Python 使用cv2.canny 进行图像边缘检测
CV2提供了提取图像边缘的函数canny。其算法思想如下:
1. 使用高斯模糊,去除噪音点(cv2.GaussianBlur)
2. 灰度转换(cv2.cvtColor)
3. 使用sobel算子,计算出每个点的梯度大小和梯度方向
4. 使用非极大值抑制(只有最大的保留),消除边缘检测带来的杂散效应
5. 应用双阈值,来确定真实和潜在的边缘
6. 通过抑制弱边缘来完成最终的边缘检测
Canny函数的定义如下:
edge = cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
参数含义如下:
- image:要检测的图像
- threshold1:阈值1(最小值)
- threshold2:阈值2(最大值),使用此参数进行明显的边缘检测
- edges:图像边缘信息
- apertureSize:sobel算子(卷积核)大小
- L2gradient :布尔值。
True: 使用更精确的L2范数进行计算(即两个方向的导数的平方和再开方)
False:使用L1范数(直接将两个方向导数的绝对值相加)


其中较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来。
- 阈值对检测结果的影响
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('d:\\girl.png')
edges = cv2.Canny(img,100,200)
edges2 = cv2.Canny(img,50,200)
plt.subplot(131),plt.imshow(img,cmap = 'gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(132),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image1'), plt.xticks([]), plt.yticks([])
plt.subplot(133),plt.imshow(edges2,cmap = 'gray')
plt.title('Edge Image2'), plt.xticks([]), plt.yticks([])
plt.show()
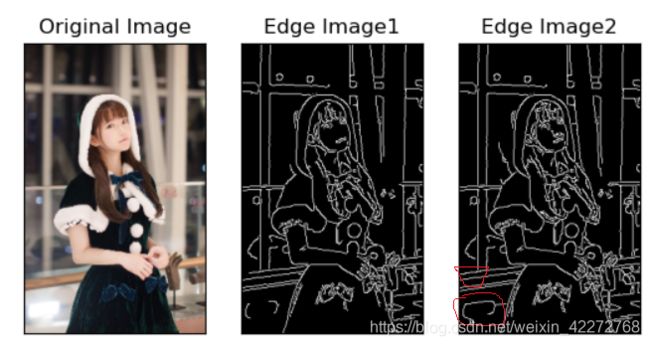
可以看到,在调整threshold1之后,检测出的边缘增多了。
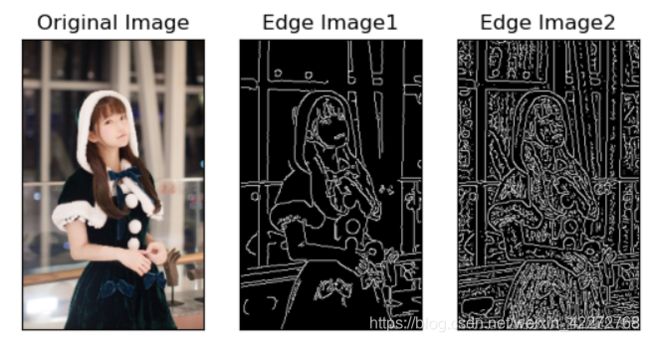
- sobel算子对检测结果的影响
sobel默认的算子大小是3,扩大算子,会获得更多的细节,但是也更能提取图像了。
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('d:\\girl.png')
edges = cv2.Canny(img,100,200,apertureSize=3)
edges2 = cv2.Canny(img,100,200,apertureSize=5)
plt.subplot(131),plt.imshow(img,cmap = 'gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(132),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image1'), plt.xticks([]), plt.yticks([])
plt.subplot(133),plt.imshow(edges2,cmap = 'gray')
plt.title('Edge Image2'), plt.xticks([]), plt.yticks([])
plt.show()
- 范数对检测结果的影响
L2gradient=True时,检测出的边缘减少了。
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('d:\\girl.png')
edges = cv2.Canny(img,100,200,L2gradient=False)
edges2 = cv2.Canny(img,100,200,L2gradient=True)
plt.subplot(131),plt.imshow(img,cmap = 'gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(132),plt.imshow(edges,cmap = 'gray')
plt.title('Edge Image1'), plt.xticks([]), plt.yticks([])
plt.subplot(133),plt.imshow(edges2,cmap = 'gray')
plt.title('Edge Image2'), plt.xticks([]), plt.yticks([])
plt.show()
