【毕业设计】基于STM32的智能药箱系统设计与实现 - 物联网 单片机
文章目录
- 1 简介
- 2 绪论
-
- 2.1 课题背景
- 2.2 实现功能
- 3 系统设计
-
- 3.1 系统架构
- 3.2 硬件设计
-
- 3.2.1 wifi电路设计
- 3.2.2 其他电路设计
- 3.3 软件设计
-
- 3.3.1 软件工作流程
- 3.3.2 闹铃提醒程序设计
- 3.3.3 液晶显示程序设计
- 3.3.4 信息存储程序设计
- 3.3.5 报警电路程序设计
- 3.4 部分实现代码
- 4 最后
1 简介
Hi,大家好,这里是丹成学长,今天向大家介绍一个学长做的单片机项目
基于STM32的智能药箱系统设计与实现
大家可用于 课程设计 或 毕业设计
单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052
2 绪论
2.1 课题背景
照顾老人, 特别是提醒老人准时吃药已经成为了一个社会关心的问题。长期记录吃药种类、 吃药时间能为分析老人的病理提供有力的依据。
基于目 前市场需求, 学长设计了一款基于 STM32F103 并结合网络来提醒老人按时吃药的系统。
整个智能药箱系统分为智能药箱端与远程服务器端两个部分, 智能药箱端用于提醒, 服务器端用于记录监督
2.2 实现功能
整个系统经过多次测试和应用, 各功能模块都可以正常运行, 符合设计要求。 具有的功
能包括: 从服务器端的数据库中实时获取药物信息, 闹钟信息等并存储。 播放音频文件提醒老人用药, 在液晶屏上提示吃药信息, 老人可以根据显示信息正确用药。 智能药箱端能记录药箱中每种药的数目, 并进行药量检测, 在药量不足时发出提醒, 提示用户配药。 另外还可以对老人取药动作进行记录, 将取药状态通过互联网传输给服务器监控端, 为以后看病做依据。 另外, 智能药箱端通过程序界面方便的配置智能药箱内部的网络信息,包括服务器地址、端口、 网关等。
它的主要功能分为下面几个部分:
-
- 提醒功能
-
- 取药监督
-
- 记录吃药时间
-
- 对老人是否吃药及时做出反应
-
- 显示吃药信息
服务器中记录下的取药时间可以作为以后看病的有力依据, 使医生能够准确对老人的病情做出判断, 减少一定的医学失误。
尽管智能药箱的发展并没有早期预期的那么快。 但是, 它的应用价值极高, 针对性也很
强, 可以有效的管理老年人用药, 减少儿女对父母吃药问题上的担心。 所以, 随着科技的发展, 智能药箱的普及将指日可待。
3 系统设计
3.1 系统架构

设计上必须从上图架构出发, 从上图可以得出智能药箱系统的总体功能:
- a) 闹钟提醒吃药
- b) 液晶显示吃药信息
- c) 实时采集取药状态
- d) 存储从服务器端获取的信息
- e) 配置界面配置药箱端的网络参数
- f) 实时检测药数量, 不足提醒用户
- g) 增加服务器端, 记录药物信息, 闹钟, 取状态药等信息
3.2 硬件设计
3.2.1 wifi电路设计
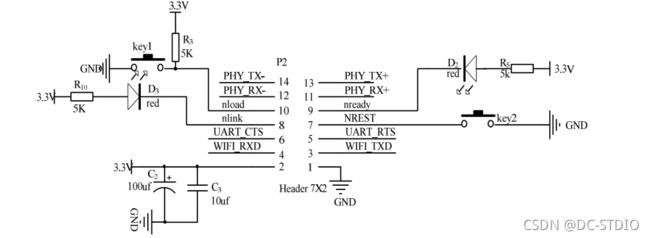
3.2.2 其他电路设计
略,内容相对冗余,也不是本文介绍的重点,需要详细设计方案,可以在文章末尾联系学长。
3.3 软件设计
3.3.1 软件工作流程
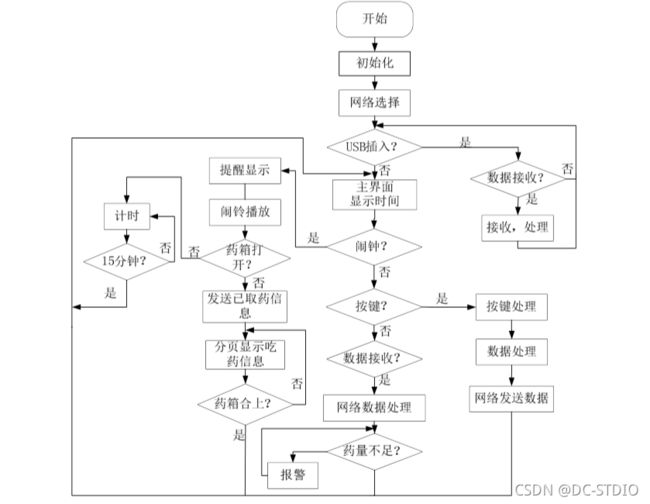
程序包括模块的驱动与功能操作, 驱动主要是硬件的驱动, 每个模块只有在硬件驱动成功后, 才能执行其余功能。
3.3.2 闹铃提醒程序设计
下图是闹铃提醒的程序流程图, STM32 从 TF 卡中读取 512 字节数据, 按顺序传输给VS1003 进行音频转换和播放。 然后, 依次读取下一个扇区的 512 个字节进行播放。 如果播放过程中检测到药箱打开, 则停止闹铃并退出。

3.3.3 液晶显示程序设计
下图是闹铃提醒的程序流程图, STM32 从 TF 卡中读取 512 字节数据, 按顺序传输给VS1003 进行音频转换和播放。 然后, 依次读取下一个扇区的 512 个字节进行播放。 如果播放过程中检测到药箱打开, 则停止闹铃并退出。

3.3.4 信息存储程序设计
存储信息的过程如下:
当智能药箱接收网络参数, 药物信息时, 首先对数据按协议正确处理, 然后向 24C08 发送存储地址, 如果地址上已经有数据, 则读取。 然后将地址上的数据清空, 将刚才接收并处理的信息与从存储芯片读取的数据进行统一处理, 保留不变的, 修改已改变的数据, 再存入地址中。 如果需要读取存储芯片上的数据, 则向 24C08 发送地址读取数据即可, 程序流程图如下图所示。

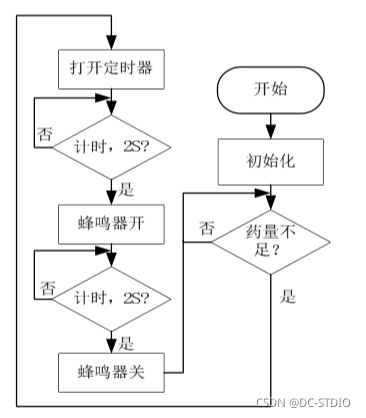
3.3.5 报警电路程序设计
智能药箱与服务器之间每半小时需要药数目的校正, 以便两者之间可以同步。 当药箱内部药量不足时, 就会触发蜂鸣器以示提醒。 蜂鸣器采用是有源蜂鸣器, 接通电流就会发声,整个报警的程序流程图如下图所示。
3.4 部分实现代码
#include 作品展示:

单片机-嵌入式毕设选题大全及项目分享:
https://blog.csdn.net/m0_71572576/article/details/125409052