【操作系统】磁盘调度算法(FCFS、SSTF、SCAN 和 C-LOOK 调度策略)
Lab Week 18 实验报告
实验内容:硬盘调度
- 编写一个 C 程序模拟实现课件 Lecture25 中的硬盘磁头调度算法,包括
- FCFS、SSTF、SCAN 和 C-LOOK 调度策略。
- 固定一个硬盘柱面数;
- 输入一批随机的硬盘柱面请求序列,计算各个调度策略下的磁头移动平均总距离 (假设磁头运动是理想匀速的,可以把移动距离看作是移动时间,将总时间除以请求数得到平均响应时间)。
- 分析上述实验结果。
I. 硬盘磁头调度算法
由于内存通常太小而且不能永久保存所有数据和程序,因此计算机系统必须提供外存来备份内存。现代计算机系统采用磁盘(硬盘)作为信息(程序与数据)的主要在线存储介质。换句话说,硬盘或磁盘为现代计算机系统提供大量外存。

磁盘是表面涂有磁性物质的物理盘片,通过磁头(导体线圈)从磁盘存取数据,在读/写期间,磁头固定,磁盘在下面高速旋转。磁盘盘面上的数据存储在一组同心圆中,称为磁道。每个磁道和磁头一样宽,一个盘面上有上千个磁道。磁道又分为几百个扇区,每个扇区固定存储大小,因此越往内的扇区密度越高。
磁盘地址由(柱面号,盘面号,扇区号)表示。
操作系统的职责之一是有效使用硬件。对于磁盘驱动器,满足这个要求具有较快的访问速度和较宽的磁盘带宽。
对于磁盘,访问时间包括两个主要部分:
- 寻道时间:是磁臂移动磁头到包含目标扇区的柱面的时间;
- 旋转延迟:是磁盘旋转目标扇区到磁头下的额外时间;
在这部分,我们针对寻道时间来进行优化,通过不同的磁头调度算法,分析优化的情况。
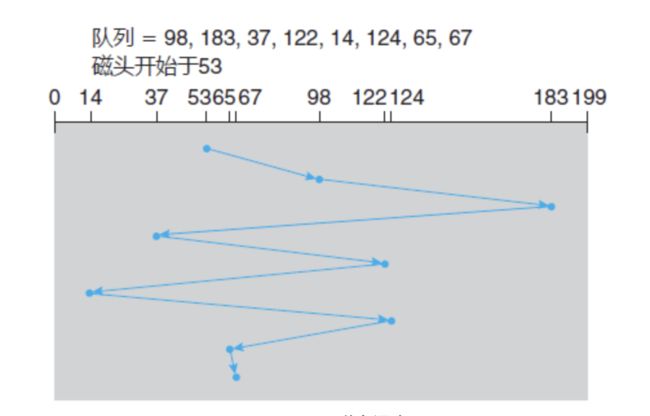
1. 先来先服务(First Come First Served, FCFS)算法
FCFS算法根据进程请求访问磁盘的先后顺序进行调度,这是最简单的磁盘调度算法,虽然这种算法比较公平,但是它通常并不提供最快的服务。
实现代码:
//设置磁道请求
void set_request(int *cylinders, int *request, int req_num){
for(int i = 0; i < req_num; i++){
int req_id = request[i];
cylinders[req_id]++; //对应的磁道请求数加1
}
}
代码说明:
该函数对磁道表cylinders的请求进行设置,如果该磁道存在请求,那么将其对应的表项值加一,以此类推;
void FCFS(int head, int *request, int *cylinders, int req_num){
printf("===============FCFS=============\n");
int move_sum = 0;
memset(cylinders, 0, CYLINDER_MAX * sizeof(int));
set_request(cylinders, request, req_num);//设置磁道请求
printf("Head location: %d\n", head);
printf("Processing sequence: ");
printf("%d ", head);
for(int i = 0; i < req_num; i++){
int req_id = request[i];
printf("%d ", req_id);
cylinders[req_id]--;
move_sum += abs(head - req_id); //计算移动距离
head = req_id; //磁头移动
}
printf("\nAverage total distance of head movement = %d\n", move_sum);
printf("Average average response time = %f\n\n", (double)(move_sum/req_num));
}
代码说明:
根据FCFS调度算法的原理,直接对请求序列从头到尾进行处理,并且计算磁头的移动距离和平均响应时间;
