多智能体强化学习文献阅读记录(一):Shapley Q-Value: A Local Reward Approach to Solve Global Reward Games
Shapley Q-Value: A Local Reward Approach to Solve Global Reward Games
Wang, J., Zhang, Y., Kim, T. K., & Gu, Y. (2020, April). Shapley Q-value: A local reward approach to solve global reward games. In Proceedings of the AAAI Conference on Artificial Intelligence (Vol. 34, No. 05, pp. 7285-7292).
-
Problems
-
全局奖励博弈
全局奖励博弈是合作博弈的一个子类,所有智能体的共同目标是最大化全局奖励。
-
奖励分配
目前多采用共享全局奖励的方式,这可能会导致不正确的奖励函数,导致学习率下降。而局部奖励是指根据每个智能体的贡献来分配全局奖励。(VDN、QMIX、QTRAN等方法本质上也是进行奖励分配)
在一般的合作式多智能体强化学习中,通常是找到一组NE作为稳定解,而NE通常更关注个人奖励,不能体现明确的合作激励。因此,共享全局奖励通常适用于智能体强制合作的情况。使用局部奖励可以反映每个智能体的贡献度。
-
-
Preliminaries
-
CG
对于 G = < N , v > G=
V ( S ) + V ( T ) ⩽ v ( S ∪ T ) + V ( S ∩ T ) V(S)+V(T)\leqslant v(S\cup T)+V(S\cap T) V(S)+V(T)⩽v(S∪T)+V(S∩T)
则G称为凸博弈。 设凸博弈G的一个解为 < C S , x ⃗ >
任意对策v的核心为:
C ( v ) = { x ⃗ ∈ R n ∣ x ⃗ ( N ) = V ( N ) , x ⃗ ( S ) ⩾ V ( S ) , ∀ S ⊂ N } C(v)=\left\{ \vec{x}\in R^n\left| \vec{x}\left( N \right) =V\left( N \right) , \right. \vec{x}\left( S \right) \geqslant V\left( S \right) ,\forall S\subset N \right\} C(v)={x∈Rn∣x(N)=V(N),x(S)⩾V(S),∀S⊂N}
在核心下,没有一个子联盟有偏离目前的联盟结构而自己组建联盟的动机。 -
Shapley Value
Shapely值是合作博弈的一个特殊的单点解,其形式为:
ϕ i ( v ) = ∑ S ⊂ N − { i } ∣ S ∣ ! ( ∣ N ∣ − ∣ S ∣ − 1 ) ∣ N ∣ ! ( v ( S ∪ i ) − v ( S ) ) \phi _i\left( v \right) =\sum_{S\subset N-\left\{ i \right\}}{\frac{\left| S \right|!\left( \left| N \right|-\left| S \right|-1 \right)}{\left| N \right|!}}\left( v\left( S\cup i \right) -v\left( S \right) \right) ϕi(v)=S⊂N−{i}∑∣N∣!∣S∣!(∣N∣−∣S∣−1)(v(S∪i)−v(S))
Shapley值满足1.有效性: x ( N ) = v ( N ) x(N)=v(N) x(N)=v(N)、2.公平性:如果一个智能体没有贡献,分配的值就是0。如果要计算一个智能体的shapley值,必须考虑 2 ∣ N ∣ − 1 2^{|N|}-1 2∣N∣−1个可能的联盟,因此本文中使用一种近似Shapley-Q值来代替。 -
Multi-agent Actor-Critic
策略梯度方法通过直接最大化 J ( θ ) = J(\theta)= J(θ)= E s ∼ ρ π , a ∼ π θ [ r ( s , a ) ] \mathbb{E}_{s \sim \rho^\pi, a \sim \pi_\theta}[r(s, a)] Es∼ρπ,a∼πθ[r(s,a)]来学习策略 π \pi π,由于 J ( θ ) J(\theta) J(θ)的梯度不能直接计算,因此用以下方式来近似梯度计算:
∇ θ J ( θ ) = E s ∼ ρ π , a ∼ π θ [ Q π ( s , a ) ∇ θ log π θ ( a ∣ s ) ] \nabla_\theta J(\theta)=\mathbb{E}_{s \sim \rho^\pi, a \sim \pi_\theta}\left[Q^\pi(s, a) \nabla_\theta \log \pi_\theta(a \mid s)\right] ∇θJ(θ)=Es∼ρπ,a∼πθ[Qπ(s,a)∇θlogπθ(a∣s)]
在AC框架中, π θ ( a ∣ s ) \pi_\theta(a \mid s) πθ(a∣s) 表示Actor, Q π ( s , a ) Q^\pi(s, a) Qπ(s,a) 表示Critic。 Actor负责执行动作,Critic负责为Actor执行的动作打分。
-
-
Solutions
-
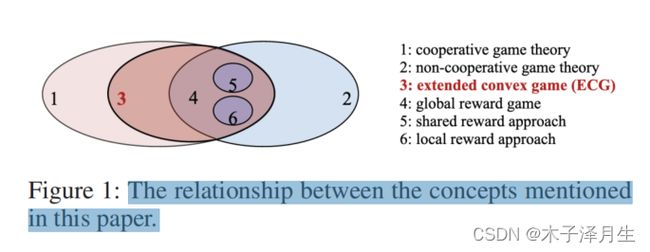
ECG
将原先的凸博弈拓展到无限视野和决策的场景,称为ECG
Stage1: 一个oracle安排联盟结构,签订合作协议。如果一个智能体加入其中某个联盟,则依据它的最佳长期贡献来分配给它奖励。假设oracle可以观测到整个环境,并且对所有智能体都很了解。
Stage2:每个智能体在加入被指定的联盟后,将根据策略函数 π i ( a i ∣ s ) \pi_i(a_i|s) πi(ai∣s)来最大化所在联盟的价值,从而实现每个联盟的最优价值以及个人奖励分配。(假设所有智能体都能观测到全局状态)
CS中的一个联盟C的最优价值为:
m a x π C v π C ( C ) = E π C [ ∑ t = 1 ∞ γ t − 1 r t ( C ) ] max_{\pi_C}v^{\pi_C}(C)=E_{\pi_C}[\sum^\infty_{t=1}\gamma^{t-1}r_t(C)] maxπCvπC(C)=EπC[t=1∑∞γt−1rt(C)]
其中, π C = × i ∈ C π i \pi_C=\times_{i \in C}\pi_i πC=×i∈Cπi, r t ( C ) r_t(C) rt(C)表示由联盟C在时刻t获得的奖赏。根据凸博弈的性质,有:
m a x π C ∪ D v π C ( C ∪ D ) ≥ m a x π C v π C ( C ) + m a x π D v π C ( D ) , ∀ C , D ⊂ N , C ∩ D = ∅ max_{\pi_{C \cup D}} v^{\pi_C}(C \cup D) \ge max_{\pi_C} v^{\pi_C}(C)+max_{\pi_D} v^{\pi_C}(D),\\\forall C,D \subset N,C\cap D=\emptyset maxπC∪DvπC(C∪D)≥maxπCvπC(C)+maxπDvπC(D),∀C,D⊂N,C∩D=∅
引理1:1. 凸对策的核心非空 2.若 < C S , x >
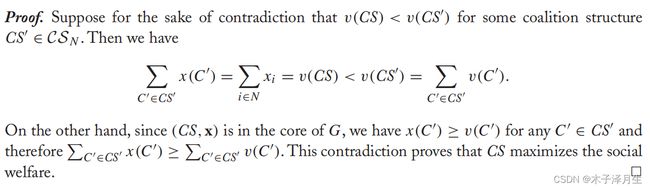
定理1: 对于一个存在有效分配方案的ECG,在核心中一定存在一个关于大联盟的解,并且其目标是 m a x π v π ( { N } ) max_\pi v^\pi (\{N\}) maxπvπ({N}),即最大化团队总价值,即:
m a x π v π ( { N } ) ≥ m a x π v π ( { C S ′ } ) , ∀ C S ′ ∈ C S N max_\pi v^\pi (\{N\}) \ge max_\pi v^\pi (\{CS'\}),\forall CS' \in CS_N maxπvπ({N})≥maxπvπ({CS′}),∀CS′∈CSN定理1的proof

从定理1可以看出,在适当的有效分配方案下,具有大联盟的ECG实际上等价于全局奖励博弈,其目标都是最大化全局奖励。这里假设所有智能体构成一个大联盟,因此ECG中的局部奖励方法在全局奖励博弈中是可行的。
推论1:对于每个具有大联盟的ECG,shapley值一定是其核心。
