ROS Noetic入门完整版
文章目录
-
- 一、ROS基础概述
-
- 1、操作系统安装
- 2、ROS Noetic安装
- 3、常用工具安装
-
- 1、Terminator
- 2、VScode
- 二、核心概念
-
- 1、ROS介绍
- 2、ROS核心概念
- 3、ROS常用命令行工具
- 三、编程基础
-
- 1、工作空间创建
- 2、Topic话题通信
-
- 1、发布者publisher编程实现
- 2、订阅者subscriber编程实现
- 3、自定义话题通信
-
- 1、C++文件
- 2、python文件
- 3、Service服务通信
-
- 1、客户端Client编程实现
- 2、服务端Service编程实现
- 3、自定义数据服务
-
- 1、C++文件
- 2、python文件
- 4、全局参数使用与编程
-
-
- 1、C++文件
- 2、python文件
-
- 5、launch启动文件
-
- 1、基本介绍
- 2、launch简单示例
- 四、通信机制进阶
-
- 1、常用API
-
- 1、初始化
- 2、话题和服务
- 3、回旋函数
- 4、时间
- 5、其他函数
- 2、自定义头文件和源文件
-
- 1、自定义头文件
- 2、自定义源文件
- 3、python模块导入
- 五、ROS运行管理
-
- 1、元功能包
- 2、ROS节点重命名
- 3、ROS话题名称
- 4、ROS参数名设置
- 5、ROS分布式
-
-
- 1.准备
- 2.配置文件修改
- 3.配置主机IP
- 4.配置从机IP
-
- 六、ROS常用组件
-
- 1、TF坐标变换
-
- 1、坐标msg消息
- 2、静态坐标建立
-
- 1、C++实现
- 2、python实现
- 3、动态坐标建立
-
- 1、C++
- 2、python
- 4、多坐标点变换
- 5、坐标位置查看
- 6、海龟跟随实战
- 2、rosbag
-
- **命令行**
- **代码运行**
-
- 1、C++实现
- 2.读bag
-
- 2、python实现
- 1、简单介绍与使用
- 2、广播与监听编程实现
- 3、可视化工具
- 七、机器人系统仿真
-
- 1、概述
- 2、URDF集成Rviz基本流程
-
- 1.创建功能包,导入依赖
- 2.编写 URDF 文件
- 3.在 launch 文件中集成 URDF 与 Rviz
- 4.在 Rviz 中显示机器人模型
- 5.优化 rviz 启动
- 3、URDF语法学习
-
- robot标签
- link标签
- joint
- URDF工具
- 4、URDF之xacro
-
- 1、快速体验
- 2、xacro语法学习
- 3、xacro模型实现
- 5、Rviz控制机器人运动(arbotix)
- 6、URDF集成Gazebo
-
- 1、快速体验
- 2、gazebo相关设置
- 3、仿真环境的搭建与使用
- 7、URDF、Rviz和Gazebo综合使用
- 八、机器人导航
-
- 1、导航概述
- 2、导航实现
-
- 1、准备工作
- 2、SLAM建图
- 3、地图服务
- 4、定位
-
-
- 执行
-
- 5、路径规划
- 6、导航与SLAM建图
-
- 1.编写launch文件
- 2.测试
- 九、学习资料
一、ROS基础概述
1、操作系统安装
ROS目前只能在基于Unix的平台上运行,因此我们使用Ubuntu来作为ROS的系统。这里我们安装了Ubuntu20.04和ROS Noetic Ninjemys。本机和虚拟机安装详见以下文章,选其中一种即可
笔记本安装 Windows10 和 Ubuntu20.04 双系统
VMWare虚拟机安装Ubuntu20.04详细过程
2、ROS Noetic安装
官网ROS Noetic安装教程参考:https://wiki.ros.org/cn/noetic/Installation/Ubuntu
1、配置系统软件源
打开“软件更新”,进入到“Ubuntu软件“页面,允许universe、restricted、multiverse三项,源换成国内源即可。
2、添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3、设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
4、安装ROS
#更新apt索引包
sudo apt update
#安装桌面完整版,若网络原因失败可多安装几次或使用手机热点
sudo apt install ros-noetic-desktop-full
5、设置环境
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
注意: 在 ROS 版本 noetic 中无需构建软件包的依赖关系,没有rosdep的相关安装与配置,其他版本需要安装。
6、小海龟测试
终端输入roscore可以查看安装好的ros的发行版名称为noetic和版本号;ctrl+Alt+t再次打开一个新的终端,输入rosrun turtlesim turtlesim_node,即会出现小海龟的仿真界面;再次打开新终端,输入rosrun turtlesim turtle_teleop_key,即可控制小海龟移动了。
7、ROS的卸载
sudo apt remove ros-noetic-*
8、安装构建依赖
#安装构建依赖相关工具
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
#初始化rosdep
sudo rosdep init
rosdep update
#若一切顺利即可ok
#--------------------------------
#出现问题后找备份 https://gitee.com/zhao-xuzuo/rosdistro
cd /usr/lib/python3/dist-packages/
find . -type f | xargs grep "raw.githubusercontent"
#修改相关文件,使用sudo gedit
./rosdistro/__init__.py
./rosdep2/gbpdistro_support.py
./rosdep2/sources_list.py
./rosdep2/rep3.py
#文件中涉及的 URL 内容,如果是:raw.githubusercontent.com/ros/rosdistro/master都替换成gitee.com/zhao-xuzuo/rosdistro/raw/master
#修改完毕,再重新执行命令
sudo rosdep init
rosdep update
3、常用工具安装
1、Terminator
sudo apt install terminator
Alt+Up //移动到上面的终端
Alt+Down //移动到下面的终端
Alt+Left //移动到左边的终端
Alt+Right //移动到右边的终端
Ctrl+Shift+O //水平分割终端
Ctrl+Shift+E //垂直分割终端
Ctrl+Shift+C //复制选中的内容到剪贴板
Ctrl+Shift+V //粘贴剪贴板的内容到此处
Ctrl+Shift+W //关闭当前终端
Ctrl+Shift+Q //退出当前窗口,当前窗口的所有终端都将被关闭
Ctrl+Shift+X //最大化显示当前终端
2、VScode
下载地址:https://code.visualstudio.com/docs?start=true,下载deb,双击进行安装。
#第二种方式安装
sudo dpkg -i xxxx.deb
#卸载
sudo dpkg --purge code
VScode插件安装
C/C++
python
CMake Tools
ROS
#-------
#在当前目录打开VScode
code .
vscode 中编译 ros
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build
可以点击配置设置为默认,修改.vscode/tasks.json 文件,此后ctrl + shift + B可直接编译
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
添加功能包,选定 src 右击 —> create catkin package
PS1: 如果没有代码提示
如果VS没有智能提示,修改 .vscode/c_cpp_properties.json
设置 "cppStandard": "c++17"
PS2: main 函数的参数不可以被 const 修饰
PS3: 当ROS__INFO 终端输出有中文时,会出现乱码
#添加任意一句即可
setlocale(LC_CTYPE, "zh_CN.utf8");
setlocale(LC_ALL, "");
PS4:运行python文件可能会找不到文件或目录
因为ubuntu20.04默认使用python3,有三种解决方法
解决1: #!/usr/bin/env python3 直接使用 python3 (不推荐)
解决2: 创建一个链接符号到 python 命令:sudo ln -s /usr/bin/python3 /usr/bin/python
解决3:像C++一样进行链接编译,让程序自动寻找合适解释器
二、核心概念
1、ROS介绍
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。
ROS中文官网:https://wiki.ros.org/cn
2、ROS核心概念
节点与节点管理器
-
节点(Node)—— 执行单元
执行具体任务的进程、独立运行的可执行文件;不同节点可使用不同的编程语言,可分布式运行在不同的主机;节点在系统中的名称必须是唯一的。 -
节点管理器 (ROS Master)—— 控制中心
为节点提供命名和注册服务;跟踪和记录话题/服务通信,辅助节点相互查找、 建立连接;提供参数服务器,节点使用此服务器存储和检索 运行时的参数。
话题通信
-
话题(Topic)—— 异步通信机制
节点间用来传输数据的重要总线;使用发布(Publisher)/订阅(Subscriber)模型,数据由发布者传输到订阅者,同一个话题的订阅者或发布者可以不唯一。 -
消息(Message)——话题数据
话题的具体数据称为消息(Message),使用.msg文件定义;消息用来描述话题当中具体的数据类型,在ROS中,有些消息已经被预定义了,比如雷达、图像等,也可以自定义消息。
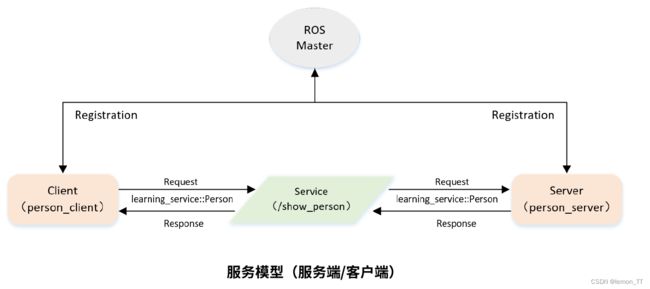
服务通信
- 服务(Service)—— 同步通信机制
使用客户端(Service)/服务器(Client)模型,客户端发送请求数据,服务器完成 处理后返回应答数据。使用.src文件定义。
话题与服务区别
| 话题 | 服务 | |
|---|---|---|
| 同步性 | 异步 | 同步 |
| 通信模型 | 发布/订阅 | 服务器/客户端 |
| 底层协议 | ROSTCP/ROSUDP | ROSTCP/ROSUDP |
| 反馈机制 | 无 | 有 |
| 缓冲区 | 有 | 无 |
| 实时性 | 弱 | 强 |
| 节点关系 | 多对多 | 一对多(一个server) |
| 适用场景 | 数据传输,连续高频的数据发布与接收:雷达、里程计 | 逻辑处理,偶尔调用或执行某一项特定功能:拍照、语音识别 |
| 通信数据 | msg | srv |
参数
- 参数(Parameter)—— 全局共享字典
可通过网络访问的共享、多变量字典;节点使用此服务器来存储和检索运行时的参数;适合存储静态、非二进制的配置参数,不适合存储动态配置的数据。
文件系统
-
功能包(Package): ROS软件中的基本单元,包含节点源码、配置文件、数据定义等。
-
功能包清单(Package manifest):记录功能包的基本信息,包含作者信息、许可信息、依赖选项、编译标志等。
-
元功能包(Meta Packages):组织多个用于同一目的功能包。
3、ROS常用命令行工具
http://wiki.ros.org/ROS/CommandLineTools
#分别在四个终端打开运行
#启动ROS Master
roscore
#启动海龟仿真节点
rosrun turtlesim turtlesim_node
#启动海龟控制节点
rosrun turtlesim turtle_teleop_key
#查看系统运行计算图
rqt_graph
rosnode节点命令
#查看活动节点
rosnode list
#查看某一节点具体信息
rosnode info /turtlesim
rostopic话题命令
#打印pub发布的数据
rostopic echo pub
#以10Hz的频率发布话题移动海龟,这里命令用双击tab补全后修改
#速度为m/s,角度为弧度/s
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"
rosmsg消息命令
#查看消息
rosmsg show geometry_msgs/Twist
rosservice服务命令
#打印可用服务
rosservice list
#创建一个新海龟
rosservice call /spawn "x: 2.0
y: 2.0
theta: 0.0
name: 'turtle2'"
rosbag命令
#保存所有步骤,-O代表保存的压缩包路径
rosbag record -a -O cmd_record
#复原所有步骤
rosbag play cmd_record.bag
rossrv
#rossrv是用于显示有关ROS服务类型的信息的命令行工具,与 rosmsg 使用语法高度雷同。
rossrv show #显示服务消息详情
rossrv info #显示服务消息相关信息
rossrv list #列出所有服务信息
rossrv md5 #显示 md5 加密后的服务消息
rossrv package #显示某个包下所有服务消息
rossrv packages #显示包含服务消息的所有包
rosparam
#rosparam包含rosparam命令行工具,用于使用YAML编码文件在参数服务器上获取和设置ROS参数。
#列出当前多有参数
rosparam list
#显示某个参数值
rosparam get param_key
#设置某个参数值
rosparam set param_key param_value
#保存参数到文件
rosparam dump file_name
#从文件读取参数
rosparam load file_name
#删除参数
rosparam delete param_key
#增
catkin_create_pkg #自定义包名 依赖包 === 创建新的ROS功能包
sudo apt install xxx #=== 安装 ROS功能包
#删
sudo apt purge xxx #==== 删除某个功能包
#查
rospack list #=== 列出所有功能包
rospack find 包名 #=== 查找某个功能包是否存在,如果存在返回安装路径
roscd 包名 #=== 进入某个功能包
rosls 包名 #=== 列出某个包下的文件
apt search xxx #=== 搜索某个功能包
#改
rosed 包名 文件名 #=== 修改功能包文件
#需要安装 vim
#比如:rosed turtlesim Color.msg
#执行
roscore
三、编程基础
步骤
- 先创建一个工作空间;
- 创建一个功能包;
- 编辑源文件;
- 编辑配置文件;
- 编译并执行。
1、工作空间创建
工作空间(workspace)是一个存放工程开发相关文件的文件夹。
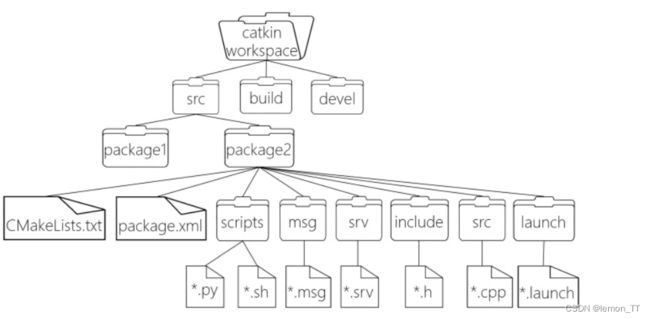
- src:代码空间(Source Space)
- build:编译空间(Build Space)
- devel:开发空间(Development Space)
- install:安装空间(Install Space)
1、创建工作空间catkin_ws
#创建目录
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
#初始化文件夹
catkin_init_workspace
#src文件中创建了一个 CMakeLists.txt 的文件,目的是告诉系统,这个是ROS的工作空间。
**2、编译工作空间 **
#需要在整个工作目录下编译
#编译完成后,会出现build 和 devel两个文件夹
cd ~/catkin_ws/
catkin_make
#生成install文件夹
catkin_make install
3、设置环境变量
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
