PyTorch项目实战1-构建UNet实现道路裂纹检测
PyTorch项目实战1-构建UNet实现道路裂纹检测
- 项目构建步骤
-
- 1. 数据集下载
- 2. 数据准备
- 3. 代码所需库引用
- 4. 数据读取
- 5. Unet代码
- 6. 训练代码
- 7. 测试代码
项目构建步骤
本文的内容是参照微信上的一篇公众号,地址如下:
https://mp.weixin.qq.com/s/xeUdW2l71RsHe1Zdzr5a7Q
1. 数据集下载
下载地址:
https://github.com/cuilimeng/CrackForest-dataset

2. 数据准备
因为数据集里的groundTruth是.mat的文件格式,所以需要进行转换,转换代码如下:
#!/user/bin/python
# coding=utf-8
from os.path import isdir
from scipy import io
import os, sys
import numpy as np
import matplotlib.pyplot as plt
from PIL import Image
if __name__ == '__main__':
file_path = 'CrackForest-dataset-master/CrackForest-dataset-master/groundTruth/'
png_img_dir = 'CrackForest-dataset-master/CrackForest-dataset-master/groundTruthPngImg/'
if not isdir(png_img_dir):
os.makedirs(png_img_dir)
image_path_lists = os.listdir(file_path)
images_path = []
for index in range(len(image_path_lists)):
image_file = os.path.join(file_path, image_path_lists[index])
images_path.append(image_file)
image_mat = io.loadmat(image_file)
segmentation_image = image_mat['groundTruth']['Segmentation'][0]
segmentation_image_array = np.array(segmentation_image[0])
image = Image.fromarray((segmentation_image_array -1) * 255)
png_image_path = os.path.join(png_img_dir, "%s.png" % image_path_lists[index][0:3])
image.save(png_image_path)
plt.figure()
plt.imshow(image)
# plt.pause(2)
plt.show()
转换后的图像分割label如下:
3. 代码所需库引用
#!/user/bin/python
# coding=utf-8
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.optim import lr_scheduler, optimizer
import torchvision
import os, sys
import cv2 as cv
from torch.utils.data import DataLoader, sampler
4. 数据读取
class SegmentationDataset(object):
def __init__(self, image_dir, mask_dir):
self.images = []
self.masks = []
files = os.listdir(image_dir)
sfiles = os.listdir(mask_dir)
for i in range(len(sfiles)):
img_file = os.path.join(image_dir, files[i])
mask_file = os.path.join(mask_dir, sfiles[i])
# print(img_file, mask_file)
self.images.append(img_file)
self.masks.append(mask_file)
def __len__(self):
return len(self.images)
def num_of_samples(self):
return len(self.images)
def __getitem__(self, idx):
if torch.is_tensor(idx):
idx = idx.tolist()
image_path = self.images[idx]
mask_path = self.masks[idx]
else:
image_path = self.images[idx]
mask_path = self.masks[idx]
img = cv.imread(image_path, cv.IMREAD_GRAYSCALE) # BGR order
mask = cv.imread(mask_path, cv.IMREAD_GRAYSCALE)
# 输入图像
img = np.float32(img) / 255.0
img = np.expand_dims(img, 0)
# 目标标签0 ~ 1, 对于
mask[mask <= 128] = 0
mask[mask > 128] = 1
mask = np.expand_dims(mask, 0)