-
-
Shared Reward Approach
共享奖励方法是指直接把全局奖励分配给每个智能体,每个智能体的目的都是最大化全局奖励,即:
m a x π i v π ( { N } ) = m a x π i E π [ ∑ t = 1 ∞ r t ( N ) ] max_{\pi_i} v^\pi (\{N\}) = max_{\pi_i} E_\pi[\sum^\infty_{t=1}r_t(N)] maxπivπ({N})=maxπiEπ[t=1∑∞rt(N)]
其中, r t ( N ) r_t(N) rt(N)是全局奖励, π \pi π是所有智能体的联合策略。基于本文定义的ECG,可以将其改写为如下的等价优化问题:
m a x π i v π ( { N } ) = m a x π i ∑ i ∈ N x i = m a x π i x i = m a x π i 1 ∣ N ∣ v π ( { N } ) max_{\pi_i} v^\pi (\{N\}) = max_{\pi_i}\sum_{i \in N}x_i=max _{\pi_i}x_i=max_{\pi_i}\frac{1}{\left| N \right|}v^\pi (\{N\}) maxπivπ({N})=maxπii∈N∑xi=maxπixi=maxπi∣N∣1vπ({N})
其中, x x x是针对大联盟N的有效分配方案。这说明共享全局奖励方法实际上是一个针对大联盟的有效分配方案。但这种方式不一定能找到最优解,因为 ( { N } , x ) (\{N\},x) ({N},x)不一定满足核心的条件。 -
Shapley Q-value
使用Shaley值来对每个智能体进行奖励分配,由于 v π C ′ ( C ′ ) v^{\pi_{C'}}(C') vπC′(C′)表示联盟 C ′ C' C′在ECG中采取行动得到的奖励,因此可以用Q值来表示v。则定义每个智能体的Shapley Q-value定义为:
Φ i ( C ) = Q π C ∪ { i } ( s , a C ∪ { i } ) − Q π C ( s , a C ) Q Φ i ( s , a i ) = ∑ C ⊆ N \ { i } ∣ C ∣ ! ( ∣ N ∣ − ∣ C ∣ − 1 ) ! ∣ N ∣ ! ⋅ Φ i ( C ) \begin{aligned} &\Phi_i(\mathcal{C})=Q^{\pi_{\mathcal{C} \cup\{i\}}}\left(s, \mathbf{a}_{\mathcal{C} \cup\{i\}}\right)-Q^{\pi_{\mathcal{C}}}\left(s, \mathbf{a}_C\right) \\ &Q^{\Phi_i}\left(s, a_i\right)=\sum_{\mathcal{C} \subseteq \mathcal{N} \backslash\{i\}} \frac{|\mathcal{C}| !(|\mathcal{N}|-|\mathcal{C}|-1) !}{|\mathcal{N}| !} \cdot \Phi_i(\mathcal{C}) \end{aligned} Φi(C)=QπC∪{i}(s,aC∪{i})−QπC(s,aC)QΦi(s,ai)=C⊆N\{i}∑∣N∣!∣C∣!(∣N∣−∣C∣−1)!⋅Φi(C)
近似边际贡献: 可以看出,在计算智能体对于其他联盟的边际贡献时,必须考虑 2 ∣ N ∣ − 1 2^{|N|}-1 2∣N∣−1个可能的联盟。并且针对每一个联盟,都需要学习两个Q函数,然后计算两者之间的差异。这显然是复杂并且不稳定的,因此这里使用了一种方法直接计算近似的边际贡献:
假设每个智能体按照顺序加入联盟,直到组成一个大联盟。有如下记号:
P ( C ∣ N \ { i } ) = ∣ C ∣ ! ( ∣ N ∣ − ∣ C ∣ − 1 ) ! / ∣ N ∣ ! \operatorname{P}(\mathcal{C} \mid \mathcal{N} \backslash\{i\})=|\mathcal{C}| !(|\mathcal{N}|-|\mathcal{C}|-1) ! /|\mathcal{N}| ! P(C∣N\{i})=∣C∣!(∣N∣−∣C∣−1)!/∣N∣!
