树莓派4B改装RC玩具车玩转opencv系列教程(四)树莓派4B安装opencv4(含小车整体功能初步联调代码)
树莓派4B改装RC玩具车玩转opencv系列教程(四)树莓派4B安装opencv4
- sudo apt update提示暂时不能解析域名“mirrors.tuna.tsinghua.edu.cn”
- 安装必要的依赖包
- 用whl文件的方式安装opencv4
-
- 下载opencv最新的whl文件
- 将whl文件用filezilla传送到树莓派
- pip3安装whl文件
- opecv色块识别测试结果
- 小车整体联调
- 画外音之===官网教程的失败安装
本文采用的是pip安装opencv4的whl文件的方式。安装文件可以直接从piwheel网站下载。文中给出了具体地址,随时可以获取最新的whl文件,按照下文步骤一步步安装即可,避免了学习树莓派和opencv初期因为对操作环境的不熟悉而无法正常cmake安装opencv的问题。可以直接进入对opencv本身的学习。待操作环境等熟悉后再学习cmake方式安装也不迟。
sudo apt update提示暂时不能解析域名“mirrors.tuna.tsinghua.edu.cn”
在正式进行安装件前最好先对系统和安装的软件update和upgrade。
但是在update和upgrade的时候发现了问题。之前教程(一)中换源所用的地址发生了变化。增加了一个non-free。所以执行sudo apt update的时候提示**==暂时不能解析域名“mirrors.tuna.tsinghua.edu.cn” ==** 。按照清华镜像官网给出的地址进行更新。https://mirrors.tuna.tsinghua.edu.cn/help/raspbian/
# 编辑 `/etc/apt/sources.list` 文件,删除原文件所有内容,用以下内容取代:
deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main non-free contrib rpi
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main non-free contrib rpi
# 编辑 `/etc/apt/sources.list.d/raspi.list` 文件,删除原文件所有内容,用以下内容取代:
deb http://mirrors.tuna.tsinghua.edu.cn/raspberrypi/ buster main ui
完成后update和upgrade成功。(因为我上次用这块板子已经过去有半年了,所以这个部分用的时间有点长,十几分钟的样子)


安装必要的依赖包
关于依赖的部分参考的这个帖子https://www.pyimagesearch.com/2019/09/16/install-opencv-4-on-raspberry-pi-4-and-raspbian-buster/
-
$ sudo apt-get install build-essential cmake pkg-config -
$ sudo apt-get install libjpeg-dev libtiff5-dev libjasper-dev libpng-dev
图片I/O包,方便加载JPEG,PNG,TIFF格式的图片 -
$ sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev -
$ sudo apt-get install libxvidcore-dev libx264-dev
videoI/O包,可以帮助我们从磁盘读取各种vedio,甚至是视频流的读取。 -
$ sudo apt-get install libfontconfig1-dev libcairo2-dev -
$ sudo apt-get install libgdk-pixbuf2.0-dev libpango1.0-dev -
$ sudo apt-get install libgtk2.0-dev libgtk-3-dev
OpenCV库里设计了名为highgui的一个子模块,这个模块实现了图片在屏幕上的显示以及构建基本的GUIs。所以我们需要安装GTK相关的依赖。 -
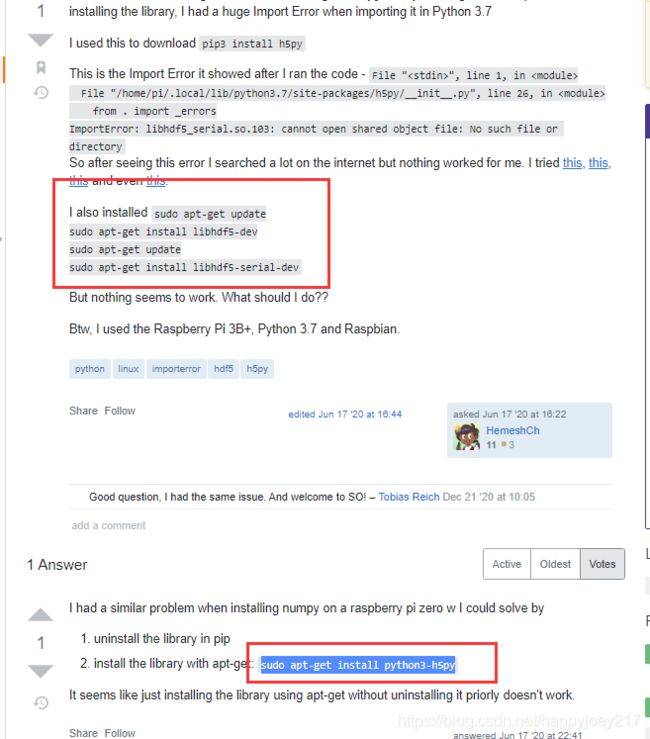
$ sudo apt-get install python3-h5py
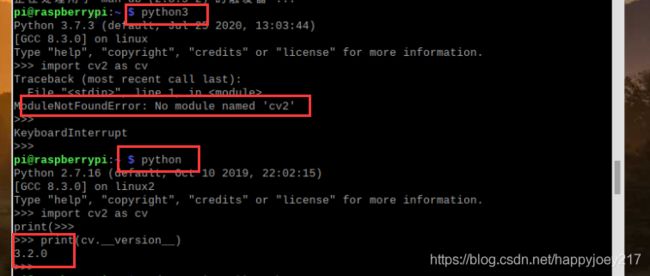
这个库是上面提到的参考文献中没有提及的。是我自己在安装过程中调用cv2时报错发现的。所以不用担心,即使在这一步你不确定是否安装了完整的依赖。运行时发现缺少什么就单独在安装什么也是可以的。安装的方法也很简单。如果缺少响应的依赖,在运行的时候会报错和提示。
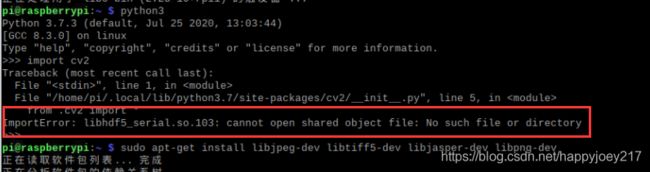
将红框内的报错信息复制粘贴到浏览器中进行搜索。因为信息非常具体,匹配的内容也会特别贴切。很幸运打开一篇帖子就找到了解决办法。所有的报错都可以用这种方法进行解决。只是有时候不想这次这么幸运,需要多查找几个相关的帖子综合得到结论。

用whl文件的方式安装opencv4
下载opencv最新的whl文件
如果直接在终端输入下面的语句回车进行安装时,会发现速度特别慢。
$ sudo pip3 install opencv-contrib-python==4.4.0.46
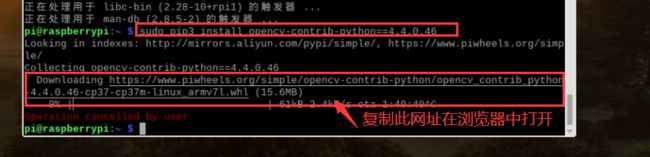
没有关系,我们可以直接打开上图所示的这个网址https://www.piwheels.org/simple/opencv-contrib-python/,在里面直接下载最新的whl文件。这个网站是所有可以使用的opencv的whl文件。虽然比直接make的版本稍低些,但是作为应用开发为目的的入门使用还是ok的。

将whl文件用filezilla传送到树莓派
打开filezilla,输入树莓派的ip地址,用户名为“pi”,密码“***”(此处输入你的树莓派pi用户的密码,初始密码一般为raspberry)。我的whl文件是放在左面的。所以在左侧定位到whl文件直接用鼠标拖拽到右侧pi用户下就开始进行传输了。(接下来的步骤为基本操作已经在教程(一)中详细介绍过了,如果不清楚可以跳到那篇帖子看哈)

pip3安装whl文件
打开树莓派的终端。先输入pwd命令,确认当前的文件夹是不是pi。然后输入ls命令显示本文夹中所有的文件。确认刚刚传送的whl文件确实存在。输入:
sudo pip3 install open
代码不用输完整,输入到上面显示的这样直接按键盘上“Tab”键就自动补全了,然后回车开始安装whl文件。

输入“python3”进入python编译环境,输入“import cv2 as cv”回车。没有报错。再次输入“print(cv.version)”回车。显示出安装的版本。