sample = {'image': torch.from_numpy(img), 'mask': torch.from_numpy(mask),}
return sample
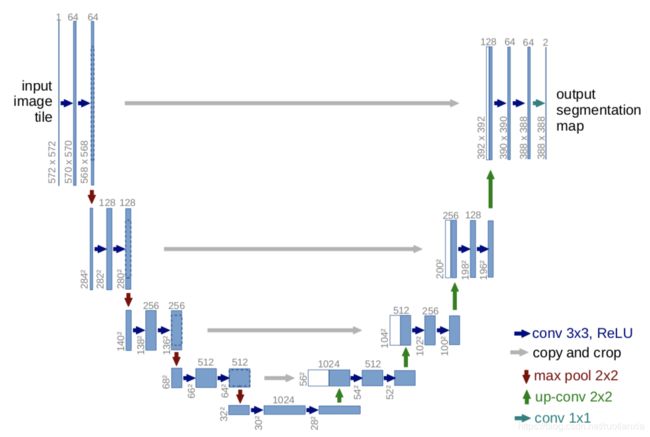
5. Unet代码
class UNetModel(torch.nn.Module):
def __init__(self, in_features=1, out_features=2, init_features=32):
super(UNetModel, self).__init__()
features = init_features
self.encode_layer1 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=in_features, out_channels=features, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features, out_channels=features, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features),
torch.nn.ReLU()
)
self.pool1 = torch.nn.MaxPool2d(kernel_size=2, stride=2)
self.encode_layer2 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features, out_channels=features*2, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features*2),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*2, out_channels=features*2, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 2),
torch.nn.ReLU()
)
self.pool2 = torch.nn.MaxPool2d(kernel_size=2, stride=2)
self.encode_layer3 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*2, out_channels=features*4, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 4),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*4, out_channels=features*4, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 4),
torch.nn.ReLU()
)
self.pool3 = torch.nn.MaxPool2d(kernel_size=2, stride=2)
self.encode_layer4 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*4, out_channels=features*8, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 8),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*8, out_channels=features*8, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 8),
torch.nn.ReLU(),
)
self.pool4 = torch.nn.MaxPool2d(kernel_size=2, stride=2)
self.encode_decode_layer = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*8, out_channels=features*16, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 16),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*16, out_channels=features*16, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 16),
torch.nn.ReLU()
)
self.upconv4 = torch.nn.ConvTranspose2d(
features * 16, features * 8, kernel_size=2, stride=2
)
self.decode_layer4 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*16, out_channels=features*8, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features*8),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*8, out_channels=features*8, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 8),
torch.nn.ReLU(),
)
self.upconv3 = torch.nn.ConvTranspose2d(
