SESS: Self-Ensembling Semi-Supervised 3D Object Detection论文阅读及理解
SESS: Self-Ensembling Semi-Supervised 3D Object Detection
Abstract
3d检测通常以来目标的标签和注释,然而获得这些注释是十分困难的。
SESS一种自集成的半监督三维目标检测框架。
设计了一种扰动方案,加强对未标记数据和新的为可见数据的泛化。
提出三种一致损失(consistency loss),加强两组预测三维目标提议之间的一致性。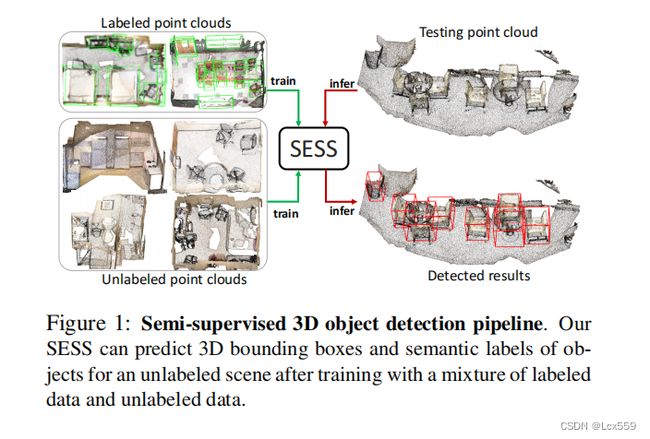
半监督学习的方式,通过一个混合标签的数据和为标注的数据进行训练。
Introduction
半监督学习只需要很小一部分的标签,很大程度的减少了收集大量数据标签的问题。
3d目标检测任务中完全去除标签是不太可能的,因为3d点云的稀疏性和无序性,且物体容易被阻挡。
SESS通过包含了教师和学生网络的教师平均范式3d目标检测网络进行半监督学习。教师网络指导学说网络在面对不同的扰动下保持相同的预测。在训练结束时,我们希望能够让教师网络和学生网络提出的检测提案是一致的。
提出三种一致性损失,分别是提案的中心点、类别以及大小(bounding box)。
Our Method
Problem Definition
在半监督学习的设定中,输入为N个训练样本,其中包括了Nl个有标签的点云PL,
和u个未标签的点云
![]() 表示点云的表示场景,具有n个点的3为特征向量。
表示点云的表示场景,具有n个点的3为特征向量。
![]() 以标签点云的真实标签(ground truth)。
以标签点云的真实标签(ground truth)。
每个对象都由一个语义类s表示(占预定义类的1/1000).
bbx由中心点坐标![]() 和他的大小
和他的大小![]() 和沿直立轴的转角θ表示表示。
和沿直立轴的转角θ表示表示。
SESS Architecture
SESS总体架构如图: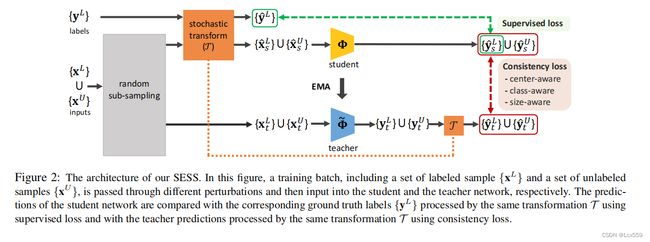
将两个有标签和无标签的点云作为输入
Bl和Bu表示一次采样中标签和未标签样本。首先随机从点云中采样M个点,得到两个点集,将第一个点集Xs通过一个随机的变换矩阵T进行扰动,得到X^s,另一个点集Xt直接送至教师网络,得到的预测Yt也通过同样的随机变换矩阵进行扰动得到Y^t。
对于Y^t中的每个提案,通过欧几里得距离从学生网络预测的Y^s中找到最接近的提案。每个对齐的提案的误差由上述的三个一直损失计算得到。
同时XLs对应的ground truth YL经过同样的变换矩阵T,得到的变换矩阵Y^L于学生网络的输出Y^LS通过监督损失进行比较。
最后,学生网络的参数Φ通过梯度下降进行更新,而将学生网络的参数以指数平均的方式对教师网络的参数Φ~进行平均:

α是一个超参数,控制教师网络从学生网络中获得多少信息。
Perturbation Scheme
数据扰动和数据扩张对于自集成方案有着很大的作用。
Random Sub-sampling
对学生网络和教师网络的部分都采用了随机子采样作为扰动方案。
Stochastic Transform
对学生网络子采样的点集进行翻转、缩放以及旋转。具体来说,将变换作设置为一个随机的变量: Fx表示沿x轴的随机翻转,Fy表示沿y轴的随机翻转,Fx的值取决于:
Fx表示沿x轴的随机翻转,Fy表示沿y轴的随机翻转,Fx的值取决于:

从[0,1]中随机取值,Fy的值类似获得。
R表示绕直立轴的旋转矩阵,w从[-θ,θ]中随机采样:
S从[a,b]中均值采样用来表示缩放。
最终产生的矩阵Ti用于令输入学生网络的点云Xs进行变换,![]() 注意,ground truth label yLi在用于计算监督损失之前也需要通过相同的Ti矩阵进行变换。教师网络输出的预测yt也需要通过相同的矩阵进行变换。
注意,ground truth label yLi在用于计算监督损失之前也需要通过相同的Ti矩阵进行变换。教师网络输出的预测yt也需要通过相同的矩阵进行变换。
Consistency Loss
两组三维对象提案的一致性是不能直接计算的。
将来自学生网络和教师网络的提案进行配对,然后使用三个一致性损失进行计算。
![]() 作为学生网络bounding box的预测中心,
作为学生网络bounding box的预测中心, 作为变换后的教师网络预测的中心。对于教师网络预测的每个中心点c^t和学生网络预测的中心点通过最小的欧氏距离进行对其。进一步使用
作为变换后的教师网络预测的中心。对于教师网络预测的每个中心点c^t和学生网络预测的中心点通过最小的欧氏距离进行对其。进一步使用![]() 表示学生网络预测的中心点和教师网络预测中心点对其的点,表示为:
表示学生网络预测的中心点和教师网络预测中心点对其的点,表示为:
同样收集教师网络与学生网络以欧氏距离判断的最接近的点 与学生网络的预测中心点
与学生网络的预测中心点![]() 进行配对。
进行配对。
若教师网络和学生网络预测的bounding box是一致,各对应元素的距离和应该为0
中心一致损失:
在集成学习中,教师网络生成学习目标给学生网络进行学习,分别用![]() 和
和 表示学生网络和教师网络预测目标类别的可能性。对应的
表示学生网络和教师网络预测目标类别的可能性。对应的 基于最小中心距离很容易得到,通过
基于最小中心距离很容易得到,通过![]() 之间的KL散度来定义类感知的一致性损失:
之间的KL散度来定义类感知的一致性损失:

对于学生网络和教师网络对于bounding box大小的预测表示为:
利用最小中心距离计算得到对应的![]() ,
,![]() 之间的均方差误差可以表示为:
之间的均方差误差可以表示为:
总的一致性损失可以由这三个损失加权表示得到: