数字摄影测量复习总结
文章目录
- 第二章 数字影像的获取与处理
-
- 一、采样 量化 重采样
- 二、数字影像内插--进行重采样
-
- 双线性插值计算过程
- 双线性插值、双三次、最临近
- 第三章 数字影像的特征提取与定位
-
- 1、影像特征
- 2、点特征提取算子(Moravec和Forstner)
-
- (1)Moravec算子
- (2)Forstner算子
- (3)定位--曲面拟合
- (4)线特征--Hough变换
- 第四章 数字影像定向
-
- 一、核线、核面
- 二、基于影像几何纠正的核线解析关系
- 三、基于共面条件的同名核线几何关系
- 四、核线影像生成
-
- 1、直接法核线影像生成(类似于9-1数字微分纠正正解法?)
- 2、间接法核线影像生成
- 3、直接在原始倾斜影像上生成核线影像
- 第五章 数字影像匹配基础
-
- 一、数字影像匹配 共轭实体 匹配实体
- 二、数字影像匹配的基本问题
-
- 1、搜索空间、匹配实体的唯一性
- 2、近似值、约束条件与假设
- 3、匹配实体的几何畸变
- 三、数字影像匹配基本问题的解决方案
-
- 1、搜索空间和近似值
- 2、匹配实体的唯一性
- 第六章 基于灰度的影像匹配(结合实验二掌握灰度匹配过程)
-
- 一、基于灰度的影像匹配
- 二、灰度匹配中常用的相似性测度
- 三、基于相关系数法的灰度匹配
- 四、最小二乘影像匹配
- 五、直接生成DEM的影像匹配
-
- 1、垂直线轨迹法影像匹配(VLL法)(最好画图)
- 2、垂直线轨迹与最小二乘相结合的影像匹配
- 六、NCC、LSM、VLL法异同及对比
- 第七章 特征匹配
-
- 一、特征匹配概念与步骤
- 二、特征匹配----SIFT匹配算法
- 三、思考题:自动相对定向
- 第八章 数字高程模型
-
- 一、数字高程模型概念
- 二、数字高程模型的内插方法
-
- 1、移动曲面内插方法
- 2、多面函数内插方法
- 3、有限元内插方法
- 4、三角网数字高程模型构建
- 5、DEM的精度及存储管理
- 三、DEM内插分类(矩形格网和三角网TIN)
-
- 1、基于矩形格网的DEM多项式内插
- 2、基于三角网的DEM多项式内插
- 四、基于矩形格网DEM自动绘制等高线
- 五、基于三角网的等高线绘制
- 七、单像量测
- 六、思考题
- 第九章 数字微分纠正
-
- 一、数字微分纠正概念
- 二、框幅式中心投影影像的数字微分纠正
- 三、基于RPC的正射纠正
- 四、正射影像镶嵌
-
- 一、真正射纠正的一般流程
- 第九、十章 一般数字摄影测量流程
第二章 数字影像的获取与处理
度协方差矩阵
度协方差矩阵
一、采样 量化 重采样
采样:对实际连续的模型离散化的过程
量化:用多大范围的数值来表示图像采样后的每一个点
量化结果:图像能容纳的颜色总数,反应图像质量
重采样:欲知不位于矩阵点(采样点)上的原始函数g(x,y)的数值时需要进行内插
二、数字影像内插–进行重采样
双线性插值计算过程



双线性插值、双三次、最临近
性能:最邻近<线性插值<三次卷积法(双三次)
最邻近插值:简单快速、不破坏原始影像的灰度信息
双三次:性能好速度慢
双线性:最宜
第三章 数字影像的特征提取与定位
1、影像特征
影像特征是指影像上表现为特定结构的像素或者经过影像处理(主要是初级运算(low level))以后用于影像解译的纹理、色彩等方面的特征。特定结构往往表现为面状、线状各种影像现象。
分类:点特征、线特征、面特征
2、点特征提取算子(Moravec和Forstner)
(1)Moravec算子
算法:
1、计算各像素的兴趣值IV;