P表示智能体i随机加入一个现有联盟C的概率,随后再与后来的智能体组成大联盟。据此定义如下的函数来直接近似边际贡献:
Φ ^ i ( s , a C ∪ { i } ) : S × A C ∪ { i } ↦ R , \hat{\Phi}_i\left(s, \mathbf{a}_{\mathcal{C} \cup\{i\}}\right): \mathcal{S} \times \mathcal{A}_{\mathcal{C} \cup\{i\}} \mapsto \mathbb{R}, Φ^i(s,aC∪{i}):S×AC∪{i}↦R,
其中S是状态空间,C是智能体i希望加入的有序联盟, A C ∪ { i } = ( A j ) j ∈ C ∪ { i } \mathcal{A}_{\mathcal{C} \cup\{i\}}=\left(\mathcal{A}_j\right)_{j \in \mathcal{C} \cup\{i\}} AC∪{i}=(Aj)j∈C∪{i}表示联盟 C ∪ { i } C \cup \{i\} C∪{i}中智能体的动作空间。 在实际操作中,动作是有序的,用每个智能体动作向量的连接表示 a C ∪ { i } \mathbf{a}_{\mathcal{C} \cup\{i\}} aC∪{i},例如,C=(0,2)是一个有序联盟,则 a C ∪ { 1 } = ( a 0 , a 2 , a 1 ) \mathbf{a}_{\mathcal{C} \cup\{1\}}=\left(a_0, a_2, a_1\right) aC∪{1}=(a0,a2,a1)。为了保证在不同情况下映射 Φ ^ i ( s , a C ∪ { i } ) \hat{\Phi}_i\left(s, \mathbf{a}_{\mathcal{C} \cup\{i\}}\right) Φ^i(s,aC∪{i})的输入一致,规定将所有智能体的动作进行连接,并用0来填充无关智能体。
近似Shapley Q-value
根据上述定义,可以将Shaply Q-Value记作:
Q Φ i ( s , a i ) = E C ∼ Pr ( C ∣ N \ { i } ) [ Φ i ( C ) ] Q^{\Phi_i}\left(s, a_i\right)=\mathbb{E}_{\mathcal{C} \sim \operatorname{Pr}(\mathcal{C} \mid \mathcal{N} \backslash\{i\})}\left[\Phi_i(\mathcal{C})\right] QΦi(s,ai)=EC∼Pr(C∣N\{i})[Φi(C)]
为使上述SQ值便于计算,可以通过对概率分布P进行采样的方式来近似计算,即:
Q Φ i ( s , a i ) ≈ 1 M ∑ k = 1 M Φ ^ i ( s , a C k ∪ { i } ) , ∀ C k ∼ Pr ( C ∣ N \ { i } ) Q^{\Phi_i}\left(s, a_i\right) \approx \frac{1}{M} \sum_{k=1}^M \hat{\Phi}_i\left(s, \mathbf{a}_{\mathcal{C}_k \cup\{i\}}\right), \forall \mathcal{C}_k \sim \operatorname{Pr}(\mathcal{C} \mid \mathcal{N} \backslash\{i\}) QΦi(s,ai)≈M1k=1∑MΦ^i(s,aCk∪{i}),∀Ck∼Pr(C∣N\{i}) -
