TensorRT和PyTorch模型的故事
点击上方“视学算法”,选择加"星标"或“置顶”
重磅干货,第一时间送达
作者丨伯恩legacy
来源丨https://zhuanlan.zhihu.com/p/88318324
编辑丨极市平台
一.简介
TensorRT是Nvidia公司出的能加速模型推理的框架,其实就是让你训练的模型在测试阶段的速度加快,比如你的模型测试一张图片的速度是50ms,那么用tensorRT加速的话,可能只需要10ms。当然具体能加速多少也不能保证,反正确实速度能提升不少。但是TensorRT坑爹的地方在于,有些模型操作是不支持的、又或者就算支持但是支持并不完善,对于这些难题,要么自己写插件,要么就只能等待官方的更新了。
现在我们训练深度学习模型主流的框架有tensorflow,pytorch,mxnet,caffe等。这个贴子只涉及pytorch,对于tensorflow的话,可以参考TensorRT部署深度学习模型,https://zhuanlan.zhihu.com/p/84125533,这个帖子是c++如何部署TensorRT。其实原理都是一样的,对于tensorflow模型,需要把pb模型转化为uff模型;对于pytorch模型,需要把pth模型转化为onnx模型;对于caffe模型,则不需要转化,因为tensorRT是可以直接读取caffe模型的。mxnet模型也是需要转化为onnx的。
那么,这篇教学贴主要是从python和c++两种语言环境下,尝试将pytorch模型转化为tensorRT,教刚接触TensorRT的同学们如何快速上手。
二.TensorRT的安装
TensorRT的安装并不难,推荐安装最新版本的。由于我使用的是Centos,因此我一般是按照这个教程来安装TensorRT的。
CentOS安装TensorRT指南
https://tbr8.org/how-to-install-tensorrt-on-centos/
安装完成后,在python环境下import tensorrt看能不能成功,并且编译一下官方的sampleMnist的例子,如果都可以的话,就安装成功了。

python环境下,成功导入tensorrt

运行官方的mnist例子
三.Python环境下pytorch模型如何转化为TensorRT
python环境下pytorch模型转化为TensorRT有两种路径,一种是先把pytorch的pt模型转化为onnx,然后再转化为TensorRT;另一种是直接把pytorch的pt模型转成TensorRT。
首先,我们先把pt模型转化为onnx模型,需要安装onnx,直接pip install onnx即可。我们以ResNet50为例,代码如下:
import torchvisionimport torchfrom torch.autograd import Variableimport onnxprint(torch.__version__)
input_name = ['input']output_name = ['output']input = Variable(torch.randn(1, 3, 224, 224)).cuda()model = torchvision.models.resnet50(pretrained=True).cuda()torch.onnx.export(model, input, 'resnet50.onnx', input_names=input_name, output_names=output_name, verbose=True)
以上代码使用torchvision里面预训练的resnet50模型为基础,将resnet50的pt模型转化成res50.onnx,其中规定onnx的输入名是'input',输出名是'output',输入图像的大小是3通道224x224。其中batch size是1,其实这个batch size你可以取3、4、5等。运行这个代码就可以生成一个名为resnet50.onnx文件。
最好检查一下生成的onnx,代码如下:
test = onnx.load('resnet50.onnx')
onnx.checker.check_model(test)
print("==> Passed")
接下来比较一下pytorch模型和TensorRT的结果吧:
import pycuda.autoinitimport numpy as npimport pycuda.driver as cudaimport tensorrt as trtimport torchimport osimport timefrom PIL import Imageimport cv2import torchvision
filename = 'test.jpg'max_batch_size = 1onnx_model_path = 'resnet50.onnx'
TRT_LOGGER = trt.Logger() # This logger is required to build an engine
def get_img_np_nchw(filename): image = cv2.imread(filename) image_cv = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) image_cv = cv2.resize(image_cv, (224, 224)) miu = np.array([0.485, 0.456, 0.406]) std = np.array([0.229, 0.224, 0.225]) img_np = np.array(image_cv, dtype=float) / 255. r = (img_np[:, :, 0] - miu[0]) / std[0] g = (img_np[:, :, 1] - miu[1]) / std[1] b = (img_np[:, :, 2] - miu[2]) / std[2] img_np_t = np.array([r, g, b]) img_np_nchw = np.expand_dims(img_np_t, axis=0) return img_np_nchw
class HostDeviceMem(object): def __init__(self, host_mem, device_mem): """Within this context, host_mom means the cpu memory and device means the GPU memory """ self.host = host_mem self.device = device_mem
def __str__(self): return "Host:\n" + str(self.host) + "\nDevice:\n" + str(self.device)
def __repr__(self): return self.__str__()
def allocate_buffers(engine): inputs = [] outputs = [] bindings = [] stream = cuda.Stream() for binding in engine: size = trt.volume(engine.get_binding_shape(binding)) * engine.max_batch_size dtype = trt.nptype(engine.get_binding_dtype(binding)) # Allocate host and device buffers host_mem = cuda.pagelocked_empty(size, dtype) device_mem = cuda.mem_alloc(host_mem.nbytes) # Append the device buffer to device bindings. bindings.append(int(device_mem)) # Append to the appropriate list. if engine.binding_is_input(binding): inputs.append(HostDeviceMem(host_mem, device_mem)) else: outputs.append(HostDeviceMem(host_mem, device_mem)) return inputs, outputs, bindings, stream
def get_engine(max_batch_size=1, onnx_file_path="", engine_file_path="", \ fp16_mode=False, int8_mode=False, save_engine=False, ): """Attempts to load a serialized engine if available, otherwise builds a new TensorRT engine and saves it."""
def build_engine(max_batch_size, save_engine): """Takes an ONNX file and creates a TensorRT engine to run inference with""" with trt.Builder(TRT_LOGGER) as builder, \ builder.create_network() as network, \ trt.OnnxParser(network, TRT_LOGGER) as parser:
builder.max_workspace_size = 1 << 30 # Your workspace size builder.max_batch_size = max_batch_size # pdb.set_trace() builder.fp16_mode = fp16_mode # Default: False builder.int8_mode = int8_mode # Default: False if int8_mode: # To be updated raise NotImplementedError
# Parse model file if not os.path.exists(onnx_file_path): quit('ONNX file {} not found'.format(onnx_file_path))
print('Loading ONNX file from path {}...'.format(onnx_file_path)) with open(onnx_file_path, 'rb') as model: print('Beginning ONNX file parsing') parser.parse(model.read())
print('Completed parsing of ONNX file') print('Building an engine from file {}; this may take a while...'.format(onnx_file_path))
engine = builder.build_cuda_engine(network) print("Completed creating Engine")
if save_engine: with open(engine_file_path, "wb") as f: f.write(engine.serialize()) return engine
if os.path.exists(engine_file_path): # If a serialized engine exists, load it instead of building a new one. print("Reading engine from file {}".format(engine_file_path)) with open(engine_file_path, "rb") as f, trt.Runtime(TRT_LOGGER) as runtime: return runtime.deserialize_cuda_engine(f.read()) else: return build_engine(max_batch_size, save_engine)
def do_inference(context, bindings, inputs, outputs, stream, batch_size=1): # Transfer data from CPU to the GPU. [cuda.memcpy_htod_async(inp.device, inp.host, stream) for inp in inputs] # Run inference. context.execute_async(batch_size=batch_size, bindings=bindings, stream_handle=stream.handle) # Transfer predictions back from the GPU. [cuda.memcpy_dtoh_async(out.host, out.device, stream) for out in outputs] # Synchronize the stream stream.synchronize() # Return only the host outputs. return [out.host for out in outputs]
def postprocess_the_outputs(h_outputs, shape_of_output): h_outputs = h_outputs.reshape(*shape_of_output) return h_outputs
img_np_nchw = get_img_np_nchw(filename)img_np_nchw = img_np_nchw.astype(dtype=np.float32)
# These two modes are dependent on hardwaresfp16_mode = Falseint8_mode = Falsetrt_engine_path = './model_fp16_{}_int8_{}.trt'.format(fp16_mode, int8_mode)# Build an engineengine = get_engine(max_batch_size, onnx_model_path, trt_engine_path, fp16_mode, int8_mode)# Create the context for this enginecontext = engine.create_execution_context()# Allocate buffers for input and outputinputs, outputs, bindings, stream = allocate_buffers(engine) # input, output: host # bindings
# Do inferenceshape_of_output = (max_batch_size, 1000)# Load data to the bufferinputs[0].host = img_np_nchw.reshape(-1)
# inputs[1].host = ... for multiple inputt1 = time.time()trt_outputs = do_inference(context, bindings=bindings, inputs=inputs, outputs=outputs, stream=stream) # numpy datat2 = time.time()feat = postprocess_the_outputs(trt_outputs[0], shape_of_output)
print('TensorRT ok')
model = torchvision.models.resnet50(pretrained=True).cuda()resnet_model = model.eval()
input_for_torch = torch.from_numpy(img_np_nchw).cuda()t3 = time.time()feat_2= resnet_model(input_for_torch)t4 = time.time()feat_2 = feat_2.cpu().data.numpy()print('Pytorch ok!')
mse = np.mean((feat - feat_2)**2)print("Inference time with the TensorRT engine: {}".format(t2-t1))print("Inference time with the PyTorch model: {}".format(t4-t3))print('MSE Error = {}'.format(mse))
print('All completed!')
运行结果如下:
TensorRT okPytorch ok!Inference time with the TensorRT engine: 0.0037250518798828125Inference time with the PyTorch model: 0.3574800491333008MSE Error = 3.297184357139993e-12
这个结果Pytorch模型ResNet50竟然需要340ms,感觉有些迷,但是好像没发现有啥问题。可以发现,TensorRT进行inference的结果和pytorch前向的结果差距很小。代码来源于https://github.com/RizhaoCai/PyTorch_ONNX_TensorRT
接下来介绍python环境下,直接把pytorch模型转化为TensorRT,参考的代码来源于NVIDIA-AI-IOT/torch2trt,https://github.com/NVIDIA-AI-IOT/torch2trt这个工程比较简单易懂,质量很高,安装也不难,我自己运行的结果如下:

对于你自己的Pytorch模型,只需要把该代码的model进行替换即可。注意在运行过程中经常会出现"output tensor has no attribute _trt",这是因为你模型当中有一些操作还没有实现,需要自己实现。
四.C++环境下Pytorch模型如何转化为TensorRT
c++环境下,以TensorRT5.1.5.0的sampleOnnxMNIST为例子,用opencv读取一张图片,然后让TensorRT进行doInference输出(1,1000)的特征。代码如下所示,把这个代码替换sampleOnnxMNIST替换,然后编译就能运行了。
#include #include #include #include #include #include #include #include #include #include #include #include "NvInfer.h"#include "NvOnnxParser.h"#include "argsParser.h"#include "logger.h"#include "common.h"#include "image.hpp"#define DebugP(x) std::cout << "Line" << __LINE__ << " " << #x << "=" << x << std::endl
using namespace nvinfer1;
static const int INPUT_H = 224;static const int INPUT_W = 224;static const int INPUT_C = 3;static const int OUTPUT_SIZE = 1000;
const char* INPUT_BLOB_NAME = "input";const char* OUTPUT_BLOB_NAME = "output";
const std::string gSampleName = "TensorRT.sample_onnx_image";
samplesCommon::Args gArgs;
bool onnxToTRTModel(const std::string& modelFile, // name of the onnx model unsigned int maxBatchSize, // batch size - NB must be at least as large as the batch we want to run with IHostMemory*& trtModelStream) // output buffer for the TensorRT model{ // create the builder IBuilder* builder = createInferBuilder(gLogger.getTRTLogger()); assert(builder != nullptr); nvinfer1::INetworkDefinition* network = builder->createNetwork();
auto parser = nvonnxparser::createParser(*network, gLogger.getTRTLogger());
//Optional - uncomment below lines to view network layer information //config->setPrintLayerInfo(true); //parser->reportParsingInfo();
if ( !parser->parseFromFile( locateFile(modelFile, gArgs.dataDirs).c_str(), static_cast(gLogger.getReportableSeverity()) ) ) { gLogError << "Failure while parsing ONNX file" << std::endl; return false; } // Build the engine builder->setMaxBatchSize(maxBatchSize); //builder->setMaxWorkspaceSize(1 << 20); builder->setMaxWorkspaceSize(10 << 20); builder->setFp16Mode(gArgs.runInFp16); builder->setInt8Mode(gArgs.runInInt8);
