表格识别之图像基础+轮廓提取+透视校正
一、图片读取cv2.imread(路径,格式3选1)
格式=1:彩色;0:灰度;-1同1,数据结构如下:
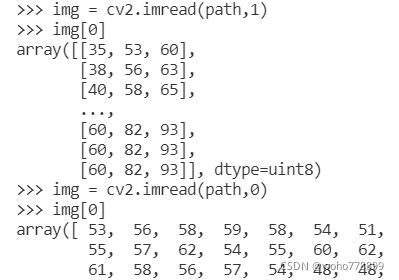
前面是彩色图,三维;后面是灰度图,二维。
二、图像二值化cv2.threshold,cv2.adaptiveThreshold
1. cv2.threshold(对象,阈值,设定值,阈值规则5选1),可处理彩色图。比如:
ret,th1 = cv2.threshold(img,127,255,cv2.THRESH_BINARY)。
ret:True或False,代表有没有读到图片;dst: 目标图像;
表示大于127值的全置为255,否则置为0。
2. cv2.adaptiveThreshold(加工对象,设定值,计算方法2选1,阈值规则5选1,阈值区域大小,常量),只能处理灰色图。比如:
th3 = cv2.adaptiveThreshold(~img,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY,35,-5),35*35区域?加权平均加上5设为阈值(常量可以为负),大于阈值置为255,否则置0。文字表格效果不错,见下图:

不加“~”,即在源对象前不加“~”,cv2.adaptiveThreshold(img,255,...,效果如下:

三、图像平滑处理(滤波降噪)cv2.blur、cv2.boxFilter、cv2.medianBlur、cv2.GaussianBlur、cv2.bilateralFilter
1. 均值滤波:cv2.blur(对象,核大小),如:blur = cv2.blur(img,(3,3)),该点对应核中中心,设定值为核大小范围内的所有值平均,边缘处理不详,如下:

2.方框滤波:类似均值滤波,最后一个参数Ture时取均值,为False时,取和。

3.中值滤波:cv2.medianBlur(对象,n),n为大于1的奇数。取中位数,边缘处理不详,如下:

4.高斯滤波(貌似用的很多):cv2.GaussianBlur(对象,核,0,0),核中心权重最大,周围依次下降,后面两个参数,可只设置一个,应该是X、Y轴的计算微调,网上说是标准差之类。

3X1的核,权重为25%、50%、25%。3X3核依次为:0.0625、0.125、0.0625、0.125、0.25、0.125、0.0625、0.125、0.0625。如果将差参数置1,会产生小量变化。
5.双边滤波:cv2.bilateralFilter(对象,n,0,0),n代表核大小,又有说直径范围,后两个参数分别代表颜色、位置的微调值(标准差)。计算方法不详,同时考虑距离和差值,过于复杂,反应慢。能很好的保留边缘信息。用法举例:cv2.bilateralFilter(gray,9,75,75)。
6.网上小结:
- 在不知道用什么滤波器好的时候,优先高斯滤波
cv2.GaussianBlur(),然后均值滤波cv2.blur()。 - 斑点和椒盐噪声优先使用中值滤波
cv2.medianBlur()。 - 要去除噪点的同时尽可能保留更多的边缘信息,使用双边滤波
cv2.bilateralFilter()。 - 线性滤波方式:均值滤波、方框滤波、高斯滤波(速度相对快)。
- 非线性滤波方式:中值滤波、双边滤波(速度相对慢)。
四、图像边缘检测cv2.canny、cv2.sobel、cv2.Laplacian
1、cv2.Canny(对象,最小值,最大值),可选参数apertureSize=7,最大为7效果不错,线框闭合,对比如下:
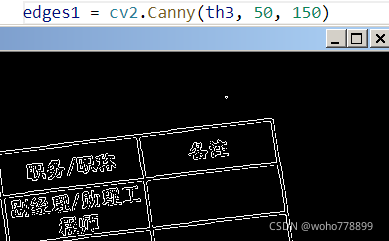
apertureSize: aperture size for the Sobel operator.算子的孔径大小。

2、cv2.Sobel(对象,深度,X,Y)


3、拉普拉斯cv2.laplacian(对象,深度),可选核大小。

五、内核设置:ker=cv2.getStructuringElement( 形状3选1,大小,中心) ,返回指定的结构元素,即规则。
形状为下面三种,中心设置好象只对交叉形有效。
矩形:MORPH_RECT;
交叉形:MORPH_CROSS;用第三个参加调整中心点(见下图)
椭圆形:MORPH_ELLIPSE;

六、 腐蚀:cv2.erode(对象,规则)方法用于对图像进行腐蚀。
通常在二进制图像上执行。dst = cv.erode(src, kernel[, dst[, anchor[, iterations[, borderType[, borderValue]]]]])。比如:cv2.erode(bin_src,kernel,iterations = 1)
它至少需要两个输入,一个是我们的原始图像,第二个是决定操作性质的结构元素或内核。仅当满足内核条件要求下所有像素均为1时,原始图像中的像素被视为1,否则设为零,相当于“求和”操作。效果是黑色背景变大。
设置线性核,可取出表格线:kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(33,1))
效果如下:

图中上半截为二进制表格图像,下半截为经过33*1线性核腐蚀后的效果,取出了表格横线。
七、膨胀 :cv2.dilate(对象,规则):与腐蚀相反的效果。
dst = cv2.dilate(src, kernel[, dst[, anchor[, iterations[, borderType[, borderValue]]]]])
原理解析:比如:设置7*1线性核>>> kernel = cv2.getStructuringElement(cv2.MORPH_RECT,(7,1))>>> dilatedcol = cv2.dilate(binary,kernel,iterations = 1),前后对比如下:

以长度7为核进行膨胀,即以本身点为中点,前后各3个点,如有1个为1即计为1,全0才记为0,相当于“求或”操作。
将前景物体变大,理解成白色部分变粗加长(在图片上画上黑色背景变小,迭代次数增加,白色断线逐渐相连。)
八、直线检测 cv2.HoughLinesP(对象,1,np.pi/180,n),可选minLineLength=30,maxLineGap=5。
cv2.HoughLinesP(edges,1,np.pi/360,10,minLineLength=30,maxLineGap=5)

可选项maxLineGap=5,表示线段断点距离,不能直接用数字,前面的英文不能省。该值越大,线段越长越多,见下图:

必选项第4项threshold参数,数值,表示检测一条直线所需最少的曲线交点,值越小线段越多。
返回结果为两个坐标点的数组,如下:

九、轮廓检测cv2.findContours()、回画cv2.drawContours()、最小外接矩形cv2.minAreaRect()、外接多边形cv2.approxPolyDP
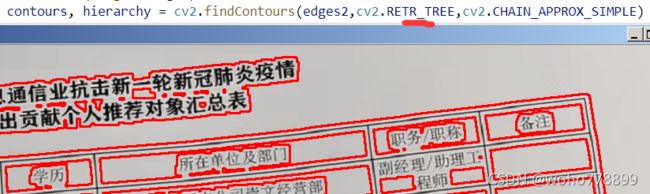
1、cv2.findContours(二值对象,模式4选1,方法多选1),比如:
contours, hierarchy = cv2.findContours(binary,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
第二个参数,其中EXTERNAL表示只检测外轮廓,但一定是封闭的,TREE表示树型,大轮廓中的小轮廓也检测出来,对比如下:

返回的第一个值,为列表类型,长短不一,如下:
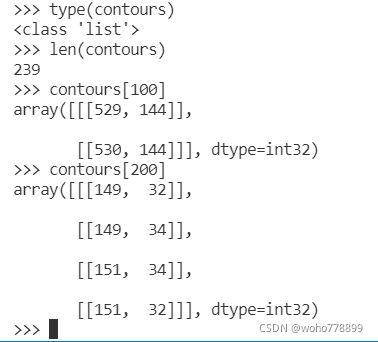
返回的第二个值,表示各个轮廓序列和层级等关系,没感觉到实用性,数据形式如下:

2、在图像上绘制轮廓cv2.drawContours(图像,轮廓,第几条,颜色,线宽等),比如:

提取最长轮廓,单独显示:

提取面积最大的轮廓cv2.contourArea(contour),对于复杂的表格场景,这个似乎比提取最长轮廓更准备识别出表格:
longest=largest=np.array([[[ 1, 1]],[[ 1, 2]]], dtype=np.int32)
for ct in contours:
if len(ct)>=len(longest):
longest=ct
if cv2.contourArea(ct)>cv2.contourArea(largest):
largest=ct
cv2.drawContours(img,longest,-1,(0,0,255),5)
cv2.drawContours(img,largest,-1,(0,255,0),2)
print('共找到',len(contours),'个轮廓,最长轮廓长为',len(longest),'轮廓面积为:',cv2.contourArea(longest))
print('面积最大轮廓长为',len(largest),'轮廓面积为:',cv2.contourArea(largest))效果如下,其中绿色框为最大面积轮廓提取法,红色为最长轮廓数提取法:


3、最小矩形 cv2.minAreaRect(轮廓),如下:

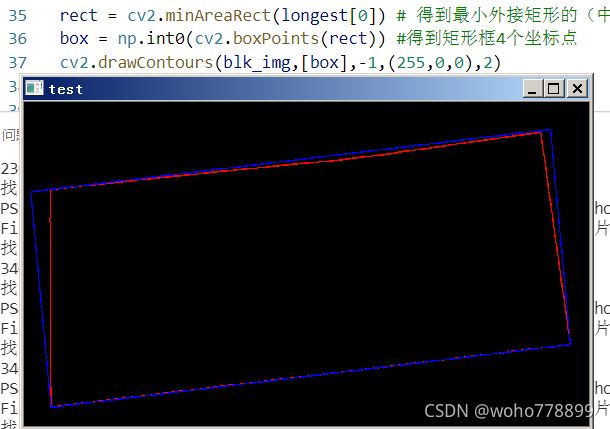
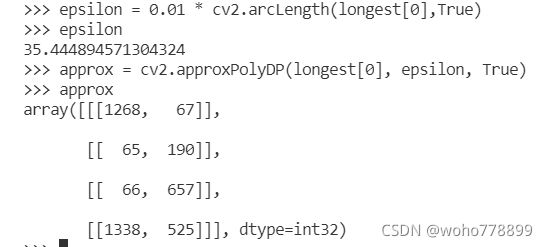
4、外接多边形cv2.approxPolyDP(轮廓,距离,是否闭合),距离double epsilon:判断点到相对应的line segment 的距离的阈值。(距离大于此阈值则舍弃,小于此阈值则保留,epsilon越小,折线的形状越“接近”曲线。)是否闭合bool closed:曲线是否闭合的标志位。返回坐标点。
arcLength函数,主要是计算图像轮廓的周长,第二个参数表示是否闭合,返回double数。如下:
效果如下: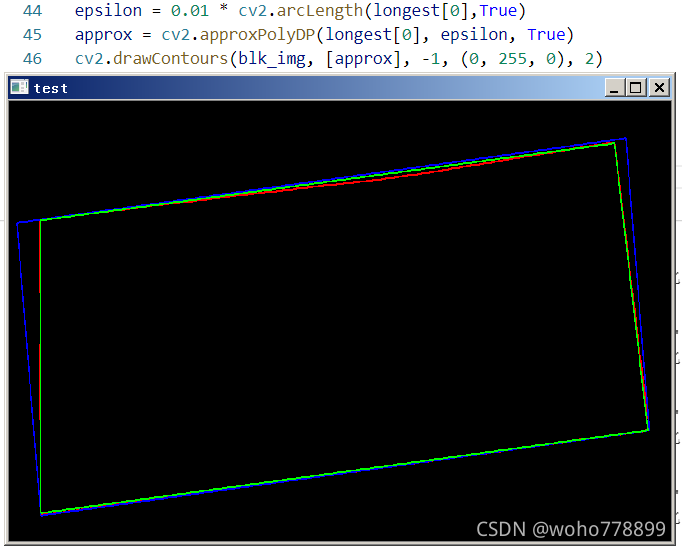
可以看出,多边形对比于外接最小矩形,更接近真实情况,返回坐标值,可直接校正操作。