#查看当前环境变量
echo $ROS_PACKAGE_PATH
4、创建功能包
#std_msgs:包含常见消息类型,标准消息库
#roscpp:使用C++实现ROS各种功能
#rospy:使用python实现ROS各种功能
#test_pkg就是其中一个功能包,还可以下载其他功能包
cd ~/catkin_ws/src
catkin_create_pkg test_pkg std_msgs roscpp rospy
package.xml是功能包的描述文件,CMakeLists.txt定义编译规则,编译出的文件在devel目录下的include文件夹(头文件)和lib文件夹(可执行文件)
5、编译功能包
cd ~/catkin_ws
catkin_make
2、Topic话题通信

下载功能包
#下面的服务功能都需要依赖以下功能包
cd ~/catkin_ws/srcs
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
1、发布者publisher编程实现
指发布程序代码给海龟仿真器,控制海龟运动
1、编写发布者代码
发布者流程
- 初始化ROS节点;
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型;
- 创建消息数据;
- 按照一定频率循环发布消息。
以下两种语言二选一即可
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
* 将代码保存在功能包下的src目录下,并命名为velocity_publisher.cpp
*/
#include python文件需要确保文件拥有可执行权限,这里我把python文件都放在了scripts文件夹下,在此打开终端,运行chmod +x *.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
#python程序,区分与cpp文件,将代码保存在功能包下的scripts目录下,并命名为velocity_publisher.py
# 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
import rospy
from geometry_msgs.msg import Twist
def velocity_publisher():
# ROS节点初始化
rospy.init_node('velocity_publisher', anonymous=True)
# 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
#休眠的原因是注册未完成可能已经发出消息了,导致消息丢失
rospy.sleep(3)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化geometry_msgs::Twist类型的消息
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
# 发布消息
turtle_vel_pub.publish(vel_msg)
rospy.loginfo("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
2、定义编译规则
仅C++代码需要定义编译规则,python代码可直接运行
#打开功能包的CMakeLists.txt文件,在build下添加以下规则
#编译
add_executable(velocity_publisher src/velocity_publisher.cpp)
#链接
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
3、编译
仅C++代码需要编译,python代码可直接运行
#要在工作空间下编译
cd ~/catkin_ws
catkin_make
4、运行
运行成功后海龟按照发布者的程序进行运动
#首先刷新一下环境变量,放入本地环境变量了也可以不刷新
source ~/catkin_ws/devel/setup.bash
#分别在三个终端打开,就可以看见海龟运行了
roscore
rosrun turtlesim turtlesim_node
#python运行以下命令
#若出现“python3”: 没有那个文件或目录,则需要更改py文件中的python解释器
rosrun learning_topic velocity_publisher.py
#C++运行下面命令
rosrun learning_topic velocity_publisher
2、订阅者subscriber编程实现
流程步骤与发布者相似,订阅者可以监听海龟的位置信息变化并打印在屏幕
订阅者流程
- 初始化ROS节点;
- 订阅需要的话题;
- 循环等待话题消息,接收到消息后进入回调函数;
- 在回调函数中完成消息处理。
C++订阅代码
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include python订阅代码
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
import rospy
from turtlesim.msg import Pose
def poseCallback(msg):
rospy.loginfo("Turtle pose: x:%0.6f, y:%0.6f", msg.x, msg.y)
def pose_subscriber():
# ROS节点初始化
rospy.init_node('pose_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
rospy.Subscriber("/turtle1/pose", Pose, poseCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
pose_subscriber()
3、自定义话题通信
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,就会显得力不从心,这时候就需要自定义消息。
ROS Master作为节点管理者,负责节点之间的通信连接,一旦发布者和消息者之间连通后,master关机后两者仍可通信,但无法更改对象

在learning_topic文件夹下创建msg文件夹,在里面创建Person.msg文件(注意一定要叫msg文件夹,在CMakeLists.txt规则有写),定义话题消息
string name
uint8 sex
uint8 age
uint8 unknown=0
uint8 male=1
uint8 female=2
在功能包的package.xml文件下添加依赖
<build_depend>message_generationbuild_depend>
<exec_depend>message_runtimeexec_depend>
在CMakeLists.txt文件下添加编译规则,C++和python都需要。找到对应的配置文件下添加编译选项
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
turtlesim
#添加
message_generation
)
#添加,配置 msg 源文件
add_message_files(
FILES
Person.msg
)
#添加,生成消息时依赖于 std_msgs
generate_messages(DEPENDENCIES
std_msgs
)
catkin_package(
#添加,执行时依赖
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs turtlesim message_runtime
)
最后编译生成相关依赖
cd ~/catkin_ws
#编译
catkin_make
C++ 需要调用的中间文件(…/工作空间/devel/include/包名/xxx.h)
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/msg)
1、C++文件
C++文件放置在功能包learning_topic下的src文件夹
为了方便代码提示,可在vscode中的c_cpp_properties.json下的includePath中添加编译好的头文件目录,若存在就无须配置,我的是"/home/shawn/catkin_ws/src/learning_parameter/include/**",
发布者
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include 订阅者
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 在CMakeLists.txt文件下的build下添加编译规则
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
编译与运行
cd ~/catkin_ws
catkin_make
roscore
rosrun learning_topic person_publisher
rosrun learning_topic person_subscriber
#查看节点图
rosrun rqt_graph rqt_graph
2、python文件
py文件都放置在功能包learning_topic下的scripts文件夹
为了方便代码提示,可在vscode中的settings.json下的python.autoComplete.extraPaths中添加编译好的头文件目录,若存在就无须配置,我的是"/home/shawn/catkin_ws/devel/lib/python3/dist-packages"
发布者
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning_topic.msg import Person
def velocity_publisher():
# ROS节点初始化
rospy.init_node('person_publisher', anonymous=True)
# 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
person_info_pub = rospy.Publisher('/person_info', Person, queue_size=10)
#设置循环的频率
rate = rospy.Rate(10)
while not rospy.is_shutdown():
# 初始化learning_topic::Person类型的消息
person_msg = Person()
person_msg.name = "Tom"
person_msg.age = 18
person_msg.sex = Person.male
# 发布消息
person_info_pub.publish(person_msg)
rospy.loginfo("Publsh person message[%s, %d, %d]",
person_msg.name, person_msg.age, person_msg.sex)
# 按照循环频率延时
rate.sleep()
if __name__ == '__main__':
try:
velocity_publisher()
except rospy.ROSInterruptException:
pass
订阅者
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
import rospy
from learning_topic.msg import Person
def personInfoCallback(msg):
rospy.loginfo("Subcribe Person Info: name:%s age:%d sex:%d",
msg.name, msg.age, msg.sex)
def person_subscriber():
# ROS节点初始化
rospy.init_node('person_subscriber', anonymous=True)
# 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
rospy.Subscriber("/person_info", Person, personInfoCallback)
# 循环等待回调函数
rospy.spin()
if __name__ == '__main__':
person_subscriber()
运行
#获得可执行权限
chmod +x ~/catkin_ws/src/learning_topic/scripts/*.py
cd ~/catkin_ws
rosrun learning_topic person_subscriber.py
rosrun learning_topic person_publisher.py
#查看节点图
rosrun rqt_graph rqt_graph
3、Service服务通信

下载功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
1、客户端Client编程实现
C++代码
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include
#include
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
在CMakeLists.txt增加编译规则
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
运行
cd ~/catkin_ws
#编译
catkin_make
#三个窗口打开
roscore
rosrun turtlesim turtlesim_node
osrun learning_service turtle_spawn
python代码
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
import sys
import rospy
from turtlesim.srv import Spawn
def turtle_spawn():
# ROS节点初始化
rospy.init_node('turtle_spawn')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/spawn')
try:
add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,输入请求数据
response = add_turtle(2.0, 2.0, 0.0, "turtle2")
return response.name
except rospy.ServiceException as e:
print("Service call failed: %s"%e)
if __name__ == "__main__":
#服务调用并显示调用结果
print("Spwan turtle successfully [name:%s]" %(turtle_spawn()))
运行
cd ~/catkin_ws
#三个窗口打开
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn.py
2、服务端Service编程实现
C++代码
/**
* 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
*/
#include
#include
#include
ros::Publisher turtle_vel_pub;
bool pubCommand = false;
// service回调函数,输入参数req,输出参数res
bool commandCallback(std_srvs::Trigger::Request &req,
std_srvs::Trigger::Response &res)
{
pubCommand = !pubCommand;
// 显示请求数据
ROS_INFO("Publish turtle velocity command [%s]", pubCommand==true?"Yes":"No");
// 设置反馈数据
res.success = true;
res.message = "Change turtle command state!"
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "turtle_command_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/turtle_command的server,注册回调函数commandCallback
ros::ServiceServer command_service = n.advertiseService("/turtle_command", commandCallback);
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = n.advertise("/turtle1/cmd_vel", 10);
// 循环等待回调函数
ROS_INFO("Ready to receive turtle command.");
// 设置循环的频率
ros::Rate loop_rate(10);
while(ros::ok())
{
// 查看一次回调函数队列
ros::spinOnce();
// 如果标志为true,则发布速度指令
if(pubCommand)
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
}
//按照循环频率延时
loop_rate.sleep();
}
return 0;
}
python代码
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
import rospy
import _thread,time
from geometry_msgs.msg import Twist
from std_srvs.srv import Trigger, TriggerResponse
pubCommand = False;
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
def command_thread():
while True:
if pubCommand:
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
turtle_vel_pub.publish(vel_msg)
time.sleep(0.1)
def commandCallback(req):
global pubCommand
pubCommand = bool(1-pubCommand)
# 显示请求数据
rospy.loginfo("Publish turtle velocity command![%d]", pubCommand)
# 反馈数据
return TriggerResponse(1, "Change turtle command state!")
def turtle_command_server():
# ROS节点初始化
rospy.init_node('turtle_command_server')
# 创建一个名为/turtle_command的server,注册回调函数commandCallback
s = rospy.Service('/turtle_command', Trigger, commandCallback)
# 循环等待回调函数
print("Ready to receive turtle command.")
_thread.start_new_thread(command_thread, ())
rospy.spin()
if __name__ == "__main__":
turtle_command_server()
其他操作和客户端相似,海龟启动后通过rosservice call /turtle_command命令改变海龟运动状态
3、自定义数据服务
自定义请求和应答内容,通过请求进行控制
在learning_service文件夹下创建srv文件夹,在里面创建Person.srv文件(注意一定要叫srv文件夹,在CMakeLists.txt规则有写),定义数据。三杠上方代表Request参数,下方代表Response参数
string name
uint8 age
uint8 sex
uint8 unknown=0
uint8 male=1
uint8 female=2
---
string result
在功能包的package.xml文件下添加依赖
<build_depend>message_generationbuild_depend>
<exec_depend>message_runtimeexec_depend>
在CMakeLists.txt文件下添加编译规则,C++和python都需要。找到对应的配置文件下添加编译选项
find_package(catkin REQUIRED COMPONENTS
geometry_msgs
roscpp
rospy
std_msgs
turtlesim
#找到功能包作为依赖
message_generation
)
#需要让编译器找到文件在哪
add_service_files(
FILES
Person.srv
)
#产生文件依赖
generate_messages(DEPENDENCIES
std_msgs
)
catkin_package(
#添加
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs turtlesim message_runtime
)
最后编译生成相关依赖
cd ~/catkin_ws
#编译
catkin_make
1、C++文件
服务器
/**
* 该例程将执行/show_person服务,服务数据类型learning_service::Person
*/
#include 客户端
/**
* 该例程将请求/show_person服务,服务数据类型learning_service::Person
*/
#include 在CMakeLists.txt文件下的build下添加编译规则
add_executable(person_server src/person_server.cpp)
target_link_libraries(person_server ${catkin_LIBRARIES})
add_dependencies(person_server ${PROJECT_NAME}_gencpp)
add_executable(person_client src/person_client.cpp)
target_link_libraries(person_client ${catkin_LIBRARIES})
add_dependencies(person_client ${PROJECT_NAME}_gencpp)
编译运行
cd ~/catkin_ws
catkin_make
roscore
rosrun learning_service person_server
rosrun learning_service person_client
2、python文件
服务器
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将执行/show_person服务,服务数据类型learning_service::Person
import rospy
from learning_service.srv import Person, PersonResponse
def personCallback(req):
# 显示请求数据
rospy.loginfo("Person: name:%s age:%d sex:%d", req.name, req.age, req.sex)
# 反馈数据
return PersonResponse("OK")
def person_server():
# ROS节点初始化
rospy.init_node('person_server')
# 创建一个名为/show_person的server,注册回调函数personCallback
s = rospy.Service('/show_person', Person, personCallback)
# 循环等待回调函数
print("Ready to show person informtion.")
rospy.spin()
if __name__ == "__main__":
person_server()
客户端
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程将请求/show_person服务,服务数据类型learning_service::Person
import sys
import rospy
from learning_service.srv import Person, PersonRequest
def person_client():
# ROS节点初始化
rospy.init_node('person_client')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/show_person')
try:
person_client = rospy.ServiceProxy('/show_person', Person)
# 请求服务调用,输入请求数据
response = person_client("Tom", 20, PersonRequest.male)
return response.result
except rospy.ServiceException as e:
print("Service call failed: %s"%e)
if __name__ == "__main__":
#服务调用并显示调用结果
print(Show person result : %s" %(person_client()))
运行
#获得可执行权限
chmod +x ~/catkin_ws/src/learning_service/scripts/*.py
#三个终端打开
roscore
rosrun learning_service person_server
rosrun learning_service person_client
4、全局参数使用与编程
参数服务器以共享的方式实现不同节点之间数据交互的通信模式,存储一些多节点共享的数据,类似于全局变量。
下载功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_parameter roscpp rospy std_srvs
1、C++文件
和前面一样,需要添加编译规则
/**
* 该例程设置/读取海龟例程中的参数
*/
#include 添加编译规则
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})
运行
cd ~/catkin_ws
catkin_make
roscore
rosrun turtlesim turtlesim_node
rosrun learning_parameter parameter_config
2、python文件
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 该例程设置/读取海龟例程中的参数
import sys
import rospy
from std_srvs.srv import Empty
def parameter_config():
# ROS节点初始化
rospy.init_node('parameter_config', anonymous=True)
# 读取背景颜色参数
red = rospy.get_param('/turtlesim/background_r')
green = rospy.get_param('/turtlesim/background_g')
blue = rospy.get_param('/turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 设置背景颜色参数
rospy.set_param("/turtlesim/background_r", 255);
rospy.set_param("/turtlesim/background_g", 255);
rospy.set_param("/turtlesim/background_b", 255);
rospy.loginfo("Set Backgroud Color[255, 255, 255]");
# 读取背景颜色参数
red = rospy.get_param('/turtlesim/background_r')
green = rospy.get_param('/turtlesim/background_g')
blue = rospy.get_param('/turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/clear')
try:
clear_background = rospy.ServiceProxy('/clear', Empty)
# 请求服务调用,输入请求数据
response = clear_background()
return response
except rospy.ServiceException as e:
print("Service call failed: %s"%e)
if __name__ == "__main__":
parameter_config()
运行
cd ~/catkin_ws
roscore
rosrun turtlesim turtlesim_node
rosrun learning_parameter parameter_config.py
5、launch启动文件
传统启动节点的方法:每启动一个节点都要打开一个新的终端运行一个新的命令,当系统中的节点数量许多时,显然是很不方便的,而且命令的输入也可能会发生错误。
launch启动文件的引入:可以同时启动多个节点,并且可以自动启动ROS Master节点管理器以及实现每个节点的各种配置,为多个节点的操作提供很大的便利。http://wiki.ros.org/roslaunch/XML
1、基本介绍
< launch >
launch文件中的根元素采用< launch >标签定义,里面包含所有节点的启动配置内容
#该属性告知用户当前 launch 文件已经弃用
deprecated = "弃用声明"
< node >
启动节点
<node pkg="turtlesim" name="sim1" type="turtlesim_node"/>
- pkg:节点所在的功能包名称
- type:节点的可执行文件名称
- name:节点运行时的名称
- output:“log | screen” (可选)日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log
- respawn, required, ns, args
< param > / < rosparam > 参数
设置ROS系统运行中的参数,存储在参数服务器中。其中不同层次的参数是不一样的,在标签中时,相当于私有命名空间。
<param name="output_frame" value="odom"/>
- name:参数名
- value:参数值
加载参数文件中的多个参数:
#command="load | dump | delete" (可选,默认 load)
<rosparam file="params.yaml" command="load" ns="params" />
< arg > 参数
launch文件内部的局部变量,仅限于launch文件使用
<arg name="arg-name" default="arg-value" />
- name:参数名
- value:参数值
param设置的参数是存储在ROS参数服务器中的,而arg设置的参数仅限于launch文件中
< remap > 重映射
重映射ROS计算图资源的命名。
<remap from="/turtlebot/cmd_vel" to="/cmd_vel"/>
- from:原命名
- to:映射之后的命名
< include > 嵌套
包含其他launch文件,类似C语言中的头文件包含。
<include file="$(dirname)/other.launch" />
- file:包含的其他launch文件路径
< group > 组
- 标签可以对节点分组,具有 ns 属性,可以让节点归属某个命名空间
< arg > 参数
- 标签是用于动态传参,类似于函数的参数,可以增强launch文件的灵活性
<launch>
<arg name="xxx" default="xxx"/>
<param name="param" value="$(arg xxx)" />
</launch>
2、launch简单示例
首先创建功能包,在里面创建launch文件夹,一般launch都放在里面(可自定义文件夹名)
cd ~/catkin_ws/src
catkin_create_pkg learning_launch
简单订阅者发布者
名为simple.launch
<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" />
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
launch>
#需要编译才能识别
cd ~/catkin_ws
catkin_make
#若找不到功能包
#运行rospack profile
#一键启动
roslaunch learning_launch simple.launch
config的launch文件
在config/param.yml文件下
A: 123
B: "hello"
group:
C: 456
D: "hello"
turtlesim_parameter_config.launch文件
<launch>
<param name="/turtle_number" value="2"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<param name="turtle_name1" value="Tom"/>
<param name="turtle_name2" value="Jerry"/>
<rosparam file="$(find learning_launch)/config/param.yaml" command="load"/>
node>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen"/>
launch>
运行,可以看见节点参数的不同,不同位置显示的参数位置也不同
#回到工作空间目录运行
roslaunch learning_launch turtlesim_parameter_config.launch

remap使用
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel"/>
node>
launch>
四、通信机制进阶
API文档: http://wiki.ros.org/APIs
1、常用API
1、初始化
C++
/*
* 该函数可以解析并使用节点启动时传入的参数(通过参数设置节点名称、命名空间...)
*
* 该函数有多个重载版本,如果使用NodeHandle建议调用该版本。
* \param argc 参数个数
* \param argv 参数列表
* \param name 节点名称,需要保证其唯一性,不允许包含命名空间
* \param options 节点启动选项,被封装进了ros::init_options
*
*/
void init(int &argc, char **argv, const std::string& name, uint32_t options = 0);
// 如果要一个节点启动多个
ros::init(argc,argv,"cppserver",ros::init_options::AnonymousName);
python
"""
在ROS msater中注册节点
@param name: 节点名称,必须保证节点名称唯一,节点名称中不能使用命名空间(不能包含 '/')
@type name: str
@param anonymous: 取值为 true 时,为节点名称后缀随机编号
@type anonymous: bool
"""
def init_node(name, argv=None, anonymous=False, log_level=None, disable_rostime=False, disable_rosout=False, disable_signals=False, xmlrpc_port=0, tcpros_port=0)
2、话题和服务
/**
* 在 ROS master 注册并返回一个发布者对象,该对象可以发布消息
* 使用示例如下:
* ros::Publisher pub = handle.advertise("my_topic", 1);
* \param queue_size 等待发送给订阅者的最大消息数量
* \param latch (optional) 如果为 true,该话题发布的最后一条消息将被保存,并且后期当有订阅者连接时会将该消息发送给订阅者
* \return 调用成功时,会返回一个发布对象
*/
Publisher advertise(const std::string& topic, uint32_t queue_size, bool latch = false)
3、回旋函数
spin()和spinOnce()异同
**相同点:**二者都用于处理回调函数;
**不同点:**ros::spin() 是进入了循环执行回调函数,而 ros::spinOnce() 只会执行一次回调函数(没有循环),在 ros::spin() 后的语句不会执行到,而 ros::spinOnce() 后的语句可以执行。
4、时间
C++
//时刻
ros::init(argc,argv,"hello_time");
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败
ros::Time right_now = ros::Time::now();//将当前时刻封装成对象
ROS_INFO("当前时刻:%.2f",right_now.toSec());//获取距离 1970年01月01日 00:00:00 的秒数
ROS_INFO("当前时刻:%d",right_now.sec);//获取距离 1970年01月01日 00:00:00 的秒数
ros::Time someTime(100,100000000);// 参数1:秒数 参数2:纳秒
ROS_INFO("时刻:%.2f",someTime.toSec()); //100.10
ros::Time someTime2(100.3);//直接传入 double 类型的秒数
ROS_INFO("时刻:%.2f",someTime2.toSec()); //100.30
//持续时间
ros::Duration du(10);//持续10秒钟,参数是double类型的,以秒为单位
du.sleep();//按照指定的持续时间休眠
ROS_INFO("持续时间:%.2f",du.toSec());//将持续时间换算成秒
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
//PS: time 与 time 不可以相加运算,可以相减
ros::Rate rate(1);//指定频率
rate.sleep();
//定时器
//ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing); 默认自动启动
ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,true);//只执行一次
// ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,false,false);//需要手动启动
// timer.start();
ros::spin(); //必须 spin
python
# 获取当前时刻
right_now = rospy.Time.now()
rospy.loginfo("当前时刻:%.2f",right_now.to_sec())
rospy.loginfo("当前时刻:%.2f",right_now.to_nsec())
# 自定义时刻
some_time1 = rospy.Time(1234.567891011)
# 从时间创建对象
some_time3 = rospy.Time.from_sec(543.21) # from_sec 替换了 from_seconds
rospy.loginfo("设置时刻3:%.2f",some_time3.to_sec())
#持续时间
du = rospy.Duration(3.3)
# 设置执行频率
rate = rospy.Rate(0.5)
rate.sleep()
#定时器
rospy.Timer(rospy.Duration(1),doMsg)
# rospy.Timer(rospy.Duration(1),doMsg,True) # 只执行一次
rospy.spin()
5、其他函数
在发布实现时,一般会循环发布消息,循环的判断条件一般由节点状态来控制,C++中可以通过 ros::ok() 来判断节点状态是否正常,而 python 中则通过 rospy.is_shutdown() 来实现判断,导致节点退出的原因主要有如下几种:
- 节点接收到了关闭信息,比如常用的
ctrl + c快捷键就是关闭节点的信号; - 同名节点启动,导致现有节点退出;
- 程序中的其他部分调用了节点关闭相关的API(C++中是
ros::shutdown(),python中是rospy.signal_shutdown())
//C++
ROS_DEBUG("hello,DEBUG"); //不会输出
ROS_INFO("hello,INFO"); //默认白色字体
ROS_WARN("Hello,WARN"); //默认黄色字体
ROS_ERROR("hello,ERROR");//默认红色字体
ROS_FATAL("hello,FATAL");//默认红色字体
//python
rospy.logdebug("hello,debug") #不会输出
rospy.loginfo("hello,info") #默认白色字体
rospy.logwarn("hello,warn") #默认黄色字体
rospy.logerr("hello,error") #默认红色字体
rospy.logfatal("hello,fatal") #默认红色字体
2、自定义头文件和源文件
1、自定义头文件
在功能包下的 include/功能包名 目录下新建头文件: hello.h
#ifndef _HELLO_H
#define _HELLO_H
namespace hello_ns{
class HelloPub {
public:
void run();
};
}
#endif
在 VScode 中,为了后续包含头文件时不抛出异常,配置 .vscode 下 c_cpp_properties.json 的 includepath属性
"/home/用户/工作空间/src/功能包/include/**"
在 src 目录下新建文件hello.cpp
#include "ros/ros.h"
#include "test_pkg/hello.h"
namespace hello_ns {
void HelloPub::run(){
ROS_INFO("自定义头文件的使用....");
}
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"test_head_node");
hello_ns::HelloPub helloPub;
helloPub.run();
return 0;
}
最后进行文件的配置和运行
#取消include注释
include_directories(
include
${catkin_INCLUDE_DIRS}
)
add_executable(hello src/hello.cpp)
add_dependencies(hello ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(hello
${catkin_LIBRARIES}
)
2、自定义源文件
头文件设置和上一节相似,命名为hello1.h,配置好VS。
在 src 目录下新建文件hello1.cpp,示例内容如下:
#include "test_pkg/hello1.h"
#include "ros/ros.h"
namespace hello_ns{
void HelloPub::run(){
ROS_INFO("hello,head and src ...");
}
}
在 src 目录下新建文件 use_head.cpp,示例内容如下:
#include "test_pkg/hello1.h"
#include "ros/ros.h"
namespace hello_ns{
void HelloPub::run(){
ROS_INFO("hello,head and src ...");
}
}
头文件与源文件相关配置:
include_directories(
include
${catkin_INCLUDE_DIRS}
)
## 声明C++库
add_library(head
include/test_pkg/hello1.h
src/hello1.cpp
)
add_dependencies(head ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(head
${catkin_LIBRARIES}
)
可执行文件配置:
add_executable(use_head src/use_head.cpp)
add_dependencies(use_head ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
#此处需要添加之前设置的 head 库
target_link_libraries(use_head
head
${catkin_LIBRARIES}
)
3、python模块导入
在同一目录下导入另外的py文件,可能会报错:模块未找到。因为rosrun的工作目录时在当前工作空间中
import os
import sys
path = os.path.abspath(".")
# 核心
sys.path.insert(0,path + "/src/test_pkg/scripts")
五、ROS运行管理
1、元功能包
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
1、新建一个功能包
**2、修改package.xml **
<exec_depend>被集成的功能包exec_depend>
.....
<export>
<metapackage />
export>
3、修改 CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
PS:CMakeLists.txt 中不可以有换行。
参考文档:http://wiki.ros.org/catkin/package.xml#Metapackages
2、ROS节点重命名
#1、重定向命名空间和运行名字可分开
rosrun turtlesim turtlesim_node __ns:=/xxx __name:=tn
#2、launch的重命名
<node pkg="turtlesim" type="turtlesim_node" name="t1" ns="hello"/>
#3、两种方法代码中设置
ros::init(argc,argv,"zhangsan",ros::init_options::AnonymousName);
rospy.init_node("lisi",anonymous=True)
3、ROS话题名称
在 ROS 中节点终端,不同的节点之间通信都依赖于话题,话题名称也可能出现重复的情况,这种情况下,系统虽然不会抛出异常,但是可能导致订阅的消息非预期的,从而导致节点运行异常。这种情况下需要将两个节点的话题名称由相同修改为不同。
话题种类
- 全局(参数名称直接参考ROS系统,与节点命名空间平级)
- 相对(参数名称参考的是节点的命名空间,与节点名称平级)
- 私有(参数名称参考节点名称,是节点名称的子级)
在ROS中提供了一个比较好用的键盘控制功能包: ros-noetic-teleop-twist-keyboard,该功能包,可以控制机器人的运动,作用类似于乌龟的键盘控制节点。如果没有,则sudo apt install ros-noetic-teleop-twist-keyboard进行安装,然后执行: rosrun teleop_twist_keyboard teleop_twist_keyboard.py
#1、通过rosrun重命名
rosrun名称重映射语法: rorun 包名 节点名 话题名:=新话题名称
#2、launch 文件设置话题重映射语法
<node pkg="xxx" type="xxx" name="xxx">
<remap from="原话题" to="新话题" />
</node>
#3、在代码中进行编写
#C++编写
#全局,/chatter
ros::Publisher pub = nh.advertise<std_msgs::String>("/chatter",1000);
#相对,xxx/chatter
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",1000);
#私有,/xxx/hello/chatter
ros::NodeHandle nh("~");
ros::Publisher pub = nh.advertise<std_msgs::String>("chatter",1000);
#python编写
pub = rospy.Publisher("/chatter",String,queue_size=1000)
pub = rospy.Publisher("chatter",String,queue_size=1000)
pub = rospy.Publisher("~chatter",String,queue_size=1000)
4、ROS参数名设置
关于参数重名的处理,没有重映射实现,为了尽量的避免参数重名,都是使用为参数名添加前缀的方式,实现类似于话题名称,有全局、相对、和私有三种类型之分。
#命令行设置
rosrun 包名 节点名称 _参数名:=参数值
#launch文件设置
#输出 /p1
# /t1/p1
<launch>
<param name="p1" value="100" />
<node pkg="turtlesim" type="turtlesim_node" name="t1">
<param name="p2" value="100" />
</node>
</launch>
#代码设置
#C++
ros::param::set("/set_A",100); #全局,和命名空间以及节点名称无关
ros::param::set("set_B",100); #相对,参考命名空间
ros::param::set("~set_C",100); #私有,参考命名空间与节点名称
#python
rospy.set_param("/py_A",100) #全局,和命名空间以及节点名称无关
rospy.set_param("py_B",100) #相对,参考命名空间
rospy.set_param("~py_C",100) #私有,参考命名空间与节点名称
5、ROS分布式
ROS是一个分布式计算环境。一个运行中的ROS系统可以包含分布在多台计算机上多个节点。根据系统的配置方式,任何节点可能随时需要与任何其他节点进行通信。
1.准备
先要保证不同计算机处于同一网络中,最好分别设置固定IP,如果为虚拟机,需要将网络适配器改为桥接模式;
2.配置文件修改
分别修改不同计算机的 /etc/hosts 文件,在该文件中加入对方的IP地址和计算机名:
#主机端:
从机的IP 从机计算机名
#从机端:
主机的IP 主机算机名
设置完毕,可以通过 ping 命令测试网络通信是否正常。
#IP地址查看
ifconfig
#计算机名称查看
hostname
3.配置主机IP
配置主机的 IP 地址
~/.bashrc 追加
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=主机IP
4.配置从机IP
配置从机的 IP 地址,从机可以有多台,每台都做如下设置:
~/.bashrc 追加
export ROS_MASTER_URI=http://主机IP:11311
export ROS_HOSTNAME=从机IP
完毕后即可分布式通信
六、ROS常用组件
参考: http://wiki.ros.org/tf2
1、TF坐标变换
创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf2 tf2_ros tf2_geometry_msgs std_msgs geometry_msgs
1、坐标msg消息
订阅发布模型中数据载体 msg 是一个重要实现,首先需要了解一下,在坐标转换实现中常用的 msg:
geometry_msgs/TransformStamped和geometry_msgs/PointStamped。前者用于传输坐标系相关位置信息,后者用于传输某个坐标系内坐标点的信息。在坐标变换中,频繁的需要使用到坐标系的相对关系以及坐标点信息。
2、静态坐标建立
使用命令行设置静态坐标变换(推荐)
rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度 父级坐标系 子级坐标系
1、C++实现
发布方
#include "ros/ros.h"
#include "tf2_ros/static_transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"static_brocast");
// 3.创建静态坐标转换广播器
tf2_ros::StaticTransformBroadcaster broadcaster;
// 4.创建坐标系信息
geometry_msgs::TransformStamped ts;
//----设置头信息
ts.header.seq = 100;
ts.header.stamp = ros::Time::now();
ts.header.frame_id = "base_link";
//----设置子级坐标系
ts.child_frame_id = "laser";
//----设置子级相对于父级的偏移量
ts.transform.translation.x = 0.2;
ts.transform.translation.y = 0.0;
ts.transform.translation.z = 0.5;
//----设置四元数:将 欧拉角数据转换成四元数
tf2::Quaternion qtn;
qtn.setRPY(0,0,0);
ts.transform.rotation.x = qtn.getX();
ts.transform.rotation.y = qtn.getY();
ts.transform.rotation.z = qtn.getZ();
ts.transform.rotation.w = qtn.getW();
// 5.广播器发布坐标系信息
broadcaster.sendTransform(ts);
ros::spin();
return 0;
}
订阅者
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h" //注意: 调用 transform 必须包含该头文件
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"tf_sub");
ros::NodeHandle nh;
// 3.创建 TF 订阅节点
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
ros::Rate r(1);
while (ros::ok())
{
// 4.生成一个坐标点(相对于子级坐标系)
geometry_msgs::PointStamped point_laser;
point_laser.header.frame_id = "laser";
point_laser.header.stamp = ros::Time::now();
point_laser.point.x = 1;
point_laser.point.y = 2;
point_laser.point.z = 7.3;
// 5.转换坐标点(相对于父级坐标系)
//新建一个坐标点,用于接收转换结果
//--------------使用 try 语句或休眠,否则可能由于缓存接收延迟而导致坐标转换失败------------------------
try
{
geometry_msgs::PointStamped point_base;
point_base = buffer.transform(point_laser,"base_link");
ROS_INFO("转换后的数据:(%.2f,%.2f,%.2f),参考的坐标系是:",point_base.point.x,point_base.point.y,point_base.point.z,point_base.header.frame_id.c_str());
