或地下车库
所以: 绝对定位方案不能完全依赖GPS-RTK 方法。,发现Lidar和GPS ,IMU 三者可以互补。隧道中GPS 丢失,INS预测,lidar更新,精度也很高,出隧道,GPS恢复,三者可以再次各发所长。因此推荐传感器融合定位的方法
参考:https://www.cnblogs.com/Crise2018/p/8205662.html
百度Apollo 定位系统
参考:学术论文“Robust and Precise VehicleLocalization based on Multi-sensor Fusion in Diverse City Scenes
使用了激光雷达、RTK与IMU融合的方案,多种传感器融合加上一个误差状态卡尔曼滤波器使得定位精度可以达到RMS 平均值5-10厘米(x,y位置),且具备高可靠性和鲁棒性,达到了全球顶级水平。市区允许最高时速超过每小时60公里。
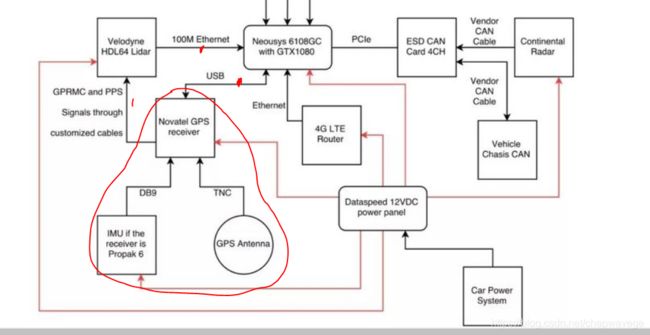
IMU +GPS 收发器+天线,构成惯性导航系统,通过USB 传输数据给processor, 同时,GPS 模块输出触发信号给Lidar模块,做信号同步, 最后做数据融合。
数据频率: LIDAR 100ms, GPS 200ms TBD ?, IMU 5ms
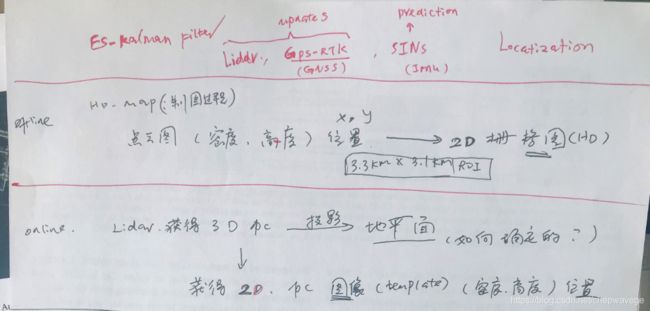
SINS使用IMU测量得到的加速度和角速度积分得到位置、速度、姿态等(误差较大,需要更新部分更新,修正),在卡尔曼滤波器的传播阶段作为预测模型;相应地,ES(error state)-KF卡尔曼滤波器会对IMU的加速度和角速度进行矫正,位置、速度和姿态等误差也反馈给SINS。RTK定位和激光雷达点云定位结果作为卡尔曼滤波器的测量更新。

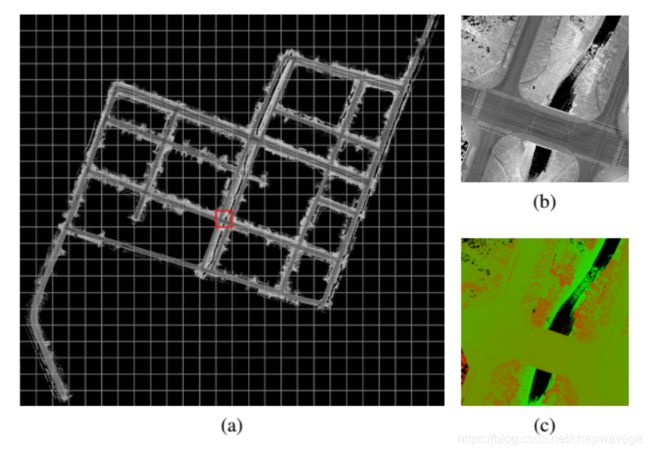
上图为百度的激光雷达点云定位地图。
输入的先验地图:(HD-map)--首先要提前制作一幅无人车将要行驶地区的激光雷达点云定位地图,包含有激光雷达强度成像图和高度分布图,这张图通常是地图厂家用测绘级激光雷达完成的。目前全球绝大多数厂家包括Waymo、福特、通用等都是如此。b为激光雷达反射强度成像图,c为高度分布图。这张图覆盖范围3.3*3.1平方公里。
激光点云定位算法描述如下:TBD!

表面上看高精度定位很复杂,实际计算中,耗费的运算资源并不算多,基于激光雷达的运算量远低于基于图像的运算量
百度无人车定位团队的一篇关于多传感器融合定位的学术论文“Robust and Precise VehicleLocalization based on Multi-sensor Fusion in Diverse City Scenes”已被机器人顶级会议ICRA 2018录用,初稿可从arXiv上下载。
论文介绍的方案:
不是仅仅依靠激光雷达的强度或三维几何,我们创新地使用激光雷达强度和高度线索来显著改善定位系统准确性和鲁棒性
个人理解:

注意匹配这一步,目前已经用CNN 代替了。具体TBD !
