numpy+cnn
import numpy
import sys
def conv_(img, conv_filter):
filter_size = conv_filter.shape[1]
result = numpy.zeros((img.shape))
#Looping through the image to apply the convolution operation.
for r in numpy.uint16(numpy.arange(filter_size/2.0,
img.shape[0]-filter_size/2.0+1)):
for c in numpy.uint16(numpy.arange(filter_size/2.0,
img.shape[1]-filter_size/2.0+1)):
"""
Getting the current region to get multiplied with the filter.
How to loop through the image and get the region based on
the image and filer sizes is the most tricky part of convolution.
"""
curr_region = img[r-numpy.uint16(numpy.floor(filter_size/2.0)):r+numpy.uint16(numpy.ceil(filter_size/2.0)),
c-numpy.uint16(numpy.floor(filter_size/2.0)):c+numpy.uint16(numpy.ceil(filter_size/2.0))]
#Element-wise multipliplication between the current region and the filter.
curr_result = curr_region * conv_filter
conv_sum = numpy.sum(curr_result) #Summing the result of multiplication.
result[r, c] = conv_sum #Saving the summation in the convolution layer feature map.
#Clipping the outliers of the result matrix.
final_result = result[numpy.uint16(filter_size/2.0):result.shape[0]-numpy.uint16(filter_size/2.0),
numpy.uint16(filter_size/2.0):result.shape[1]-numpy.uint16(filter_size/2.0)]
return final_result
def conv(img, conv_filter):
if len(img.shape) > 2 or len(conv_filter.shape) > 3: # Check if number of image channels matches the filter depth.
if img.shape[-1] != conv_filter.shape[-1]:
print("Error: Number of channels in both image and filter must match.")
sys.exit()
if conv_filter.shape[1] != conv_filter.shape[2]: # Check if filter dimensions are equal.
print('Error: Filter must be a square matrix. I.e. number of rows and columns must match.')
sys.exit()
if conv_filter.shape[1]%2==0: # Check if filter diemnsions are odd.
print('Error: Filter must have an odd size. I.e. number of rows and columns must be odd.')
sys.exit()
# An empty feature map to hold the output of convolving the filter(s) with the image.
feature_maps = numpy.zeros((img.shape[0]-conv_filter.shape[1]+1,
img.shape[1]-conv_filter.shape[1]+1,
conv_filter.shape[0]))
# Convolving the image by the filter(s).
for filter_num in range(conv_filter.shape[0]):
print("Filter ", filter_num + 1)
curr_filter = conv_filter[filter_num, :] # getting a filter from the bank.
"""
Checking if there are mutliple channels for the single filter.
If so, then each channel will convolve the image.
The result of all convolutions are summed to return a single feature map.
"""
if len(curr_filter.shape) > 2:
conv_map = conv_(img[:, :, 0], curr_filter[:, :, 0]) # Array holding the sum of all feature maps.
for ch_num in range(1, curr_filter.shape[-1]): # Convolving each channel with the image and summing the results.
conv_map = conv_map + conv_(img[:, :, ch_num],
curr_filter[:, :, ch_num])
else: # There is just a single channel in the filter.
conv_map = conv_(img, curr_filter)
feature_maps[:, :, filter_num] = conv_map # Holding feature map with the current filter.
return feature_maps # Returning all feature maps.
def pooling(feature_map, size=2, stride=2):
#Preparing the output of the pooling operation.
pool_out = numpy.zeros((numpy.uint16((feature_map.shape[0]-size+1)/stride+1),
numpy.uint16((feature_map.shape[1]-size+1)/stride+1),
feature_map.shape[-1]))
for map_num in range(feature_map.shape[-1]):
r2 = 0
for r in numpy.arange(0,feature_map.shape[0]-size+1, stride):
c2 = 0
for c in numpy.arange(0, feature_map.shape[1]-size+1, stride):
pool_out[r2, c2, map_num] = numpy.max([feature_map[r:r+size, c:c+size, map_num]])
c2 = c2 + 1
r2 = r2 +1
return pool_out
def relu(feature_map):
#Preparing the output of the ReLU activation function.
relu_out = numpy.zeros(feature_map.shape)
for map_num in range(feature_map.shape[-1]):
for r in numpy.arange(0,feature_map.shape[0]):
for c in numpy.arange(0, feature_map.shape[1]):
relu_out[r, c, map_num] = numpy.max([feature_map[r, c, map_num], 0])
return relu_out
import skimage.data
import numpy
import matplotlib
import NumPyCNN as numpycnn
# Reading the image
#img = skimage.io.imread("test.jpg")
#img = skimage.data.checkerboard()
img = skimage.data.chelsea()
#img = skimage.data.camera()
# Converting the image into gray.
img = skimage.color.rgb2gray(img)
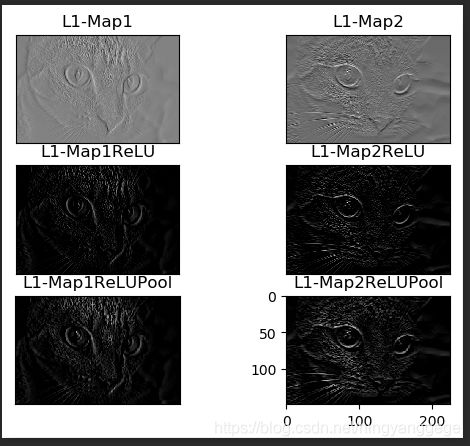
# First conv layer
#l1_filter = numpy.random.rand(2,7,7)*20 # Preparing the filters randomly.