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("程序异常.....");
}
r.sleep();
ros::spinOnce();
}
return 0;
}
2、python实现
发布方
#! /usr/bin/env python
# 1.导包
import rospy
import tf2_ros
import tf
from geometry_msgs.msg import TransformStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_tf_pub_p")
# 3.创建 静态坐标广播器
broadcaster = tf2_ros.StaticTransformBroadcaster()
# 4.创建并组织被广播的消息
tfs = TransformStamped()
# --- 头信息
tfs.header.frame_id = "world"
tfs.header.stamp = rospy.Time.now()
tfs.header.seq = 101
# --- 子坐标系
tfs.child_frame_id = "radar"
# --- 坐标系相对信息
# ------ 偏移量
tfs.transform.translation.x = 0.2
tfs.transform.translation.y = 0.0
tfs.transform.translation.z = 0.5
# ------ 四元数
qtn = tf.transformations.quaternion_from_euler(0,0,0)
tfs.transform.rotation.x = qtn[0]
tfs.transform.rotation.y = qtn[1]
tfs.transform.rotation.z = qtn[2]
tfs.transform.rotation.w = qtn[3]
# 5.广播器发送消息
broadcaster.sendTransform(tfs)
# 6.spin
rospy.spin()
订阅者
#! /usr/bin/env python
# 1.导包
import rospy
import tf2_ros
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_sub_tf_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 4.创建一个 radar 坐标系中的坐标点
point_source = PointStamped()
point_source.header.frame_id = "radar"
point_source.header.stamp = rospy.Time.now()
point_source.point.x = 10
point_source.point.y = 2
point_source.point.z = 3
try:
#5.调研订阅对象的 API 将 4 中的点坐标转换成相对于 world 的坐标
point_target = buffer.transform(point_source,"world")
rospy.loginfo("转换结果:x = %.2f, y = %.2f, z = %.2f",
point_target.point.x,
point_target.point.y,
point_target.point.z)
except Exception as e:
rospy.logerr("异常:%s",e)
#6.spin
rate.sleep()
3、动态坐标建立
1、C++
发布方
// 1.包含头文件
#include "ros/ros.h"
#include "turtlesim/Pose.h"
#include "tf2_ros/transform_broadcaster.h"
#include "geometry_msgs/TransformStamped.h"
#include "tf2/LinearMath/Quaternion.h"
void doPose(const turtlesim::Pose::ConstPtr& pose){
// 5-1.创建 TF 广播器
static tf2_ros::TransformBroadcaster broadcaster;
// 5-2.创建 广播的数据(通过 pose 设置)
geometry_msgs::TransformStamped tfs;
// |----头设置
tfs.header.frame_id = "world";
tfs.header.stamp = ros::Time::now();
// |----坐标系 ID
tfs.child_frame_id = "turtle1";
// |----坐标系相对信息设置
tfs.transform.translation.x = pose->x;
tfs.transform.translation.y = pose->y;
tfs.transform.translation.z = 0.0; // 二维实现,pose 中没有z,z 是 0
// |--------- 四元数设置
tf2::Quaternion qtn;
qtn.setRPY(0,0,pose->theta);
tfs.transform.rotation.x = qtn.getX();
tfs.transform.rotation.y = qtn.getY();
tfs.transform.rotation.z = qtn.getZ();
tfs.transform.rotation.w = qtn.getW();
// 5-3.广播器发布数据
broadcaster.sendTransform(tfs);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"dynamic_tf_pub");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建订阅对象
//turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度
ros::Subscriber sub = nh.subscribe<turtlesim::Pose>("/turtle1/pose",1000,doPose);
// 5.回调函数处理订阅到的数据(实现TF广播)
// 6.spin
ros::spin();
return 0;
}
订阅方
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2_ros/buffer.h"
#include "geometry_msgs/PointStamped.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h" //注意: 调用 transform 必须包含该头文件
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"dynamic_tf_sub");
ros::NodeHandle nh;
// 3.创建 TF 订阅节点
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
ros::Rate r(1);
while (ros::ok())
{
// 4.生成一个坐标点(相对于子级坐标系)
geometry_msgs::PointStamped point_laser;
point_laser.header.frame_id = "turtle1";
point_laser.header.stamp = ros::Time();
point_laser.point.x = 1;
point_laser.point.y = 1;
point_laser.point.z = 0;
// 5.转换坐标点(相对于父级坐标系)
//新建一个坐标点,用于接收转换结果
//--------------使用 try 语句或休眠,否则可能由于缓存接收延迟而导致坐标转换失败------------------------
try
{
geometry_msgs::PointStamped point_base;
point_base = buffer.transform(point_laser,"world");
ROS_INFO("坐标点相对于 world 的坐标为:(%.2f,%.2f,%.2f)",point_base.point.x,point_base.point.y,point_base.point.z);
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("程序异常:%s",e.what());
}
r.sleep();
ros::spinOnce();
}
return 0;
}
2、python
发布方
#! /usr/bin/env python
# 1.导包
import rospy
import tf2_ros
import tf
from turtlesim.msg import Pose
from geometry_msgs.msg import TransformStamped
# 4.回调函数处理
def doPose(pose):
# 4-1.创建 TF 广播器
broadcaster = tf2_ros.TransformBroadcaster()
# 4-2.创建 广播的数据(通过 pose 设置)
tfs = TransformStamped()
tfs.header.frame_id = "world"
tfs.header.stamp = rospy.Time.now()
tfs.child_frame_id = "turtle1"
tfs.transform.translation.x = pose.x
tfs.transform.translation.y = pose.y
tfs.transform.translation.z = 0.0
qtn = tf.transformations.quaternion_from_euler(0,0,pose.theta)
tfs.transform.rotation.x = qtn[0]
tfs.transform.rotation.y = qtn[1]
tfs.transform.rotation.z = qtn[2]
tfs.transform.rotation.w = qtn[3]
# 4-3.广播器发布数据
broadcaster.sendTransform(tfs)
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("dynamic_tf_pub_p")
# 3.订阅 /turtle1/pose 话题消息
sub = rospy.Subscriber("/turtle1/pose",Pose,doPose)
# 4.回调函数处理
# 4-1.创建 TF 广播器
# 4-2.创建 广播的数据(通过 pose 设置)
# 4-3.广播器发布数据
# 5.spin
rospy.spin()
订阅方
#! /usr/bin/env python
# 1.导包
import rospy
import tf2_ros
# 不要使用 geometry_msgs,需要使用 tf2 内置的消息类型
from tf2_geometry_msgs import PointStamped
# from geometry_msgs.msg import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("static_sub_tf_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
# 4.创建一个 radar 坐标系中的坐标点
point_source = PointStamped()
point_source.header.frame_id = "turtle1"
point_source.header.stamp = rospy.Time.now()
point_source.point.x = 10
point_source.point.y = 2
point_source.point.z = 3
try:
#5.调研订阅对象的 API 将 4 中的点坐标转换成相对于 world 的坐标
point_target = buffer.transform(point_source,"world",rospy.Duration(1))
rospy.loginfo("转换结果:x = %.2f, y = %.2f, z = %.2f",
point_target.point.x,
point_target.point.y,
point_target.point.z)
except Exception as e:
rospy.logerr("异常:%s",e)
#6.spin
rate.sleep()
最后启动即可监听到动态坐标
#启动海龟节点
rosrun turtlesim turtlesim_node
#启动海龟控制节点
rosrun turtlesim turtle_teleop_key
4、多坐标点变换
发布方
为了方便,使用静态坐标变换发布
<launch>
<node pkg="tf2_ros" type="static_transform_publisher" name="son1" args="0.2 0.8 0.3 0 0 0 /world /son1" output="screen" />
<node pkg="tf2_ros" type="static_transform_publisher" name="son2" args="0.5 0 0 0 0 0 /world /son2" output="screen" />
launch>
订阅方
c++实现
//1.包含头文件
#include "ros/ros.h"
#include "tf2_ros/transform_listener.h"
#include "tf2/LinearMath/Quaternion.h"
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"
#include "geometry_msgs/TransformStamped.h"
#include "geometry_msgs/PointStamped.h"
int main(int argc, char *argv[])
{ setlocale(LC_ALL,"");
// 2.初始化 ros 节点
ros::init(argc,argv,"sub_frames");
// 3.创建 ros 句柄
ros::NodeHandle nh;
// 4.创建 TF 订阅对象
tf2_ros::Buffer buffer;
tf2_ros::TransformListener listener(buffer);
// 5.解析订阅信息中获取 son1 坐标系原点在 son2 中的坐标
ros::Rate r(1);
while (ros::ok())
{
try
{
// 解析 son1 中的点相对于 son2 的坐标
geometry_msgs::TransformStamped tfs = buffer.lookupTransform("son2","son1",ros::Time(0));
ROS_INFO("Son1 相对于 Son2 的坐标关系:父坐标系ID=%s",tfs.header.frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:子坐标系ID=%s",tfs.child_frame_id.c_str());
ROS_INFO("Son1 相对于 Son2 的坐标关系:x=%.2f,y=%.2f,z=%.2f",
tfs.transform.translation.x,
tfs.transform.translation.y,
tfs.transform.translation.z
);
// 坐标点解析
geometry_msgs::PointStamped ps;
ps.header.frame_id = "son1";
ps.header.stamp = ros::Time::now();
ps.point.x = 1.0;
ps.point.y = 2.0;
ps.point.z = 3.0;
geometry_msgs::PointStamped psAtSon2;
psAtSon2 = buffer.transform(ps,"son2");
ROS_INFO("在 Son2 中的坐标:x=%.2f,y=%.2f,z=%.2f",
psAtSon2.point.x,
psAtSon2.point.y,
psAtSon2.point.z
);
}
catch(const std::exception& e)
{
// std::cerr << e.what() << '\n';
ROS_INFO("异常信息:%s",e.what());
}
r.sleep();
// 6.spin
ros::spinOnce();
}
return 0;
}
python实现
#!/usr/bin/env python
# 1.导包
import rospy
import tf2_ros
from geometry_msgs.msg import TransformStamped
from tf2_geometry_msgs import PointStamped
if __name__ == "__main__":
# 2.初始化 ROS 节点
rospy.init_node("frames_sub_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
rate = rospy.Rate(1)
while not rospy.is_shutdown():
try:
# 4.调用 API 求出 son1 相对于 son2 的坐标关系
#lookup_transform(self, target_frame, source_frame, time, timeout=rospy.Duration(0.0)):
tfs = buffer.lookup_transform("son2","son1",rospy.Time(0))
rospy.loginfo("son1 与 son2 相对关系:")
rospy.loginfo("父级坐标系:%s",tfs.header.frame_id)
rospy.loginfo("子级坐标系:%s",tfs.child_frame_id)
rospy.loginfo("相对坐标:x=%.2f, y=%.2f, z=%.2f",
tfs.transform.translation.x,
tfs.transform.translation.y,
tfs.transform.translation.z,
)
# 5.创建一依赖于 son1 的坐标点,调用 API 求出该点在 son2 中的坐标
point_source = PointStamped()
point_source.header.frame_id = "son1"
point_source.header.stamp = rospy.Time.now()
point_source.point.x = 1
point_source.point.y = 1
point_source.point.z = 1
point_target = buffer.transform(point_source,"son2",rospy.Duration(0.5))
rospy.loginfo("point_target 所属的坐标系:%s",point_target.header.frame_id)
rospy.loginfo("坐标点相对于 son2 的坐标:(%.2f,%.2f,%.2f)",
point_target.point.x,
point_target.point.y,
point_target.point.z
)
except Exception as e:
rospy.logerr("错误提示:%s",e)
rate.sleep()
# 6.spin
# rospy.spin()
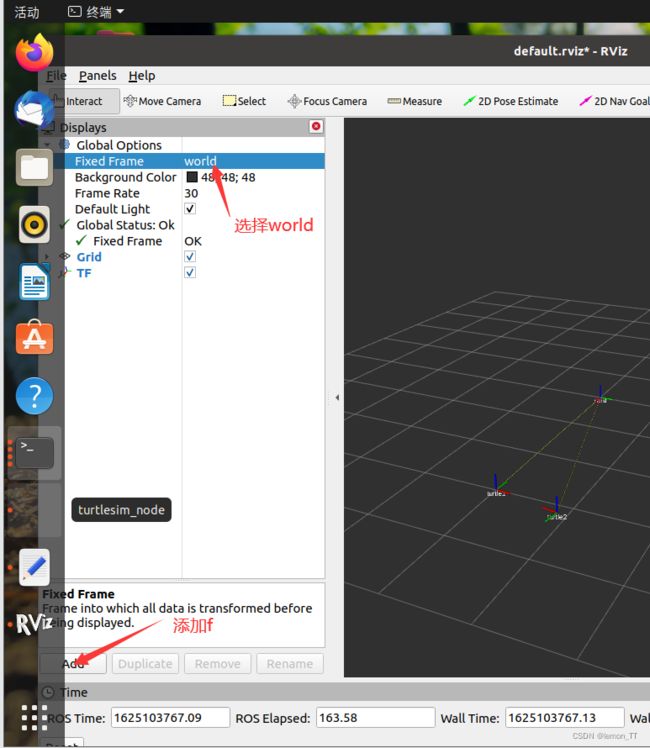
5、坐标位置查看
可视化
启动后输入rviz,可进入可视化界面,按要求添加即可观察
命令行
#没安装进行安装
sudo apt install ros-noetic-tf2-tools
#生成当前目录的pdf文件
rosrun tf2_tools view_frames.py
6、海龟跟随实战
这里使用python编写,C++和python原理一样
服务客户端(生成新海龟)
#! /usr/bin/env python
"""
调用 service 服务在窗体指定位置生成一只乌龟
流程:
1.导包
2.初始化 ros 节点
3.创建服务客户端
4.等待服务启动
5.创建请求数据
6.发送请求并处理响应
"""
#1.导包
import rospy
from turtlesim.srv import Spawn, SpawnRequest, SpawnResponse
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("turtle_spawn_p")
# 3.创建服务客户端
client = rospy.ServiceProxy("/spawn",Spawn)
# 4.等待服务启动
client.wait_for_service()
# 5.创建请求数据
req = SpawnRequest()
req.x = 1.0
req.y = 1.0
req.theta = 3.14
req.name = "turtle2"
# 6.发送请求并处理响应
try:
response = client.call(req)
rospy.loginfo("乌龟创建成功,名字是:%s",response.name)
except Exception as e:
rospy.loginfo("服务调用失败....")