features * 8, features * 4, kernel_size=2, stride=2
)
self.decode_layer3 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*8, out_channels=features*4, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 4),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*4, out_channels=features*4, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 4),
torch.nn.ReLU()
)
self.upconv2 = torch.nn.ConvTranspose2d(
features * 4, features * 2, kernel_size=2, stride=2
)
self.decode_layer2 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*4, out_channels=features*2, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 2),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features*2, out_channels=features*2, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features * 2),
torch.nn.ReLU()
)
self.upconv1 = torch.nn.ConvTranspose2d(
features * 2, features, kernel_size=2, stride=2
)
self.decode_layer1 = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features*2, out_channels=features, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features),
torch.nn.ReLU(),
torch.nn.Conv2d(in_channels=features, out_channels=features, kernel_size=3, padding=1, stride=1),
torch.nn.BatchNorm2d(num_features=features),
torch.nn.ReLU()
)
self.out_layer = torch.nn.Sequential(
torch.nn.Conv2d(in_channels=features, out_channels=out_features, kernel_size=1, padding=0, stride=1),
)
def forward(self, x):
enc1 = self.encode_layer1(x)
enc2 = self.encode_layer2(self.pool1(enc1))
enc3 = self.encode_layer3(self.pool2(enc2))
enc4 = self.encode_layer4(self.pool3(enc3))
bottleneck = self.encode_decode_layer(self.pool4(enc4))
dec4 = self.upconv4(bottleneck)
dec4 = torch.cat((dec4, enc4), dim=1)
dec4 = self.decode_layer4(dec4)
dec3 = self.upconv3(dec4)
dec3 = torch.cat((dec3, enc3), dim=1)
dec3 = self.decode_layer3(dec3)
dec2 = self.upconv2(dec3)
dec2 = torch.cat((dec2, enc2), dim=1)
dec2 = self.decode_layer2(dec2)
dec1 = self.upconv1(dec2)
dec1 = torch.cat((dec1, enc1), dim=1)
dec1 = self.decode_layer1(dec1)
out = self.out_layer(dec1)
return out
6. 训练代码
if __name__ == '__main__':
index = 0
num_epochs = 50
train_on_gpu = True
unet = UNetModel().cuda()
# model_dict = unet.load_state_dict(torch.load('unet_road_model-100.pt'))
image_dir = 'CrackForest-dataset-master/CrackForest-dataset-master/image/'
mask_dir = 'CrackForest-dataset-master/CrackForest-dataset-master/groundTruthPngImg/'
dataloader = SegmentationDataset(image_dir, mask_dir)
optimizer = torch.optim.SGD(unet.parameters(), lr=0.01, momentum=0.9)
train_loader = DataLoader(
dataloader, batch_size=1, shuffle=False)