if (gArgs.runInInt8) { samplesCommon::setAllTensorScales(network, 127.0f, 127.0f); } samplesCommon::enableDLA(builder, gArgs.useDLACore); ICudaEngine* engine = builder->buildCudaEngine(*network); assert(engine);
// we can destroy the parser parser->destroy();
// serialize the engine, then close everything down trtModelStream = engine->serialize(); engine->destroy(); network->destroy(); builder->destroy();
return true;}
void doInference(IExecutionContext& context, float* input, float* output, int batchSize){ const ICudaEngine& engine = context.getEngine(); // input and output buffer pointers that we pass to the engine - the engine requires exactly IEngine::getNbBindings(), // of these, but in this case we know that there is exactly one input and one output. assert(engine.getNbBindings() == 2); void* buffers[2];
// In order to bind the buffers, we need to know the names of the input and output tensors. // note that indices are guaranteed to be less than IEngine::getNbBindings() const int inputIndex = engine.getBindingIndex(INPUT_BLOB_NAME); const int outputIndex = engine.getBindingIndex(OUTPUT_BLOB_NAME); DebugP(inputIndex); DebugP(outputIndex); // create GPU buffers and a stream CHECK(cudaMalloc(&buffers[inputIndex], batchSize * INPUT_C * INPUT_H * INPUT_W * sizeof(float))); CHECK(cudaMalloc(&buffers[outputIndex], batchSize * OUTPUT_SIZE * sizeof(float)));
cudaStream_t stream; CHECK(cudaStreamCreate(&stream));
// DMA the input to the GPU, execute the batch asynchronously, and DMA it back: CHECK(cudaMemcpyAsync(buffers[inputIndex], input, batchSize * INPUT_C * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream)); context.enqueue(batchSize, buffers, stream, nullptr); CHECK(cudaMemcpyAsync(output, buffers[outputIndex], batchSize * OUTPUT_SIZE * sizeof(float), cudaMemcpyDeviceToHost, stream)); cudaStreamSynchronize(stream);
// release the stream and the buffers cudaStreamDestroy(stream); CHECK(cudaFree(buffers[inputIndex])); CHECK(cudaFree(buffers[outputIndex]));}
//!//! \brief This function prints the help information for running this sample//!void printHelpInfo(){ std::cout << "Usage: ./sample_onnx_mnist [-h or --help] [-d or --datadir=] [--useDLACore=]\n"; std::cout << "--help Display help information\n"; std::cout << "--datadir Specify path to a data directory, overriding the default. This option can be used multiple times to add multiple directories. If no data directories are given, the default is to use (data/samples/mnist/, data/mnist/)" << std::endl; std::cout << "--useDLACore=N Specify a DLA engine for layers that support DLA. Value can range from 0 to n-1, where n is the number of DLA engines on the platform." << std::endl; std::cout << "--int8 Run in Int8 mode.\n"; std::cout << "--fp16 Run in FP16 mode." << std::endl;}