l1_filter = numpy.zeros((2,3,3))
l1_filter[0, :, :] = numpy.array([[[-1, 0, 1],
[-1, 0, 1],
[-1, 0, 1]]])
l1_filter[1, :, :] = numpy.array([[[1, 1, 1],
[0, 0, 0],
[-1, -1, -1]]])
print("\n**Working with conv layer 1**")
l1_feature_map = numpycnn.conv(img, l1_filter)
print("\n**ReLU**")
l1_feature_map_relu = numpycnn.relu(l1_feature_map)
print("\n**Pooling**")
l1_feature_map_relu_pool = numpycnn.pooling(l1_feature_map_relu, 2, 2)
print("**End of conv layer 1**\n")
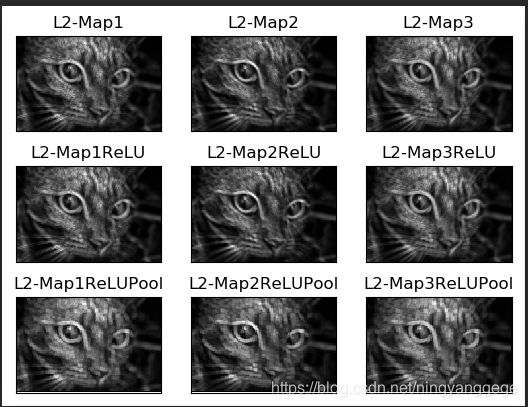
# Second conv layer
l2_filter = numpy.random.rand(3, 5, 5, l1_feature_map_relu_pool.shape[-1])
print("\n**Working with conv layer 2**")
l2_feature_map = numpycnn.conv(l1_feature_map_relu_pool, l2_filter)
print("\n**ReLU**")
l2_feature_map_relu = numpycnn.relu(l2_feature_map)
print("\n**Pooling**")
l2_feature_map_relu_pool = numpycnn.pooling(l2_feature_map_relu, 2, 2)
print("**End of conv layer 2**\n")
# Third conv layer
l3_filter = numpy.random.rand(1, 7, 7, l2_feature_map_relu_pool.shape[-1])
print("\n**Working with conv layer 3**")
l3_feature_map = numpycnn.conv(l2_feature_map_relu_pool, l3_filter)
print("\n**ReLU**")
l3_feature_map_relu = numpycnn.relu(l3_feature_map)
print("\n**Pooling**")
l3_feature_map_relu_pool = numpycnn.pooling(l3_feature_map_relu, 2, 2)
print("**End of conv layer 3**\n")
# Graphing results
fig0, ax0 = matplotlib.pyplot.subplots(nrows=1, ncols=1)
ax0.imshow(img).set_cmap("gray")
ax0.set_title("Input Image")
ax0.get_xaxis().set_ticks([])
ax0.get_yaxis().set_ticks([])
matplotlib.pyplot.savefig("in_img.png", bbox_inches="tight")
matplotlib.pyplot.close(fig0)
# Layer 1
fig1, ax1 = matplotlib.pyplot.subplots(nrows=3, ncols=2)
ax1[0, 0].imshow(l1_feature_map[:, :, 0]).set_cmap("gray")
ax1[0, 0].get_xaxis().set_ticks([])
ax1[0, 0].get_yaxis().set_ticks([])
ax1[0, 0].set_title("L1-Map1")
ax1[0, 1].imshow(l1_feature_map[:, :, 1]).set_cmap("gray")
ax1[0, 1].get_xaxis().set_ticks([])
ax1[0, 1].get_yaxis().set_ticks([])
ax1[0, 1].set_title("L1-Map2")
ax1[1, 0].imshow(l1_feature_map_relu[:, :, 0]).set_cmap("gray")
ax1[1, 0].get_xaxis().set_ticks([])
ax1[1, 0].get_yaxis().set_ticks([])
ax1[1, 0].set_title("L1-Map1ReLU")
ax1[1, 1].imshow(l1_feature_map_relu[:, :, 1]).set_cmap("gray")
ax1[1, 1].get_xaxis().set_ticks([])
ax1[1, 1].get_yaxis().set_ticks([])
ax1[1, 1].set_title("L1-Map2ReLU")
ax1[2, 0].imshow(l1_feature_map_relu_pool[:, :, 0]).set_cmap("gray")
ax1[2, 0].get_xaxis().set_ticks([])
ax1[2, 0].get_yaxis().set_ticks([])
ax1[2, 0].set_title("L1-Map1ReLUPool")
ax1[2, 1].imshow(l1_feature_map_relu_pool[:, :, 1]).set_cmap("gray")
ax1[2, 0].get_xaxis().set_ticks([])
ax1[2, 0].get_yaxis().set_ticks([])
ax1[2, 1].set_title("L1-Map2ReLUPool")