opecv色块识别测试结果
摄像头采用就是网上最便宜的USB免驱摄像头。

openCV4红色识别,代码来自csdn ReCclay博主 【树莓派4B学习】十一、树莓派4B实现颜色识别,可以直接去他的博客下载到源代码。
小车整体联调
至此,基本功能已经调试完毕,下面给出一段整体联调代码。该段代码实现了通过追踪红色色块实现玩具车转向前进和后退。那么接下来你想用这个小车来帮助你怎样更好的玩转opencv捏?
#coding:utf-8
from collections import deque
import numpy as np
import time
from adafruit_servokit import ServoKit
#import imutils
import cv2
import RPi.GPIO as GPIO
from time import sleep
in1 = 24
in2 = 23
en = 25
GPIO.setmode(GPIO.BCM)
GPIO.setup(in1,GPIO.OUT)
GPIO.setup(in2,GPIO.OUT)
GPIO.setup(en,GPIO.OUT)
GPIO.output(in1,GPIO.LOW)
GPIO.output(in2,GPIO.LOW)
p=GPIO.PWM(en,1000)
p.start(25)
kit = ServoKit(channels=16)
preRadius=0
#设定红色阈值,HSV空间
redLower = np.array([170, 100, 100])
redUpper = np.array([179, 255, 255])
#初始化追踪点的列表
mybuffer = 16
pts = deque(maxlen=mybuffer)
counter = 0
#打开摄像头
camera = cv2.VideoCapture(0)
#等待两秒
time.sleep(3)
#遍历每一帧,检测红色识别物体
while True:
#读取帧
(ret, frame) = camera.read()
#判断是否成功打开摄像头
if not ret:
print ('No Camera')
break
#frame = imutils.resize(frame, width=600)
#转到HSV空间
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
#根据阈值构建掩膜
mask = cv2.inRange(hsv, redLower, redUpper)
#腐蚀操作
mask = cv2.erode(mask, None, iterations=2)
#膨胀操作,其实先腐蚀再膨胀的效果是开运算,去除噪点
mask = cv2.dilate(mask, None, iterations=2)
cnts = cv2.findContours(mask.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2]
#初始化识别物体圆形轮廓质心
center = None
#如果存在轮廓
if len(cnts) > 0:
#找到面积最大的轮廓
c = max(cnts, key = cv2.contourArea)
#确定面积最大的轮廓的外接圆
((x, y), radius) = cv2.minEnclosingCircle(c)
#计算轮廓的矩
M = cv2.moments(c)
#计算质心
center = (int(M["m10"]/M["m00"]), int(M["m01"]/M["m00"]))
#只有当半径大于10时,才执行画图 此处用圆半径的大小作为判断小车前进和后退的依据
if radius > 10:
cv2.circle(frame, (int(x), int(y)), int(radius), (0, 255, 255), 2)
cv2.circle(frame, center, 5, (0, 0, 255), -1)
#motor control
print("preRadius")
print(preRadius)
print("radius")
print(radius)
if preRadius > radius:
print("QJ")
GPIO.output(in1,GPIO.HIGH)
GPIO.output(in2,GPIO.LOW)
else:
print("HT")
GPIO.output(in1,GPIO.LOW)
GPIO.output(in2,GPIO.HIGH)
preRadius = radius
#把质心添加到pts中,并且是添加到列表左侧
pts.appendleft(center)
else:#如果图像中没有检测到识别物体,则清空pts,图像上不显示轨迹。
pts.clear()
for i in range(1, len(pts)):
if pts[i - 1] is None or pts[i] is None:
continue
#计算所画小线段的粗细
thickness = int(np.sqrt(mybuffer / float(i + 1)) * 2.5)
#画出小线段
cv2.line(frame, pts[i - 1], pts[i], (0, 0, 255), thickness)
#判断移动方向并控制舵机转动
if counter >= 10 and i == 1 and len(pts) >= 10:
dX = pts[-10][0] - pts[i][0]
dY = pts[-10][1] - pts[i][1]
(dirX, dirY) = ("", "")
if np.abs(dX) > 20:
dirX = "Left" kit.servo[0].angle = 60
time.sleep(1)
kit.servo[0].angle = 0 if np.sign(dX) == 1 else "Right" kit.servo[0].angle = 0
time.sleep(1)
kit.servo[0].angle = 60#此处仅简单测试了转动的功能,效果还待加入KID
if np.abs(dY) > 20:
dirY = "Down" if np.sign(dY) == 1 else "Up"
if dirX != "" and dirY != "":
direction = "{}-{}".format(dirY, dirX)
else:
direction = dirX if dirX != "" else dirY
cv2.putText(frame, direction, (20, 50), cv2.FONT_HERSHEY_SIMPLEX, 2,
(0, 255, 0), 3)
cv2.putText(frame, "dx: {}, dy: {}".format(dX, dY), (10, frame.shape[0] - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.35, (0, 0, 255), 1)
#键盘检测,检测到esc键退出
k = cv2.waitKey(1)&0xFF
counter += 1
if k == 27:
break
#摄像头释放
camera.release()
#销毁所有窗口
cv2.destroyAllWindows()
画外音之===官网教程的失败安装
https://docs.opencv.org/4.5.1/d2/de6/tutorial_py_setup_in_ubuntu.html
- 选择最新版本

- 按照提示进行安装
$ sudo apt-get install python-opencv


输入Y按回车继续安装
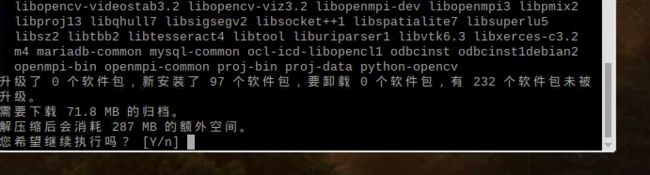
安装好后发现版本特别低完全不是最新的。再次仔细阅读官网的安装说明才发现下面还有一小段话。
官网太可爱了吧。。。说了一堆,还说“it is quite easy”。。非常简单但是话锋一转告诉你安装的版本极低。。。嘿嘿嘿。