int main(int argc, char** argv){ bool argsOK = samplesCommon::parseArgs(gArgs, argc, argv); if (gArgs.help) { printHelpInfo(); return EXIT_SUCCESS; } if (!argsOK) { gLogError << "Invalid arguments" << std::endl; printHelpInfo(); return EXIT_FAILURE; } if (gArgs.dataDirs.empty()) { gArgs.dataDirs = std::vector{"data/samples/mnist/", "data/mnist/"}; }
auto sampleTest = gLogger.defineTest(gSampleName, argc, const_cast(argv));
gLogger.reportTestStart(sampleTest);
// create a TensorRT model from the onnx model and serialize it to a stream IHostMemory* trtModelStream{nullptr};
if (!onnxToTRTModel("resnet50.onnx", 1, trtModelStream)) gLogger.reportFail(sampleTest);
assert(trtModelStream != nullptr); std::cout << "Successfully parsed ONNX file!!!!" << std::endl; std::cout << "Start reading the input image!!!!" << std::endl; cv::Mat image = cv::imread(locateFile("test.jpg", gArgs.dataDirs), cv::IMREAD_COLOR); if (image.empty()) { std::cout << "The input image is empty!!! Please check....."<= 0) { runtime->setDLACore(gArgs.useDLACore); }
ICudaEngine* engine = runtime->deserializeCudaEngine(trtModelStream->data(), trtModelStream->size(), nullptr); assert(engine != nullptr); trtModelStream->destroy(); IExecutionContext* context = engine->createExecutionContext(); assert(context != nullptr); float prob[OUTPUT_SIZE]; typedef std::chrono::high_resolution_clock Time; typedef std::chrono::duration> ms; typedef std::chrono::duration fsec; double total = 0.0;
// run inference and cout time auto t0 = Time::now(); doInference(*context, data, prob, 1); auto t1 = Time::now(); fsec fs = t1 - t0; ms d = std::chrono::duration_cast(fs); total += d.count(); // destroy the engine context->destroy(); engine->destroy(); runtime->destroy(); std::cout << std::endl << "Running time of one image is:" << total << "ms" << std::endl; gLogInfo << "Output:\n"; for (int i = 0; i < OUTPUT_SIZE; i++) { gLogInfo << prob[i] << " "; } gLogInfo << std::endl;
return gLogger.reportTest(sampleTest, true);}
其中image.cpp的代码为:
#include #include "image.hpp"
static const float kMean[3] = { 0.485f, 0.456f, 0.406f };static const float kStdDev[3] = { 0.229f, 0.224f, 0.225f };static const int map_[7][3] = { {0,0,0} , {128,0,0}, {0,128,0}, {0,0,128}, {128,128,0}, {128,0,128}, {0,128,0}};
float* normal(cv::Mat img) { //cv::Mat image(img.rows, img.cols, CV_32FC3); float * data; data = (float*)calloc(img.rows*img.cols * 3, sizeof(float));
for (int c = 0; c < 3; ++c) { for (int i = 0; i < img.rows; ++i) { //获取第i行首像素指针 cv::Vec3b *p1 = img.ptr(i); //cv::Vec3b *p2 = image.ptr(i); for (int j = 0; j < img.cols; ++j) { data[c * img.cols * img.rows + i * img.cols + j] = (p1[j][c] / 255.0f - kMean[c]) / kStdDev[c]; } } } return data;}
image.hpp的内容为:
#pragma oncetypedef struct { int w; int h; int c; float *data;} image;float* normal(cv::Mat img);
运行结果为:
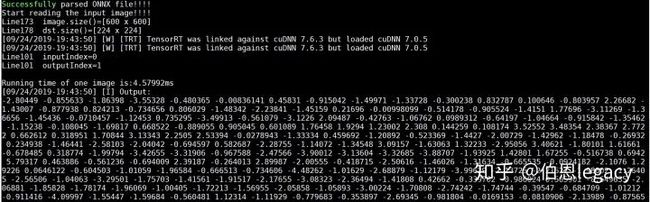
同样的test.jpg在python环境下的运行结果为:
可以发现,c++环境下resnet50输出的(1,1000)的特征与python环境下feat1(TensorRT)和feat2(pytorch)的结果差距很小。
上面的是将pytorch首先转化为onnx,然后让TensorRT解析onnx从而构建TensorRT引擎。那么我们如何让TensorRT直接加载引擎文件呢,也就是说,我们先把onnx转化为TensorRT的trt文件,然后让c++环境下的TensorRT直接加载trt文件,从而构建engine。
在这里我们首先使用onnx-tensorrt这个项目来使resnet50.onnx转化为resnet50.trt。采用的项目是https://github.com/onnx/onnx-tensorrt这个项目的安装也不难。按要求安装好protobuf就可以。安装成功的结果如下:
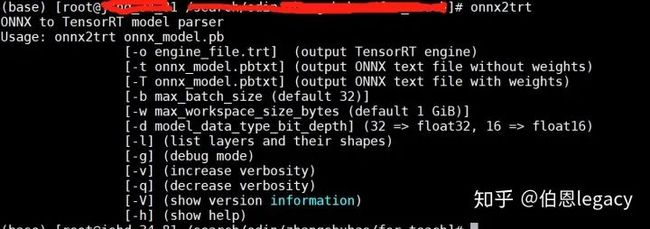
运行如下命令,就可以获得rensnet50.trt这个引擎文件
onnx2trt resnet50.onnx -o resnet50.trt
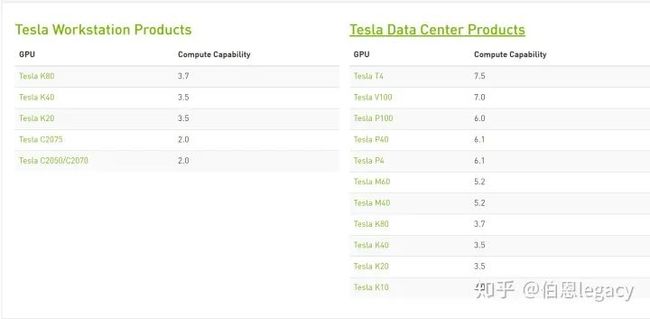
需要注意的是,onnx-tensort这个项目在编译的时有一个指定GPU计算能力的选项,如下图所示:

https://developer.nvidia.com/cuda-gpus可以查看不同显卡的计算能力,比如你用7.5计算力生成的trt文件,是不能用6.5的显卡来解析的。
另外在onnx2trt命令有个-b操作,是指定生成的trt文件的batch size的。在实际test过程中,你的batch size是多少,这个就设置成多少。我记得我当时trt文件的batch size是1,但是我实际的batch size是8,运行后,只有一张图片有结果,其他7张图片都是0。
如果能顺利生成trt文件的话,在代码中可以直接添加以下函数,来生成engine, 其他就不需要改变。
bool read_TRT_File(const std::string& engineFile, IHostMemory*& trtModelStream){ std::fstream file; std::cout << "loading filename from:" << engineFile << std::endl; nvinfer1::IRuntime* trtRuntime; //nvonnxparser::IPluginFactory* onnxPlugin = createPluginFactory(gLogger.getTRTLogger()); file.open(engineFile, std::ios::binary | std::ios::in); file.seekg(0, std::ios::end); int length = file.tellg(); std::cout << "length:" << length << std::endl; file.seekg(0, std::ios::beg); std::unique_ptr data(new char[length]); file.read(data.get(), length); file.close(); std::cout << "load engine done" << std::endl; std::cout << "deserializing" << std::endl; trtRuntime = createInferRuntime(gLogger.getTRTLogger()); //ICudaEngine* engine = trtRuntime->deserializeCudaEngine(data.get(), length, onnxPlugin); ICudaEngine* engine = trtRuntime->deserializeCudaEngine(data.get(), length, nullptr); std::cout << "deserialize done" << std::endl; assert(engine != nullptr); std::cout << "The engine in TensorRT.cpp is not nullptr" <serialize(); return true; }
如果想保存引擎文件的话,可以在自己的代码中添加这几句话,就可以生成trt文件,然后下次直接调用trt文件。
nvinfer1::IHostMemory* data = engine->serialize(); std::ofstream file; file.open(filename, std::ios::binary | std::ios::out); cout << "writing engine file..." << endl; file.write((const char*)data->data(), data->size()); cout << "save engine file done" << endl; file.close();
五.总结
TensorRT的部署并不难,难的是模型转化,在这个过程中有太多的操作是TensorRT不支持的,或者pytorch模型转化成的onnx本身就有问题。经常会出现,expand, Gather, reshape不支持等。感觉TensorRT对pytorch的维度变化特别不友好,我自己在模型转化过程中绝大多数bug都出在维度变化上。如果你有什么问题的话,请在下方留言吧!好吧,暂时就先写这么多,以后再补充吧。
最近TensorRT7出来了,支持了挺多5版本,6版本无法支持的操作。发现了一个tiny-tensorrt,貌似在C++和python环境下部署很easy,暂时还没测试过,但是先记录一下。https://github.com/zerollzeng/tiny-tensorrt


点个在看 paper不断!