发布方(发布两只乌龟坐标信息)
#! /usr/bin/env python
"""
该文件实现:需要订阅 turtle1 和 turtle2 的 pose,然后广播相对 world 的坐标系信息
注意: 订阅的两只 turtle,除了命名空间(turtle1 和 turtle2)不同外,
其他的话题名称和实现逻辑都是一样的,
所以我们可以将所需的命名空间通过 args 动态传入
实现流程:
1.导包
2.初始化 ros 节点
3.解析传入的命名空间
4.创建订阅对象
5.回调函数处理订阅的 pose 信息
5-1.创建 TF 广播器
5-2.将 pose 信息转换成 TransFormStamped
5-3.发布
6.spin
"""
# 1.导包
import rospy
import sys
from turtlesim.msg import Pose
from geometry_msgs.msg import TransformStamped
import tf2_ros
import tf_conversions
turtle_name = ""
def doPose(pose):
# rospy.loginfo("x = %.2f",pose.x)
#1.创建坐标系广播器
broadcaster = tf2_ros.TransformBroadcaster()
#2.将 pose 信息转换成 TransFormStamped
tfs = TransformStamped()
tfs.header.frame_id = "world"
tfs.header.stamp = rospy.Time.now()
tfs.child_frame_id = turtle_name
tfs.transform.translation.x = pose.x
tfs.transform.translation.y = pose.y
tfs.transform.translation.z = 0.0
qtn = tf_conversions.transformations.quaternion_from_euler(0, 0, pose.theta)
tfs.transform.rotation.x = qtn[0]
tfs.transform.rotation.y = qtn[1]
tfs.transform.rotation.z = qtn[2]
tfs.transform.rotation.w = qtn[3]
#3.广播器发布 tfs
broadcaster.sendTransform(tfs)
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("sub_tfs_p")
# 3.解析传入的命名空间
rospy.loginfo("-------------------------------%d",len(sys.argv))
if len(sys.argv) < 2:
rospy.loginfo("请传入参数:乌龟的命名空间")
else:
turtle_name = sys.argv[1]
rospy.loginfo("///乌龟:%s",turtle_name)
rospy.Subscriber(turtle_name + "/pose",Pose,doPose)
# 4.创建订阅对象
# 5.回调函数处理订阅的 pose 信息
# 5-1.创建 TF 广播器
# 5-2.将 pose 信息转换成 TransFormStamped
# 5-3.发布
# 6.spin
rospy.spin()
订阅方(解析坐标信息并生成速度信息)
#! /usr/bin/env python
"""
订阅 turtle1 和 turtle2 的 TF 广播信息,查找并转换时间最近的 TF 信息
将 turtle1 转换成相对 turtle2 的坐标,在计算线速度和角速度并发布
实现流程:
1.导包
2.初始化 ros 节点
3.创建 TF 订阅对象
4.处理订阅到的 TF
4-1.查找坐标系的相对关系
4-2.生成速度信息,然后发布
"""
# 1.导包
import rospy
import tf2_ros
from geometry_msgs.msg import TransformStamped, Twist
import math
if __name__ == "__main__":
# 2.初始化 ros 节点
rospy.init_node("sub_tfs_p")
# 3.创建 TF 订阅对象
buffer = tf2_ros.Buffer()
listener = tf2_ros.TransformListener(buffer)
# 4.处理订阅到的 TF
rate = rospy.Rate(10)
# 创建速度发布对象
pub = rospy.Publisher("/turtle2/cmd_vel",Twist,queue_size=1000)
while not rospy.is_shutdown():
rate.sleep()
try:
#def lookup_transform(self, target_frame, source_frame, time, timeout=rospy.Duration(0.0)):
trans = buffer.lookup_transform("turtle2","turtle1",rospy.Time(0))
# rospy.loginfo("相对坐标:(%.2f,%.2f,%.2f)",
# trans.transform.translation.x,
# trans.transform.translation.y,
# trans.transform.translation.z
# )
# 根据转变后的坐标计算出速度和角速度信息
twist = Twist()
# 间距 = x^2 + y^2 然后开方
twist.linear.x = 0.5 * math.sqrt(math.pow(trans.transform.translation.x,2) + math.pow(trans.transform.translation.y,2))
twist.angular.z = 4 * math.atan2(trans.transform.translation.y, trans.transform.translation.x)
pub.publish(twist)
except Exception as e:
rospy.logwarn("警告:%s",e)
运行(launch文件)
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="turtle1" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="key_control" output="screen"/>
<node pkg="learning_tf" type="generate_new.py" name="turtle2" output="screen"/>
<node pkg="learning_tf" type="demo04_pub.py" name="tf1_pub" args="turtle1" output="screen"/>
<node pkg="learning_tf" type="demo04_pub.py" name="tf2_pub" args="turtle2" output="screen"/>
<node pkg="learning_tf" type="demo04_sub.py" name="tf_sub" output="screen"/>
launch>
2、rosbag
在ROS中关于数据的留存以及读取实现
命令行
#录制文件
rosbag record -a -O 目标文件
#查看文件
rosbag info 文件名
#回放文件
rosbag play 文件名
代码运行
1、C++实现
1.写 bag
#include "ros/ros.h"
#include "rosbag/bag.h"
#include "std_msgs/String.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"bag_write");
ros::NodeHandle nh;
//创建bag对象
rosbag::Bag bag;
//打开
bag.open("test.bag",rosbag::BagMode::Write);
//写
std_msgs::String msg;
msg.data = "hello world";
bag.write("/chatter",ros::Time::now(),msg);
bag.write("/chatter",ros::Time::now(),msg);
bag.write("/chatter",ros::Time::now(),msg);
bag.write("/chatter",ros::Time::now(),msg);
//关闭
bag.close();
return 0;
}
2.读bag
#include "ros/ros.h"
#include "rosbag/bag.h"
#include "rosbag/view.h"
#include "std_msgs/String.h"
#include "std_msgs/Int32.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"bag_read");
ros::NodeHandle nh;
//创建 bag 对象
rosbag::Bag bag;
//打开 bag 文件
bag.open("test.bag",rosbag::BagMode::Read);
//读数据
for (rosbag::MessageInstance const m : rosbag::View(bag))
{
std_msgs::String::ConstPtr p = m.instantiate<std_msgs::String>();
if(p != nullptr){
ROS_INFO("读取的数据:%s",p->data.c_str());
}
}
//关闭文件流
bag.close();
return 0;
}
2、python实现
1.写 bag
#! /usr/bin/env python
import rospy
import rosbag
from std_msgs.msg import String
if __name__ == "__main__":
#初始化节点
rospy.init_node("w_bag_p")
# 创建 rosbag 对象
bag = rosbag.Bag("test.bag",'w')
# 写数据
s = String()
s.data= "hahahaha"
bag.write("chatter",s)
bag.write("chatter",s)
bag.write("chatter",s)
# 关闭流
bag.close()
2.读bag
#! /usr/bin/env python
import rospy
import rosbag
from std_msgs.msg import String
if __name__ == "__main__":
#初始化节点
rospy.init_node("w_bag_p")
# 创建 rosbag 对象
bag = rosbag.Bag("test.bag",'r')
# 读数据
bagMessage = bag.read_messages("chatter")
for topic,msg,t in bagMessage:
rospy.loginfo("%s,%s,%s",topic,msg,t)
# 关闭流
bag.close()
1、简单介绍与使用
#这里因为ubuntu20没有python命令,所以我复制了/usr/bin中的python3变成python
roslaunch turtle_tf turtle_tf_demo.launch
#这里可能会遇到bug
#TypeError: cannot use a string pattern on a bytes-like object
#sudo gedit /opt/ros/noetic/lib/tf/view_frames 修改89行
#m = r.search(str(vstr))
#文件会保存在当前目录下
rosrun turtlesim turtle_teleop_key
#坐标系命令行工具
rosrun tf tf_echo turtle1 turtle2
#可视化
rosrun rviz rviz -d `rospack find turtle_tf` /rviz/turtle_rviz.rviz
2、广播与监听编程实现
如何实现一个tf广播器
- 定义TF广播器(TransformBroadcaster)
- 创建坐标变换值;
- 发布坐标变换(sendTransform)
如何实现一个TF监听器
- 定义TF监听器;(TransformListener)
- 查找坐标变换;(waitFor Transform、lookupTransform)
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf2 tf2_ros tf2_geometry_msgs std_msgs geometry_msgs
这里有点问题
3、可视化工具
rqt
rqt的启动方式有两种:
- 方式1:
rqt - 方式2:
rosrun rqt_gui rqt_gui
rqt_graph:计算图可视化工具
rqt_console:输出日志信息
rqt_plot:数据绘图工具
rqt_image_view:图像渲染工具
rqt_bag:录制和重放 bag 文件
Rviz:三维可视化工具
GazeBo:三维物理仿真平台
七、机器人系统仿真
1、概述
通过计算机对实体机器人系统进行模拟的技术,在 ROS 中,仿真实现涉及的内容主要有三:对机器人建模(URDF)、创建仿真环境(Gazebo)以及感知环境(Rviz)等系统性实现。
URDF是 Unified Robot Description Format 的首字母缩写,直译为统一(标准化)机器人描述格式,可以以一种 XML 的方式描述机器人的部分结构,比如底盘、摄像头、激光雷达、机械臂以及不同关节的自由度…该文件可以被 C++ 内置的解释器转换成可视化的机器人模型,是 ROS 中实现机器人仿真的重要组件。
RViz 是 ROS Visualization Tool 的首字母缩写,直译为ROS的三维可视化工具。它的主要目的是以三维方式显示ROS消息,可以将 数据进行可视化表达。例如:可以显示机器人模型,可以无需编程就能表达激光测距仪(LRF)传感器中的传感 器到障碍物的距离,RealSense、Kinect或Xtion等三维距离传感器的点云数据(PCD, Point Cloud Data),从相机获取的图像值等。
Gazebo是一款3D动态模拟器,用于显示机器人模型并创建仿真环境,能够在复杂的室内和室外环境中准确有效地模拟机器人。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。
2、URDF集成Rviz基本流程
实现流程:
- 准备:新建功能包,导入依赖
- 核心:编写 urdf 文件
- 核心:在 launch 文件集成 URDF 与 Rviz
- 在 Rviz 中显示机器人模型
1.创建功能包,导入依赖
创建一个新的功能包,名称自定义,导入依赖包:urdf与xacro
在当前功能包下,再新建几个目录:
urdf: 存储 urdf 文件的目录
meshes:机器人模型渲染文件(暂不使用)
config: 配置文件
launch: 存储 launch 启动文件
2.编写 URDF 文件
新建一个子级文件夹:urdf(可选),文件夹中添加一个demo01.urdf文件,复制如下内容:
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
geometry>
visual>
link>
robot>
3.在 launch 文件中集成 URDF 与 Rviz
在launch目录下,新建一个 launch 文件,该 launch 文件需要启动 Rviz,并导入 urdf 文件,Rviz 启动后可以自动载入解析urdf文件,并显示机器人模型
<launch>
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/demo01.urdf.urdf" />
<node pkg="rviz" type="rviz" name="rviz" />
launch>
4.在 Rviz 中显示机器人模型

5.优化 rviz 启动
重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行步骤4的操作,为了方便使用,需要保存配置,在file->save config as保存在之前的config文件夹中。最后在launch文件中添加即可。