实验结果:
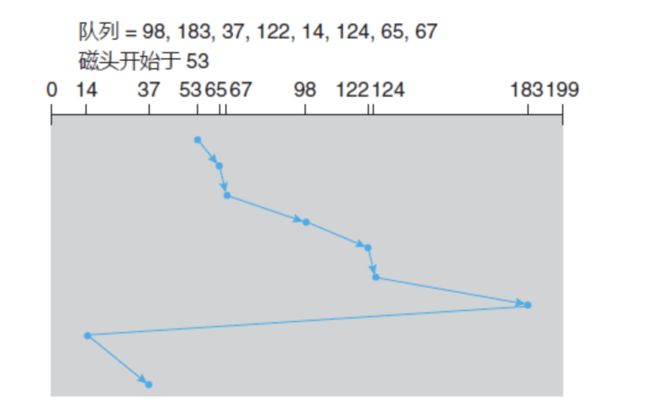
the queue with requests for cylinders: 98 183 37 122 14 124 65 67
the head's position of cylinder: 53

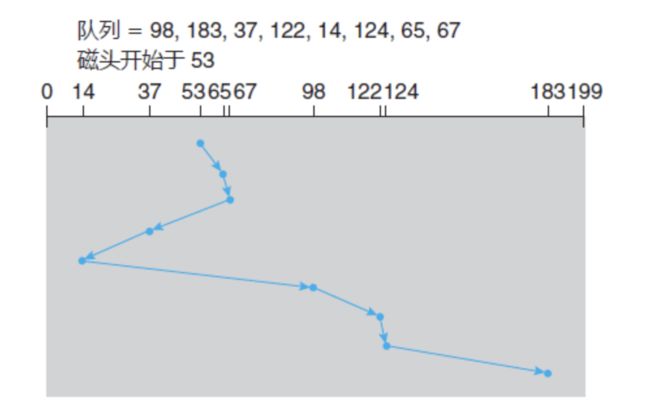
2. 最短寻道时间优先(Shortest Seek Time First, SSTF)算法
SSTF总是选择离当前磁头所在磁道最近的磁道,以便每次寻找的时间最短,在移动磁头到别处以便处理其他请求之前,处理靠近当前磁头位置的所有请求可能较为合理。
这种算法的缺陷是,若某磁头附近频繁地被添加请求,那么磁头会长时间在这附近工作,导致更远的磁道无期限地延迟,即“饥饿”。
实现代码:
void SSTF(int head, int *request, int *cylinders, int req_num){
printf("===============SSTF=============\n");
int move_sum = 0;
int dis_list[req_num];
int dis_idx[req_num];
int init_head = head;
for(int i = 0; i < req_num; i++){
int dis = abs(head - request[i]);
dis_list[i] = dis;
dis_idx[i] = i;
}
memset(cylinders, 0, CYLINDER_MAX * sizeof(int));
set_request(cylinders, request, req_num);
printf("Head location: %d\n", head);
//对dis_list从小到大进行排序,作为磁道请求序列
for(int i = 0; i < req_num - 1; i++){
for(int j = 0; j < req_num - i - 1; j++){
if(dis_list[j] > dis_list[j+1]){
int temp = dis_list[j];
int temp_idx = dis_idx[j];
dis_list[j] = dis_list[j+1];
dis_idx[j] = dis_idx[j+1];
dis_list[j+1] = temp;
dis_idx[j+1] = temp_idx;
}
}
}
printf("Processing sequence: ");
printf("%d ", head);
for(int i = 0; i < req_num; i++){
int req_id = request[dis_idx[i]];
printf("%d ", req_id);
cylinders[req_id]--;
move_sum += abs(head - req_id);
head = req_id;
}
printf("\nAverage total distance of head movement = %d\n", move_sum);
printf("Average average response time = %f\n\n", (double)(move_sum/req_num));
}
代码说明:
根据SSTF算法的原理,需要优先处理离磁头最近的请求,因此利用冒泡排序对磁头与请求的距离从小到大进行排序,距离记录在dis_list中,对应的请求的下标记录在dis_idx中,方便在排序之后取出请求的磁道数。
实验结果:
the queue with requests for cylinders: 98 183 37 122 14 124 65 67
the head's position of cylinder: 53
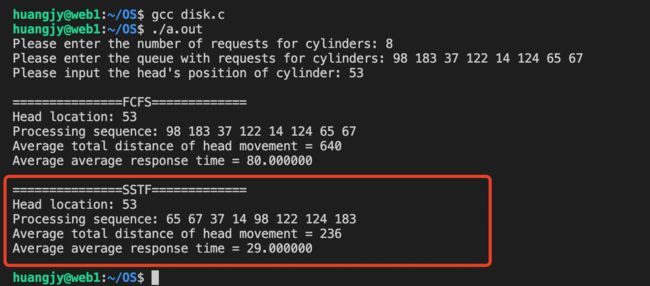