SQDDPG
在关于大联盟的ECG中,每个智能体只需要最大化自身的Shapley Vaule 即可使得全局奖励最大化,即:
m a x π v π ( { N } ) = m a x π ∑ i ∈ N x i = ∑ i ∈ N m a x π i x i = ∑ i ∈ N m a x π i Q Φ i ( s , a i ) max_{\pi} v^\pi (\{N\}) = max_{\pi}\sum_{i \in N}x_i=\sum _{i \in N}max _{\pi_i}x_i=\sum _{i \in N}max _{\pi_i}Q^{\varPhi _i}(s,a_i) maxπvπ({N})=maxπi∈N∑xi=i∈N∑maxπixi=i∈N∑maxπiQΦi(s,ai)
一个全局奖励博弈可以看作是一个势博弈,在势博弈中存在一个纯策略纳什均衡。因此,考虑使用DDPG方法(Deep deterministic policy gradient)去搜索最优的确定性策略。用Shapley Q-value代替DDPG中的Q函数,每个智能体的策略梯度为:
∇ θ i J ( θ i ) = E s ∼ ρ μ [ ∇ θ i μ θ i ( s ) ∇ a i Q Φ i ( s , a i ) ∣ a i = μ θ i ( s ) ] , \nabla_{\theta_i} J\left(\theta_i\right)=\mathbb{E}_{s \sim \rho^\mu}\left[\left.\nabla_{\theta_i} \mu_{\theta_i}(s) \nabla_{a_i} Q^{\Phi_i}\left(s, a_i\right)\right|_{a_i=\mu_{\theta_i}(s)}\right], ∇θiJ(θi)=Es∼ρμ[∇θiμθi(s)∇aiQΦi(s,ai)∣∣ai=μθi(s)],
其中 Q Φ i ( s , a i ) Q^{\Phi_i}\left(s, a_i\right) QΦi(s,ai)是智能体i的Shapley Q值, μ θ i \mu_{\theta_i} μθi是其决定性策略。在每一个时间步,都可以获得一个全局奖励。由于每个智能体的Shapley Q-value都与本地奖励相关,因此不能直接根据全局奖励来更新每个智能体的 Q ^ Φ i ( s , a i ) \hat{Q}^{\Phi_i}\left(s, a_i\right) Q^Φi(s,ai)。根据Shapley值的有效性,可以通过以下最小化问题来更新 Q ^ Φ i ( s , a i ) \hat{Q}^{\Phi_i}\left(s, a_i\right) Q^Φi(s,ai)(相当于值函数分解)。
min ω 1 , ω 2 , … , ω ∣ N ∣ E s t , a N t , r t ( N ) , s t + 1 [ 1 2 ( r t ( N ) + γ ∑ i ∈ N Q Φ i ( s t + 1 , a i t + 1 ; ω i ) ∣ a i t + 1 = μ θ i ( s t + 1 ) − ∑ i ∈ N Q Φ i ( s t , a i t ; ω i ) ) 2 ] \begin{aligned} \min _{\omega_1, \omega_2, \ldots, \omega_{\mid \mathcal{N}} \mid} & \mathbb{E}_{s^t, \mathbf{a}_{\mathcal{N}}^t, r^t(\mathcal{N}), s^{t+1}}\left[\frac { 1 } { 2 } \left(r^t(\mathcal{N})\right.