<launch>
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find 报名)/config/rviz/show_mycar.rviz" />
launch>
3、URDF语法学习
https://wiki.ros.org/urdf/XML
robot标签
- name: 指定机器人模型的名称
link标签
urdf 中的 link 标签用于描述机器人某个部件(也即刚体部分)的外观和物理属性。比如: 机器人底座、轮子、激光雷达、摄像头…每一个部件都对应一个 link, 在 link 标签内,可以设计该部件的形状、尺寸、颜色、惯性矩阵、碰撞参数等一系列属性

-
name:为连杆命名
- visual —> 描述外观(对应的数据是可视的)
- geometry 设置连杆的形状
- 标签1: box(盒状)
- 属性:size=长(x) 宽(y) 高(z)
- 标签2: cylinder(圆柱)
- 属性:radius=半径 length=高度
- 标签3: sphere(球体)
- 属性:radius=半径
- 标签4: mesh(为连杆添加皮肤)
- 属性: filename=资源路径(格式:package:文件)
- 标签1: box(盒状)
- origin 设置偏移量与倾斜弧度
- 属性1: xyz=x偏移 y便宜 z偏移
- 属性2: rpy=x翻滚 y俯仰 z偏航 (单位是弧度)
- metrial 设置材料属性(颜色)
- 属性: name
- 标签: color
- 属性: rgba=红绿蓝权重值与透明度 (每个权重值以及透明度取值[0,1])
- geometry 设置连杆的形状
- collision —> 连杆的碰撞属性
- Inertial —> 连杆的惯性矩阵
- visual —> 描述外观(对应的数据是可视的)
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<mesh filename="package://urdf01_rviz/meshes/autolabor_mini.stl"/>
geometry>
<origin xyz="0 0 0" rpy="1.57 0 0" />
<material name="black">
<color rgba="0.7 0.5 0 0.5" />
material>
visual>
link>
robot>
joint
urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限,机器人的两个部件(分别称之为 parent link 与 child link)以"关节"的形式相连接,不同的关节有不同的运动形式: 旋转、滑动、固定、旋转速度、旋转角度限制…,比如:安装在底座上的轮子可以360度旋转,而摄像头则可能是完全固定在底座上。

- name —> 为关节命名
- type —> 关节运动形式
- continuous: 旋转关节,可以绕单轴无限旋转
- revolute: 旋转关节,类似于 continues,但是有旋转角度限制
- prismatic: 滑动关节,沿某一轴线移动的关节,有位置极限
- planer: 平面关节,允许在平面正交方向上平移或旋转
- floating: 浮动关节,允许进行平移、旋转运动
- fixed: 固定关节,不允许运动的特殊关节
子级标签
-
parent(必需的)
parent link的名字是一个强制的属性:
- link:父级连杆的名字,是这个link在机器人结构树中的名字。
-
child(必需的)
child link的名字是一个强制的属性:
- link:子级连杆的名字,是这个link在机器人结构树中的名字。
-
origin
- 属性: xyz=各轴线上的偏移量 rpy=各轴线上的偏移弧度。
-
axis
- 属性: xyz用于设置围绕哪个关节轴运动。
实例
创建demo03_joint.urdf
<robot name="mycar">
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="0.001" />
geometry>
visual>
link>
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="blue">
<color rgba="0 0 1.0 0.5" />
material>
visual>
link>
<link name="camera">
<visual>
<geometry>
<box size="0.02 0.05 0.05" />
geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="red">
<color rgba="1 0 0 0.5" />
material>
visual>
link>
<joint name="link2foot" type="fixed">
<parent link="base_footprint"/>
<child link="base_link" />
<origin xyz="0 0 0.075" rpy="0 0 0" />
joint>
<joint name="camera2baselink" type="continuous">
<parent link="base_link"/>
<child link="camera" />
<origin xyz="0.2 0 0.075" rpy="0 0 0" />
<axis xyz="0 0 1" />
joint>
robot>
创建demo03_joint.launch
<launch>
<param name="robot_description" textfile="$(find urdf01_rviz)/urdf/urdf/demo03_joint.urdf" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz"/>
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" />
launch>
URDF工具
在 ROS 中,提供了一些工具来方便 URDF 文件的编写,比如在文件所在路径运行:
#检查复杂的 urdf 文件是否存在语法问题
check_urdf xxx.urdf
#查看 urdf 模型结构,显示不同 link 的层级关系
urdf_to_graphiz xxx.urdf
#查看生成的pdf
evince xxx.pdf
工具之前,首先需要安装,安装命令:sudo apt install liburdfdom-tools
4、URDF之xacro
Xacro 是 XML Macros 的缩写,Xacro 是一种 XML 宏语言,是可编程的 XML。通过封装固定的逻辑,将逻辑中需要的可变的数据以参数的方式暴露出去,从而提高代码复用率以及程序的安全性。
参考文档:http://wiki.ros.org/xacro
1、快速体验
在功能包下的urdf->xacro目录下新建demo01_urdf.xacro
<robot name="mycar" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.0015" />
<xacro:property name="PI" value="3.1415927" />
<xacro:property name="base_link_length" value="0.08" />
<xacro:property name="lidi_space" value="0.015" />
<xacro:macro name="wheel_func" params="wheel_name flag" >
<link name="${wheel_name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
geometry>
<origin xyz="0 0 0" rpy="${PI / 2} 0 0" />
<material name="wheel_color">
<color rgba="0 0 0 0.3" />
material>
visual>
link>
<joint name="${wheel_name}2link" type="continuous">
<parent link="base_link" />
<child link="${wheel_name}_wheel" />
<origin xyz="0 ${0.1 * flag} ${(base_link_length / 2 + lidi_space - wheel_radius) * -1}" rpy="0 0 0" />
<axis xyz="0 1 0" />
joint>
xacro:macro>
<xacro:wheel_func wheel_name="left" flag="1" />
<xacro:wheel_func wheel_name="right" flag="-1" />
robot>
最后命令行进入 xacro文件 所属目录,执行:rosrun xacro xacro xxx.xacro > xxx.urdf, 会将 xacro 文件解析为 urdf 文件
2、xacro语法学习
属性与算数运算
用于封装 URDF 中的一些字段
<xacro:property name="xxxx" value="yyyy" />
${属性名称}
${数学表达式}
${PI / 2}
宏
类似于函数实现,提高代码复用率,优化代码结构,提高安全性
<xacro:macro name="宏名称" params="参数列表(多参数之间使用空格分隔)">
.....
参数调用格式: ${参数名}
xacro:macro>
<xacro:宏名称 参数1=xxx 参数2=xxx/>
文件包含
机器人由多部件组成,不同部件可能封装为单独的 xacro 文件,最后再将不同的文件集成,组合为完整机器人
<robot name="xxx" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="my_base.xacro" />
<xacro:include filename="my_camera.xacro" />
<xacro:include filename="my_laser.xacro" />
....
robot>
3、xacro模型实现
在xacro文件中
<robot name="my_base" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="PI" value="3.141"/>
<material name="black">
<color rgba="0.0 0.0 0.0 1.0" />
material>
<xacro:property name="base_footprint_radius" value="0.001" />
<xacro:property name="base_link_radius" value="0.1" />
<xacro:property name="base_link_length" value="0.08" />
<xacro:property name="earth_space" value="0.015" />
<link name="base_footprint">
<visual>
<geometry>
<sphere radius="${base_footprint_radius}" />
geometry>
visual>
link>
<link name="base_link">
<visual>
<geometry>
<cylinder radius="${base_link_radius}" length="${base_link_length}" />
geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="yellow">
<color rgba="0.5 0.3 0.0 0.5" />
material>
visual>
link>
<joint name="base_link2base_footprint" type="fixed">
<parent link="base_footprint" />
<child link="base_link" />
<origin xyz="0 0 ${earth_space + base_link_length / 2 }" />
joint>
<xacro:property name="wheel_radius" value="0.0325" />
<xacro:property name="wheel_length" value="0.015" />
<xacro:macro name="add_wheels" params="name flag">
<link name="${name}_wheel">
<visual>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}" />
geometry>
<origin xyz="0.0 0.0 0.0" rpy="${PI / 2} 0.0 0.0" />
<material name="black" />
visual>
link>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="0 ${flag * base_link_radius} ${-(earth_space + base_link_length / 2 - wheel_radius) }" />
<axis xyz="0 1 0" />
joint>
xacro:macro>
<xacro:add_wheels name="left" flag="1" />
<xacro:add_wheels name="right" flag="-1" />
<xacro:property name="support_wheel_radius" value="0.0075" />
<xacro:macro name="add_support_wheel" params="name flag" >
<link name="${name}_wheel">
<visual>
<geometry>
<sphere radius="${support_wheel_radius}" />
geometry>
<origin xyz="0 0 0" rpy="0 0 0" />
<material name="black" />
visual>
link>
<joint name="${name}_wheel2base_link" type="continuous">
<parent link="base_link" />
<child link="${name}_wheel" />
<origin xyz="${flag * (base_link_radius - support_wheel_radius)} 0 ${-(base_link_length / 2 + earth_space / 2)}" />
<axis xyz="1 1 1" />
joint>
xacro:macro>
<xacro:add_support_wheel name="front" flag="1" />
<xacro:add_support_wheel name="back" flag="-1" />
robot>
launch文件,注意文件名修改
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find urdf01_rviz)/urdf/xacro/demo05_car_base.urdf.xacro" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
<node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" output="screen" />
launch>
5、Rviz控制机器人运动(arbotix)
实现流程:
- 安装 Arbotix
- 创建新功能包,准备机器人 urdf、xacro 文件
- 添加 Arbotix 配置文件
- 编写 launch 文件配置 Arbotix
- 启动 launch 文件并控制机器人模型运动
安装
sudo apt install ros-noetic-arbotix
添加 arbotix 所需配置文件
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手)....