在SSTF调度策略中,输入8个磁道请求序列,指定磁头初始位置为53,最后得到磁头平均移动总距离为236,平均响应时间为29;
与FCFS调度策略相比,SSTF的平均移动总距离和平均响应时间均更优;
3. SCAN
对于扫描算法,磁臂从磁盘的一端开始,向另一端移动;在移过每个柱面时,处理请求。当到达磁盘的另一端时,磁头移动方向反转,并继续处理。磁头连续来回扫描磁盘。SCAN 算法有时称为电梯算法,因为磁头的行为就像大楼里面的电梯,先处理所有向上的请求,然后再处理相反方向的请求。
实现代码:
void SCAN(int head, int *request, int *cylinders, int req_num, int dir){
if(dir != 1 && dir != 0){
printf("Direction Error\n");
return;
}
printf("===============SCAN=============\n");
int move_sum = 0;
int dis_list[req_num];
int dis_idx[req_num];
int pre_head = head;
for(int i = 0; i < req_num; i++){
int dis = abs(head - request[i]);
dis_list[i] = dis;
dis_idx[i] = i;
}
memset(cylinders, 0, CYLINDER_MAX * sizeof(int));
set_request(cylinders, request, req_num);
printf("Head location: %d\n", head);
printf("Head moving sequence: ");
printf("%d ", head);
while(head >= 0 && head < CYLINDER_MAX){
while(cylinders[head] > 0){
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
cylinders[head]--;
}
if(dir == 0) head--;
else head++;
}
if(head == -1) head++;
else if(head == CYLINDER_MAX) head--;
//移动到磁道尽头后, pre_head修改为head的位置,以便磁头换方向移动
if(pre_head != head){
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
}
if(dir == 1) dir = 0;
else dir = 1;
//反向移动磁头
while(head >= 0 && head < CYLINDER_MAX){
while(cylinders[head] > 0){
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
cylinders[head]--;
}
if(dir == 0) head--;
else head++;
}
printf("\nAverage total distance of head movement = %d\n", move_sum);
printf("Average average response time = %f\n\n", (double)(move_sum/req_num));
}
代码说明:
根据SCAN调度算法的原理,通过while循环在磁道内让磁头按指定的方向进行移动,并且处理其中的请求,直到到达记录的磁道的尽头,之后调转磁头移动方向继续移动磁头,同样通过while循环来实现;
实验结果:
Head location: 100
Head moving sequence: 55 58 39 18 90 160 150 38 184
Head moving direction: right