for epoch in range(num_epochs):
train_loss = 0.0
for i_batch, sample_batched in enumerate(train_loader):
images_batch, target_labels = \
sample_batched['image'], sample_batched['mask']
print(target_labels.min())
print(target_labels.max())
if train_on_gpu:
images_batch, target_labels = images_batch.cuda(), target_labels.cuda()
optimizer.zero_grad()
# forward pass: compute predicted outputs by passing inputs to the model
m_label_out_ = unet(images_batch)
# print(m_label_out_)
# calculate the batch loss
target_labels = target_labels.contiguous().view(-1)
m_label_out_ = m_label_out_.transpose(1,3).transpose(1, 2).contiguous().view(-1, 2)
target_labels = target_labels.long()
loss = torch.nn.functional.cross_entropy(m_label_out_, target_labels)
print(loss)
# backward pass: compute gradient of the loss with respect to model parameters
loss.backward()
# perform a single optimization step (parameter update)
optimizer.step()
# update training loss
train_loss += loss.item()
if index % 100 == 0:
print('step: {} \tcurrent Loss: {:.6f} '.format(index, loss.item()))
index += 1
# test(unet)
# 计算平均损失
train_loss = train_loss / dataloader.num_of_samples()
# 显示训练集与验证集的损失函数
print('Epoch: {} \tTraining Loss: {:.6f} '.format(epoch, train_loss))
# test(unet)
# save model
unet.eval()
torch.save(unet.state_dict(), 'unet_road_model.pt')
7. 测试代码
def test(unet):
model_dict=unet.load_state_dict(torch.load('unet_road_model.pt'))
root_dir = 'CrackForest-dataset-master/CrackForest-dataset-master/test/'
fileNames = os.listdir(root_dir)
for f in fileNames:
image = cv.imread(os.path.join(root_dir, f), cv.IMREAD_GRAYSCALE)
h, w = image.shape
img = np.float32(image) /255.0
img = np.expand_dims(img, 0)
x_input = torch.from_numpy(img).view( 1, 1, h, w)
probs = unet(x_input.cuda())
m_label_out_ = probs.transpose(1, 3).transpose(1, 2).contiguous().view(-1, 2)
grad, output = m_label_out_.data.max(dim=1)
output[output > 0] = 255
predic_ = output.view(h, w).cpu().detach().numpy()
# print(predic_)
# print(predic_.max())
# print(predic_.min())
# print(predic_)
# print(predic_.shape)
# cv.imshow("input", image)
result = cv.resize(np.uint8(predic_), (w, h))
cv.imshow("unet-segmentation-demo", result)
cv.waitKey(0)
cv.destroyAllWindows()
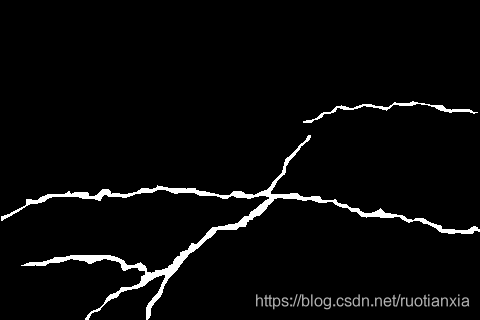
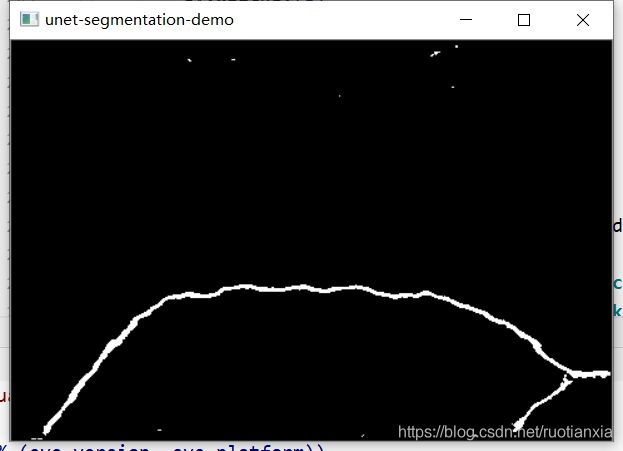
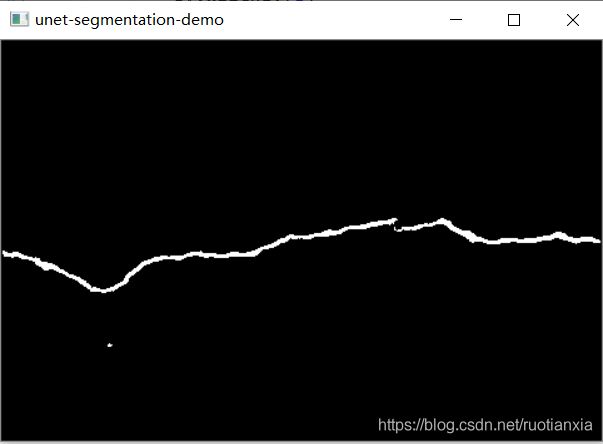
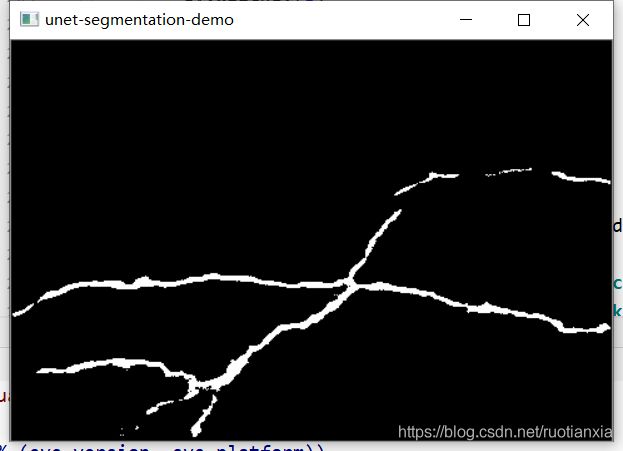
测试结果:
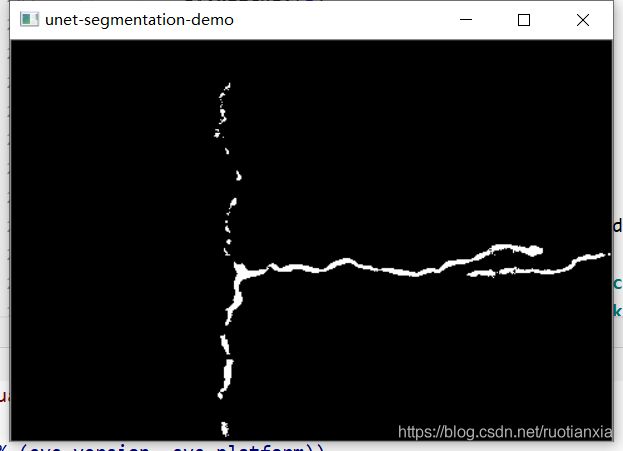
备注:当使用batch大于1的时候,测试时图像是黑色,检查发现,test里面最终的分割预测结果输出为0,怀疑可能是转换成分割时的图像存在问题。后面再去看看其他示例,确认下具体原因,如果有兄弟了解这种现象,可以告知下。。