matplotlib.pyplot.savefig("L1.png", bbox_inches="tight")
matplotlib.pyplot.close(fig1)
# Layer 2
fig2, ax2 = matplotlib.pyplot.subplots(nrows=3, ncols=3)
ax2[0, 0].imshow(l2_feature_map[:, :, 0]).set_cmap("gray")
ax2[0, 0].get_xaxis().set_ticks([])
ax2[0, 0].get_yaxis().set_ticks([])
ax2[0, 0].set_title("L2-Map1")
ax2[0, 1].imshow(l2_feature_map[:, :, 1]).set_cmap("gray")
ax2[0, 1].get_xaxis().set_ticks([])
ax2[0, 1].get_yaxis().set_ticks([])
ax2[0, 1].set_title("L2-Map2")
ax2[0, 2].imshow(l2_feature_map[:, :, 2]).set_cmap("gray")
ax2[0, 2].get_xaxis().set_ticks([])
ax2[0, 2].get_yaxis().set_ticks([])
ax2[0, 2].set_title("L2-Map3")
ax2[1, 0].imshow(l2_feature_map_relu[:, :, 0]).set_cmap("gray")
ax2[1, 0].get_xaxis().set_ticks([])
ax2[1, 0].get_yaxis().set_ticks([])
ax2[1, 0].set_title("L2-Map1ReLU")
ax2[1, 1].imshow(l2_feature_map_relu[:, :, 1]).set_cmap("gray")
ax2[1, 1].get_xaxis().set_ticks([])
ax2[1, 1].get_yaxis().set_ticks([])
ax2[1, 1].set_title("L2-Map2ReLU")
ax2[1, 2].imshow(l2_feature_map_relu[:, :, 2]).set_cmap("gray")
ax2[1, 2].get_xaxis().set_ticks([])
ax2[1, 2].get_yaxis().set_ticks([])
ax2[1, 2].set_title("L2-Map3ReLU")
ax2[2, 0].imshow(l2_feature_map_relu_pool[:, :, 0]).set_cmap("gray")
ax2[2, 0].get_xaxis().set_ticks([])
ax2[2, 0].get_yaxis().set_ticks([])
ax2[2, 0].set_title("L2-Map1ReLUPool")
ax2[2, 1].imshow(l2_feature_map_relu_pool[:, :, 1]).set_cmap("gray")
ax2[2, 1].get_xaxis().set_ticks([])
ax2[2, 1].get_yaxis().set_ticks([])
ax2[2, 1].set_title("L2-Map2ReLUPool")
ax2[2, 2].imshow(l2_feature_map_relu_pool[:, :, 2]).set_cmap("gray")
ax2[2, 2].get_xaxis().set_ticks([])
ax2[2, 2].get_yaxis().set_ticks([])
ax2[2, 2].set_title("L2-Map3ReLUPool")
matplotlib.pyplot.savefig("L2.png", bbox_inches="tight")
matplotlib.pyplot.close(fig2)
# Layer 3
fig3, ax3 = matplotlib.pyplot.subplots(nrows=1, ncols=3)
ax3[0].imshow(l3_feature_map[:, :, 0]).set_cmap("gray")
ax3[0].get_xaxis().set_ticks([])
ax3[0].get_yaxis().set_ticks([])
ax3[0].set_title("L3-Map1")
ax3[1].imshow(l3_feature_map_relu[:, :, 0]).set_cmap("gray")
ax3[1].get_xaxis().set_ticks([])
ax3[1].get_yaxis().set_ticks([])
ax3[1].set_title("L3-Map1ReLU")
ax3[2].imshow(l3_feature_map_relu_pool[:, :, 0]).set_cmap("gray")
ax3[2].get_xaxis().set_ticks([])
ax3[2].get_yaxis().set_ticks([])
ax3[2].set_title("L3-Map1ReLUPool")
matplotlib.pyplot.savefig("L3.png", bbox_inches="tight")
matplotlib.pyplot.close(fig3)
图片保存结果如下:

It's amazing!
卷积层-激活层-池化层
提问:像素全为正,relu激活层还有什么用呢?
答:卷积滤波器的参数可以为负,卷积层的输出可以是负值,所以relu激活层仍然有意义;
提问:池化层后不是就只有一个值了吗?
答:池化层和卷积层一样也有一个类似滤波器进行池化,进行了一个下采样,而不是对整个featuremap选择最大的一个值;比如说2*2 步长为2,每四个元素中选择最大的一个;
提问:为什么没有训练也会不错的效果呢?
答:从逆向思维的角度来看,说明卷积层参数初始值设置得不错;如图所示:本文中的滤波器值如下