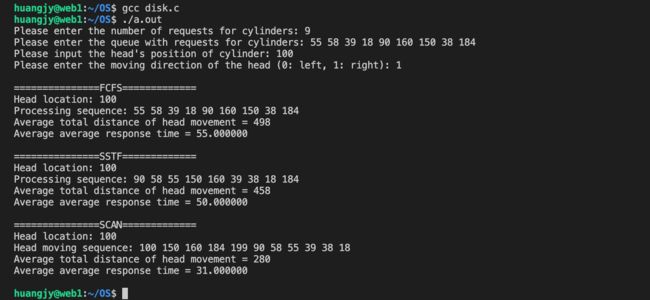
在SCAN调度策略中,输入9个磁道请求序列,指定磁头初始位置为100,磁头向右移动(磁道号增大的方向),最后得到磁头平均移动总距离为280,平均响应时间为31;
与FCFS和SSTF调度策略相比,SCAN的平均移动总距离和平均响应时间均更优;
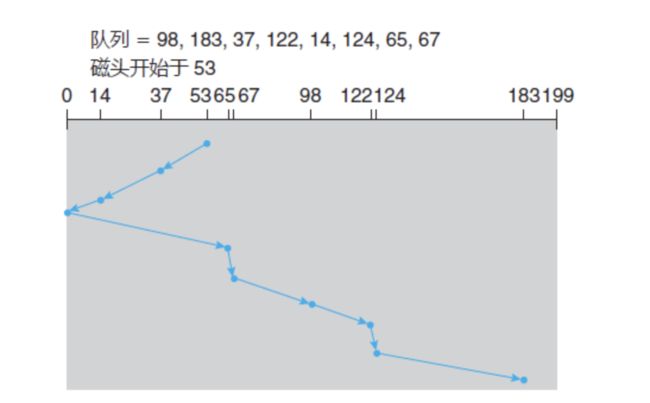
4. C-LOOK
基于SCAN算法,C-LOOK移动磁头从磁盘一端到磁盘另一端(磁臂只需移到一个方向的最远请求为止),并且处理行程上的请求,然而,当磁头到达另一端时,它立即返回到磁盘另一端最远的请求,而并不处理任何回程上的请求,然后从该最远的请求开始,继续往同一方向移动磁盘处理请求。
实现代码:
void C_LOOK(int head, int *request, int *cylinders, int req_num, int dir){
if(dir != 1 && dir != 0){
printf("Direction Error\n");
return;
}
printf("===============C-LOOK=============\n");
int move_sum = 0;
int pre_head = head;
int left = 0, right = 0;//记录最远两端的请求
int flag = 0;
memset(cylinders, 0, CYLINDER_MAX * sizeof(int));
set_request(cylinders, request, req_num);
//获取最远两端的请求left和right
for(int i = 0; i < CYLINDER_MAX; i++){
if(cylinders[i] && !flag) {
left = i;
flag = 1;
}
if(flag && cylinders[i]){
right = i;
}
}
printf("Left Bound: %d, Right Bound: %d\n", left, right);
printf("Head location: %d\n", head);
printf("Head moving sequence: ");
printf("%d ", head);
while(head >= 0 && head < CYLINDER_MAX){
//当磁头到达最远端的请求
if(head == right && dir){
cylinders[head]--;
break;
}
if(head == left && !dir) {
cylinders[head]--;
break;
}
while(cylinders[head] > 0){
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
cylinders[head]--;
}
//磁头按指定方向移动
if(dir == 0) head--;
else head++;
}
// 移动到磁道尽头后, pre_head修改为head的位置,以便磁头换方向移动
if(pre_head != head){
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
}
//直接移动到另一端最远的请求,过程中不处理请求
if(dir == 1){
head = left;
cylinders[head]--;
}
else{
head = right;
cylinders[head]--;
}
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
//磁头继续沿着最初指定的方向移动
while(head >= 0 && head < CYLINDER_MAX){
while(cylinders[head] > 0){
printf("%d ", head);
move_sum += abs(pre_head - head);