# 因此,根 name 是 controller
controllers: {
# 单控制器设置
base_controller: {
#类型: 差速控制器
type: diff_controller,
#参考坐标
base_frame_id: base_footprint,
#两个轮子之间的间距
base_width: 0.2,
#控制频率
ticks_meter: 2000,
#PID控制参数,使机器人车轮快速达到预期速度
Kp: 12,
Kd: 12,
Ki: 0,
Ko: 50,
#加速限制
accel_limit: 1.0
}
}
launch 示例代码
<launch>
<param name="robot_description" command="$(find xacro)/xacro $(find urdf01_rviz)/urdf/xacro/car.urdf.xacro" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf01_rviz)/config/show_mycar.rviz" />
<node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" output="screen" />
<node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" />
<node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen">
<rosparam file="$(find urdf01_rviz)/config/control.yml" command="load" />
<param name="sim" value="true" />
node>
launch>
启动launch后,命令行输入rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'机器人即可成功启动
6、URDF集成Gazebo
1、快速体验
1.创建功能包
创建新功能包,导入依赖包: urdf、xacro、gazebo_ros、gazebo_ros_control、gazebo_plugins
2.编写URDF文件
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
<material name="yellow">
<color rgba="0.5 0.3 0.0 1" />
material>
visual>
<collision>
<geometry>
<box size="0.5 0.2 0.1" />
geometry>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
collision>
<inertial>
<origin xyz="0 0 0" />
<mass value="6" />
<inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" />
inertial>
link>
<gazebo reference="base_link">
<material>Gazebo/Blackmaterial>
gazebo>
robot>
注意, 当 URDF 需要与 Gazebo 集成时,和 Rviz 有明显区别:
1.必须使用 collision 标签,因为既然是仿真环境,那么必然涉及到碰撞检测,collision 提供碰撞检测的依据。
2.必须使用 inertial 标签,此标签标注了当前机器人某个刚体部分的惯性矩阵,用于一些力学相关的仿真计算。
3.颜色设置,也需要重新使用 gazebo 标签标注,因为之前的颜色设置为了方便调试包含透明度,仿真环境下没有此选项。
3.启动Gazebo并显示模型
launch 文件实现:
<launch>
<param name="robot_description" textfile="$(find urdf02_gazebo)/urdf/demo01_hello.urdf" />
<include file="$(find gazebo_ros)/launch/empty_world.launch" />
<node pkg="gazebo_ros" type="spawn_model" name="model" args="-urdf -model mycar -param robot_description" />
launch>
2、gazebo相关设置
1.collision
如果机器人link是标准的几何体形状,和link的 visual 属性设置一致即可。
2.inertial
惯性矩阵的设置需要结合link的质量与外形参数动态生成,标准的球体、圆柱与立方体的惯性矩阵公式如下(已经封装为 xacro 实现):
球体惯性矩阵
<xacro:macro name="sphere_inertial_matrix" params="m r">
<inertial>
<mass value="${m}" />
<inertia ixx="${2*m*r*r/5}" ixy="0" ixz="0"
iyy="${2*m*r*r/5}" iyz="0"
izz="${2*m*r*r/5}" />
inertial>
xacro:macro>
圆柱惯性矩阵
<xacro:macro name="cylinder_inertial_matrix" params="m r h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
izz="${m*r*r/2}" />
inertial>
xacro:macro>
立方体惯性矩阵
<xacro:macro name="Box_inertial_matrix" params="m l w h">
<inertial>
<mass value="${m}" />
<inertia ixx="${m*(h*h + l*l)/12}" ixy = "0" ixz = "0"
iyy="${m*(w*w + l*l)/12}" iyz= "0"
izz="${m*(w*w + h*h)/12}" />
inertial>
xacro:macro>
需要注意的是,原则上,除了 base_footprint 外,机器人的每个刚体部分都需要设置惯性矩阵,且惯性矩阵必须经计算得出,如果随意定义刚体部分的惯性矩阵,那么可能会导致机器人在 Gazebo 中出现抖动,移动等现象。
3.颜色设置
在 gazebo 中显示 link 的颜色,必须要使用指定的标签:
<gazebo reference="link节点名称">
<material>Gazebo/Bluematerial>
gazebo>
**PS:**material 标签中,设置的值区分大小写,颜色可以设置为 Red Blue Green Black …
3、仿真环境的搭建与使用
对于使用已搭建完的世界,在空世界中包含world文件即可
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find demo02_urdf_gazebo)/worlds/hello.world" />
include>
对于环境的搭建(要占用大量电脑资源)
- 方式1: 直接添加内置组件创建仿真环境
- 方式2: 手动绘制仿真环境(更为灵活)
7、URDF、Rviz和Gazebo综合使用
关于URDF(Xacro)、Rviz 和 Gazebo 三者的关系。 URDF 用于创建机器人模型、Rviz 可以显示机器人感知到的环境信息,Gazebo 用于仿真,可以模拟外界环境,以及机器人的一些传感器
参考文档: http://gazebosim.org/tutorials?tut=ros_gzplugins
八、机器人导航
http://wiki.ros.org/navigation
1、导航概述
全局地图、自身定位、路径规划、运动控制、环境感知
2、导航实现
1、准备工作
- 安装 gmapping 包(用于构建地图):
sudo apt install ros-noetic-gmapping - 安装地图服务包(用于保存与读取地图):
sudo apt install ros-noetic-map-server - 安装 navigation 包(用于定位以及路径规划):
sudo apt install ros-noetic-navigation
最后创建新功能包,导入依赖gmapping map_server amcl move_base
2、SLAM建图
官方文档
创建launch文件
<launch>
<param name="use_sim_time" value="true"/>
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<remap from="scan" to="scan"/>
<param name="base_frame" value="base_footprint"/>
<param name="odom_frame" value="odom"/>
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
node>
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" />
launch>
首先启动 Gazebo 仿真环境
再启动地图绘制的 launch 文件:
然后启动键盘键盘控制节点,用于控制机器人运动建图
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
最后在 rviz 中添加组件,显示栅格地图
3、地图服务
依次启动仿真环境,键盘控制节点与SLAM节点,绘制地图后启动保存地图的launch文件,即可保存地图信息
<launch>
<arg name="filename" value="$(find nav_demo)/map/nav" />
<node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" />
launch>
对于地图的获取,启动新的launch文件,即可发布map地图信息了,之后只需要在rviz订阅/map即可
<launch>
<arg name="map" default="nav.yaml" />
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav_demo)/map/$(arg map)"/>
launch>
nav.yaml部分详解
#1.声明地图图片资源的路径
image: /home/shawn/catkin_demo/src/nav_demo/map/nav.pgm
#2.地图刻度尺单位是米/像素
resolution: 0.050000
#3.地图的位姿(相对于rViz中的原点的位姿)
origin: [-50.000000,-50.000000,0.0]
#4.占用阈值
occupied thresh: 0.65
#5空闲间值
free thresh: 0.196
#6.取反
negate: 0
4、定位
编写launch文件
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="base_frame_id" value="base_footprint"/>
<param name="global_frame_id" value="map"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
node>
launch>
测试launch文件
<launch>
<arg name="map" default="nav.yaml" />
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav_demo)/map/$(arg map)"/>
<include file="$(find nav_demo)/launch/amcl.launch" />
<node pkg="rviz" type="rviz" name="rviz"/>
launch>
执行
1.先启动 Gazebo 仿真环境
2.启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
3.启动上一步中集成地图服务、amcl 与 rviz 的 launch 文件;
4.在启动的 rviz 中,添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
5、路径规划
创建nav05_path.launch文件
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<rosparam file="$(find nav_demo)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find nav_demo)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find nav_demo)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find nav_demo)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find nav_demo)/param/base_local_planner_params.yaml" command="load" />
node>
launch>
costmap_common_params.yaml
该文件是move_base 在全局路径规划与本地路径规划时调用的通用参数,包括:机器人的尺寸、距离障碍物的安全距离、传感器信息等。配置参考如下:
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint
robot_radius: 0.12 #圆形
# footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状
obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图
raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物
#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物
inflation_radius: 0.2
#代价比例系数,越大则代价值越小
cost_scaling_factor: 3.0
#地图类型
map_type: costmap
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
global_costmap_params.yaml
该文件用于全局代价地图参数设置:
global_costmap:
global_frame: map #地图坐标系
robot_base_frame: base_footprint #机器人坐标系
# 以此实现坐标变换
update_frequency: 1.0 #代价地图更新频率
publish_frequency: 1.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.
local_costmap_params.yaml
该文件用于局部代价地图参数设置:
local_costmap:
global_frame: odom #里程计坐标系
robot_base_frame: base_footprint #机器人坐标系
update_frequency: 10.0 #代价地图更新频率
publish_frequency: 10.0 #代价地图的发布频率
transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间
static_map: false #不需要静态地图,可以提升导航效果
rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化
width: 3 # 局部地图宽度 单位是 m
height: 3 # 局部地图高度 单位是 m
resolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致
base_local_planner_params
基本的局部规划器参数配置,这个配置文件设定了机器人的最大和最小速度限制值,也设定了加速度的阈值。
TrajectoryPlannerROS:
# Robot Configuration Parameters
max_vel_x: 0.5 # X 方向最大速度
min_vel_x: 0.1 # X 方向最小速速
max_vel_theta: 1.0 #
min_vel_theta: -1.0
min_in_place_vel_theta: 1.0
acc_lim_x: 1.0 # X 加速限制
acc_lim_y: 0.0 # Y 加速限制
acc_lim_theta: 0.6 # 角速度加速限制
# Goal Tolerance Parameters,目标公差
xy_goal_tolerance: 0.10
yaw_goal_tolerance: 0.05
# Differential-drive robot configuration
# 是否是全向移动机器人
holonomic_robot: false
# Forward Simulation Parameters,前进模拟参数
sim_time: 0.8
vx_samples: 18
vtheta_samples: 20
sim_granularity: 0.05
最后文件集成
运行仿真环境、运行launch文件
<launch>
<arg name="map" default="nav.yaml" />
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav_demo)/map/$(arg map)"/>
<include file="$(find nav_demo)/launch/nav04_amcl.launch" />
<include file="$(find nav_demo)/launch/nav05_path.launch" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find nav_demo)/config/nav.rviz" />
launch>
6、导航与SLAM建图
1.编写launch文件
当前launch文件实现,无需调用map_server的相关节点,只需要启动SLAM节点与move_base节点,示例内容如下:
<launch>
<include file="$(find nav_demo)/launch/nav01_slam.launch" />
<include file="$(find nav_demo)/launch/nav05_path.launch" />
launch>
2.测试
1.首先运行gazebo仿真环境;
2.然后执行launch文件;
3.在rviz中通过2D Nav Goal设置目标点,机器人开始自主移动并建图了;
4.最后可以使用 map_server 保存地图。
九、学习资料
ROS: https://www.ros.org
ROS Wiki: http://wiki.ros.org
ROSCon 2012~2019:https://roscon.ros.org
ROS Robots: https://robots.ros.org
Ubuntu Wiki: https://wiki.ubuntu.org.cn
古月居:http://www.guyuehome.com
古月居泡泡:https://www.guyuehome.com/Bubble
古月学院:https://class.guyuehome.com
如何学习ROS:
https://mp.weixin.qq.com/s/uYvGuiG-TlOalWUynR2Nzg
一起从零手写URDF模型:
https://class.guyuehome.com/detail/p5eleea4fe1e5c_lgm126Xn/6
如何从Solidworks导出URDF模型
https://class.guyuehome.com/detail/p5e32dce7906e0_6TqS7BwX/6
如何在Gazebo中实现移动机器人仿真:
https://class.guyuehome.com/detail/p_5eb2366befe4aE4rbNmXt/6
Movelt可视化配置及仿真指南
https://class.guyuehome.com/detail/p_5e71966b3fdfd_g4DpRGg9/6