如果所得多边形,多于4个点,可借助矩形点求最近值来确定4个点。不能通过调整epsilon参数循环获得准确坐标,如下: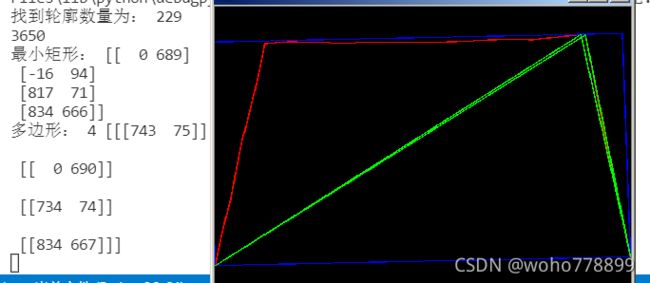
十、图像透视校正:cv2.getPerspectiveTransform
1、多边形顶点数组降维确定,approx.sum(axis=维度),维度取值为:0、1、2等。
顶点数据结构如下:

可看出这是一个4*1*2结构的数据,直接用approx.sum(axis=1)消除第二维,就可以得到一个4*2的四个顶点坐标数据,当然也可写个循环取出来,结果如下:

关于这个axis参数,=0消除第一维,其他维数求和,=1消除第二维,其他求和,依次类推。如下:

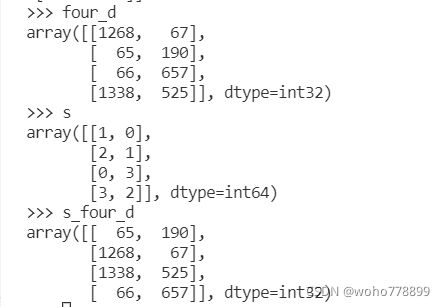
2.四边形4点顺序确定。通过np.argsort(four_d,axis=0)分组实现
关于确定左上角点P1,网上用np.argmin(approx),这个不能达到目的,不能以简单的最小值、最大值来确定左上、右下的角点坐标,如下:
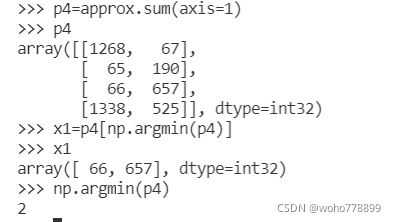
这个argmin函数返回的是:所有数据混合后最小值的索引,如果加上参数axis=0或1(理解为行或列),则返回每列或每行(顺序颠倒)的最小值数组。如4*2,=0时,返回二个值数组,见下图:

显然,理论依据不成立。
可采取二分法来找出顶点坐标。
#四点排序:左上、右上、右下、左下#画水平横线,将四点分上下两部分,即根据Y值分成1、2一组,3、4一组,再分组比较X值
four_d=approx.sum(axis=1)#降维,生成四点的坐标
s_four_d=four_d.copy()
s=np.argsort(four_d,axis=0)#按列排序,返回每列索引值
if four_d[s[0][1]][0]运行结果如下:
3.原始尺寸的还原。如图:
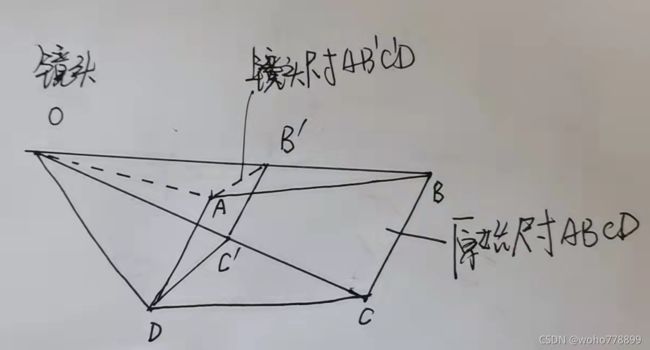
网上的各取XY两个方向的最大值,显然有误差,因为C'D 4、建立透视规则:tf=cv2.getPerspectiveTransform(源4点,新4点),点的类型为浮点型,如不是,可通过s_four_d=s_four_d.astype(np.float32)转成浮点32型。返回规则,生成新图像时需要用上,实为3*3矩阵,如下: >>> m=cv2.getPerspectiveTransform(s_four_d,transform_axis) 5、生成透视后的图像:cv2.warpPerspective(原图像,规则,新图像大小),返回新图像,比如: img_out = cv2.warpPerspective(img, m, (img_width, img_height)),效果如下: 6、透视图像的边缘处理。表格线太靠近边缘,可各增加5个点。表头没有透视进来,可设置一个Y方向的增量,将表头也透视进来,部分代码如下: 效果如下: 透视不足的地方,用黑边进行了代替,还行。 用法:dist = cv2.distanceTransform(gray, cv2.DIST_L1, cv2.DIST_MASK_PRECISE),操作对象为二值图片,灰色图也可以。距离类型有多种,其中cv2.DIST_L1为基本型,|X1-X2|+|Y1-Y2|,数步值,即X、Y两个方向步数之和;cv2.DIST_L2为欧氏距离,两点的直线距离,平方和再开方。得到距离图为浮点32型,如下: 显示效果时需要将值作个除法:cv2.imshow("distance", dist/155),如右图: 具体运用时,可遍历所有点,只保留最大值dist.max(),或接近最大值的范围值,如>dist.max()*0.8,这样可以更好的保留骨干信息。#还原图像尺寸
(tl, tr, br, bl) = s_four_d
# 计算轮廓的宽和长,分别大小
widthA = np.sqrt(((tl[0]-tr[0])**2) + ((tl[1]-tr[1])**2))
widthB = np.sqrt(((bl[0]-br[0])**2) + ((bl[1] - br[1])**2))
widthMax = max(int(widthB), int(widthA))
widthMin = min(int(widthB), int(widthA))
heightA = np.sqrt(((tl[0]-bl[0])**2) + ((tl[1]-bl[1])**2))
heightB = np.sqrt(((tr[0]-br[0])**2) + ((tr[1] - br[1])**2))
heightMax = max(int(heightA), int(heightB))
heightMin = min(int(heightA), int(heightB))
#判断XY两个方向失真比率
if widthMax/widthMin>heightMax/heightMin:#如果y方向失真严重些,即两横线比率大于两竖线比率。
img_width=widthMax#以X长边(横线)为基准
img_height=int(((widthMax/widthMin-heightMax/heightMin)/2+1)*heightMax) #校正Y方向增量,两比率差值除以2
else:#否则,如果X方向失真大些
img_height=heightMax#以Y(竖线)长边为基准
img_width=int(((heightMax/heightMin-widthMax/widthMin)/2+1)*widthMax)#校正X方向增量
# 四个角的位置信息
transform_axis = np.array([
[0, 0],
[img_width-1, 0],
[img_width-1, img_height-1],
[0, img_height-1],
], dtype='float32')
>>> m
array([[ 1.08313688e+00, -2.31935092e-03, -6.99632205e+01],
[ 1.13144710e-01, 1.10661046e+00, -2.17610393e+02],
[ 9.56494920e-06, 1.26357675e-04, 1.00000000e+00]])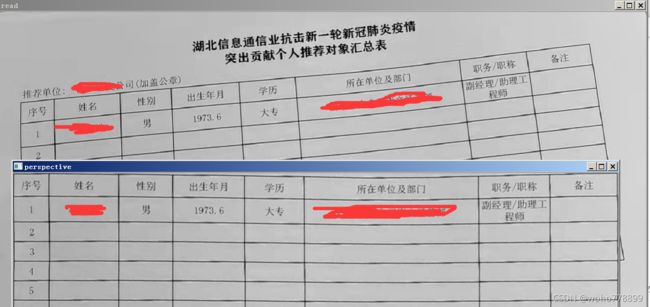
d_y=100#四点外的图像同步透视,设置Y方向的增量,比如表头
transform_axis = np.array([
[5, 5+d_y],
[img_width+4, 5+d_y],
[img_width+4, img_height+4+d_y],
[5, img_height+4+d_y],
], dtype='float32')
#图像透视校正:cv2.getPerspectiveTransform(源4点,新4点),浮点型,返回规则矩阵
m=cv2.getPerspectiveTransform(s_four_d,transform_axis)
#使用cv2.warpPerspective()和矩阵规则,获得变化后的图像
img_out = cv2.warpPerspective(img, m, (img_width+10, img_height+10+d_y))
十一、零点距离图:cv2.distanceTransform(对象,距离类型,掩模)