pre_head = head;
cylinders[head]--;
}
if(dir == 0) head--;
else head++;
}
printf("\nAverage total distance of head movement = %d\n", move_sum);
printf("Average average response time = %f\n\n", (double)(move_sum/req_num));
}
代码说明:
根据C-LOOK调度算法的原理,首先记录最远两端的请求,保存在变量left和right中,随后通过while循环在磁道内让磁头按指定的方向进行移动,并且处理其中的请求,直到到达记录的最远请求(按移动方向而定),之后将磁头移动到另外一端最远的请求处,从该请求开始继续按最初指定的方向移动磁头,同样通过while循环来实现;
实验结果:
Head location: 100
Head moving sequence: 55 58 39 18 90 160 150 38 184
Head moving direction: right
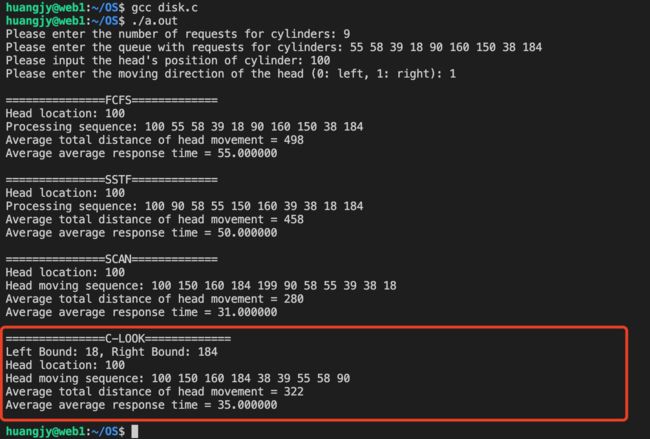
在C-LOOK调度策略中,输入9个磁道请求序列,指定磁头初始位置为100,磁头向右移动(磁道号增大的方向),最后得到磁头平均移动总距离为322,平均响应时间为35;
与FCFS和SSTF调度策略相比,C-LOOK的平均移动总距离和平均响应时间比FCFS和SSTF更优,但是比SCAN调度策略更差;
输入的柱面请求序列具有局部性分布:
Head location: 25
Head moving sequence: 20 30 12 20 30 12 20 30 12 30
Head moving direction: right
请求序列工作集 = {12, 20, 30}
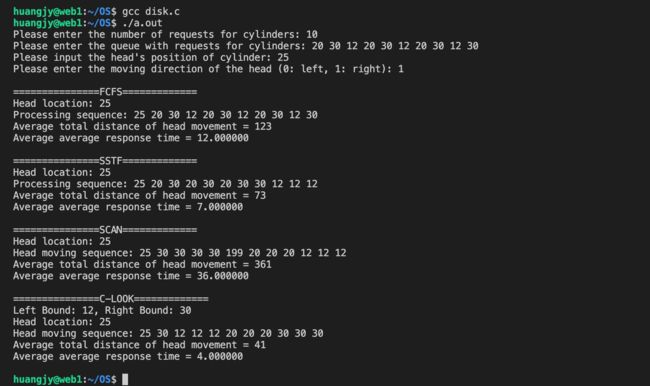
从结果可知,C-LOOK的性能最优,SCAN的性能最差,从直观上来看,由于请求的序列的集中在12,20,30,而SCAN调度算法每次都需要将磁头移动到磁道尽头,这样就导致了移动距离相比其它三个算法更大;而C-LOOK中,磁头移动到请求序列的最远请求就停止,并且处理完该磁道的所有请求后再移动到其它请求处,所以大大减少了磁头移动的距离;SSTF的表现也相对较优;
Head location: 50
Head moving sequence: 10 100 5 10 100 5 10 100 5 10 100 5
Head moving direction: right
请求序列工作集 = {5, 10, 100}
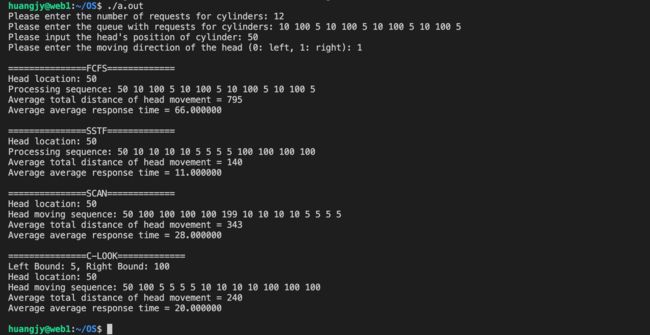
在这个带有局部性的柱面请求序列中,工作集为 {5, 10, 100},可以看到请求5和100之间的距离相对较大;
四种磁头调度算法中,SSTF的性能最优,因为在请求之间距离相对较远的情况下,SSTF总是选择离当前磁头最近的请求进行处理,因此避免了远距离的移动,进而提高性能;
可以看到FCFS的性能最差,总直观上来说,因为请求序列中磁道100和5的请求总是相邻出现的,而它们距离相对较大,所以磁头移动距离就大幅提升了;
II. FCFS、SSTF、SCAN 和 C-LOOK 调度策略的比较
在下表中对四种磁头调度算法的优缺点进行总结:
| 优点 | 缺点 | |
|---|---|---|
| FCFS | 公平、简单 | 平均寻道距离大,仅应用在磁盘I/O较少的场合 |
| SSTF | 性能比FCFS好 | 不能保证平均寻道时间最短(TSP问题)、容易产生“饥饿”现象 |
| SCAN | 寻道性能较好、可避免”饥饿“现象 | 不利于远离磁头一端的访问请求 |
| C-LOOK | 消除了对两端磁道请求的不公平 | ------------------------------------------------------------ |
完整代码:
#include