\right.\\ &+\left.\gamma \sum_{i \in \mathcal{N}} Q^{\Phi_i}\left(s^{t+1}, a_i^{t+1} ; \omega_i\right)\right|_{a_i^{t+1}=\mu_{\theta_i}\left(s^{t+1}\right)} \\ &\left.\left.-\sum_{i \in \mathcal{N}} Q^{\Phi_i}\left(s^t, a_i^t ; \omega_i\right)\right)^2\right] \end{aligned} ω1,ω2,…,ω∣N∣minEst,aNt,rt(N),st+1[21(rt(N)+γi∈N∑QΦi(st+1,ait+1;ωi)∣∣∣∣∣ait+1=μθi(st+1)−i∈N∑QΦi(st,ait;ωi))2⎦⎤
其中, γ ( N ) \gamma(N) γ(N)是全局奖励, Q Φ i ( s , a i ; w i ) Q^{\varPhi_i}(s,a_i;w_i) QΦi(s,ai;wi)表示智能体i的Shapley Q值(被参数化为 w i w_i wi),
-
Experiments
-
Cooperative Navigation
有三个智能体和三个目标点,没有为智能体分配指定的目标点,每个智能体要移动到其中一个目标。每个智能体在环境中的状态包括当前的位置,速度,与三个目标之间的距离以及与其他智能体之间的距离。每个智能体的动作空间向上、向下、向左、向右、留在原地。全局奖励是每个目标和离他最近的智能体之间的距离的和的相反数。如果发生了碰撞,则全局奖励将减少1。
-
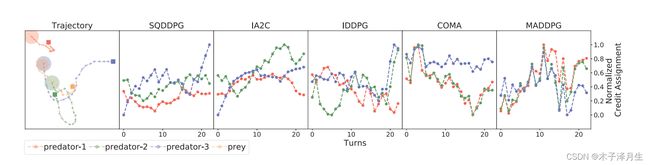
Prey-and-Predator
在这个任务中,我们只能控制三个捕食者,猎物是随机的。每个捕食者的目的是通过协调,以尽可能少的步骤捕获猎物。每个捕食者的状态包括其当前的位置和速度,各自对猎物和其他捕食者的位移,以及猎物的速度。动作空间与协同导航中定义的空间相同。整体奖励是任何捕食者和猎物之间的负最小距离。如果猎物被任何捕食者抓住,全局奖励将增加10,游戏终止。
-
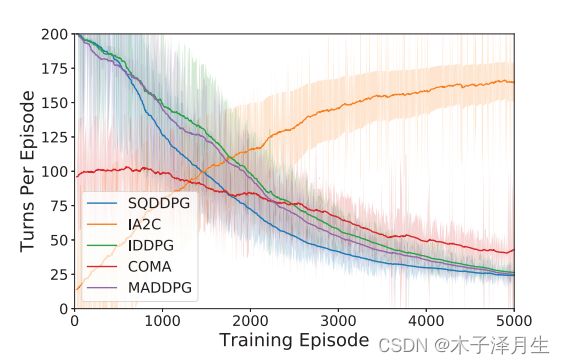
Traffific Junction
在此任务中,汽车沿着在一个或多个交通路口相交的预定义路线移动。在每个时间步,新的车以概率p出现到环境中,汽车总数限制在Nmax以下。在一辆汽车完成任务后,它将被从环境中移除,并可能被采样回一条新的路线。每辆车的视野有限,为1,这意味着它只能观察其周围3x3区域内的情况。在我们的实验中,与其他实验不同的是,汽车之间不允许进行通信(苏赫巴托、szlam和费格斯,2016年;Das等人,2018年)。每辆车的动作空间为燃气和制动,全局奖励函数为 ∑ i = 1 N − 0.01 t i \sum^N_{i=1}-0.01t_i ∑i=1N−0.01ti。其中ti为车i在一次任务中在路上持续活动的时间步长,N为汽车总数。此外,如果发生碰撞,全球奖励将减少10。我们通过成功率(即没有发生碰撞的事件)来评估性能。

-
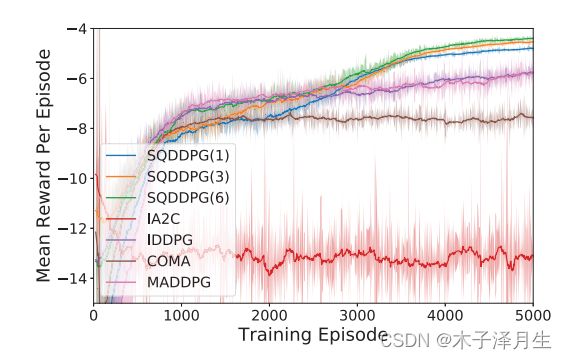
results
在实验过程中,SQDDPG表现出了公平的信用分配和快速的收敛速度。