2、给定经验阈值,将兴趣值大于阈值的点作为候选点;
3、选取候选点中兴趣值极大的点作为特征点。
局限:
1、只对四个待定方向灰度变化起作用
2、对噪声敏感
3、对边缘敏感
(2)Forstner算子
原理:
将那些在影像匹配中(或视察估计中)所估计的视差精度高且精度分布均匀的点认为是兴趣点。
算法:
1、计算窗口内各像素的Robert梯度
2、计算L×L(5×5或更大)窗口中的灰度协方差矩阵
3、计算兴趣值q与w
4、确定待选点。将兴趣值大于给定阈值的点作为待选点。
5、选取极值点。以权值w为依据,在一个适当的窗口中选择权值w最大的待选点为特征点,去掉其余的点。
改进:
按照上述算法检测出的特征点位置仅是像素级精度。Forstner算子检测出的点特征的子像素精度定位可以通过抛物线拟合的方法确定。以具有局部最大权值的Forstner特征点为中心,在一定大小的窗口(3×3窗口)范围内,按照一定的方式中心化坐标,然后利用该窗口所有点的权值w拟合二次曲面
(3)定位–曲面拟合
原理:

分类:Zuniga-Haralick算子、Dreschler-Nagel定位算子
(4)线特征–Hough变换
功能:
用于检测图像中直线、圆、抛物线、椭圆等
原理:
原始坐标系下呈现直线的所有点,它们的斜率和截距是相同的,所以它们在参数坐标系下对应于同一个点。这样在将原始坐标系下的各个点投影到参数坐标系下之后,看参数坐标系下有没有聚集点,这样的聚集点就对应了原始坐标系下的直线。
算法:
1、对数字影像预处理,提取线特征点并计算各点的梯度方向角;
2、将参数平面分成若干小单元,设置2维累计矩阵H(ρ,θ);
3、边缘细化,将计算提取边缘点的梯度模,梯度模在梯度方向达局部极大的认为是边缘点,否则剔除;
4、对每一边缘点设置(φ,θ)的区间;
5、对累计矩阵进行阈值检测,大于阈值的点作为备选点;
6、取累计矩阵中备选点中的极大值为所需的峰值点
第四章 数字影像定向
一、核线、核面
核面:给定立体像对的两张影像,对3维空间的任意一点,包含该点与两幅影像投影中心的平面为核面;
核线:核面与两幅影像相交形成的截痕直线为核线。
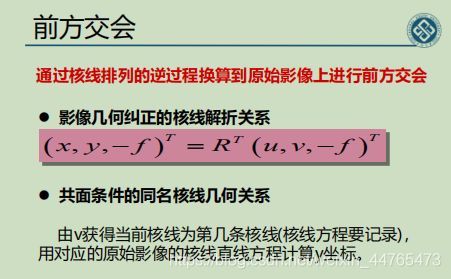
二、基于影像几何纠正的核线解析关系
三、基于共面条件的同名核线几何关系
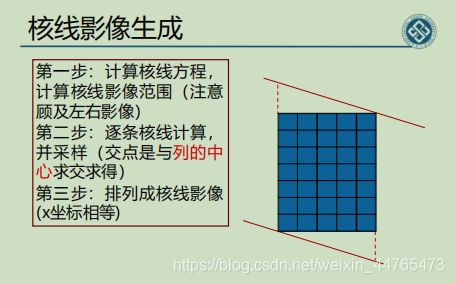
四、核线影像生成
核线影像:基于核线几何关系,利用倾斜影像生成沿核线方向排列的数字影像。
1、直接法核线影像生成(类似于9-1数字微分纠正正解法?)
(1)将倾斜影像上每个像素映射到核线影像上,并将原始灰度值赋予核线影像
(2)重采样形成规则格网
2、间接法核线影像生成
(1)确定范围。将倾斜影像的4个角点A、B、C、D映射到核线影像上的A’、B’、C’、D’上,并确定外接矩阵。
(2)以外接矩阵为核线影像范围,用原始倾斜影像同样的采样间隔Δ对该外接矩形进行细分,形成采样格网。
(3)利用采样格网中每个小单元的中心坐标(u,v)与原始核线的几何关系计算出像素在倾斜像片上的相应位置(x,y)
(4)灰度内插。根据周围像素灰度值内插出(x,y)处的灰度值g(x,y),实现量化
(5)灰度赋值。将内插的值赋给核线影像的(u,v)上
3、直接在原始倾斜影像上生成核线影像
对离散的数字倾斜影像,经过内定向和相对定向后,利用核线方程可直接在倾斜影像上生成过(x0,y0)点的核线数字影像。
具体过程:
(1)内定向和相对定向
(2)在像平面坐标系下(倾斜影像)计算处核线方程的核线与倾斜数字影像上每一列中心的交点(x’,y’)
(3)利用内插获得该交点处的影像灰度值。
注:除了单条核线影像生成以外,也可以用上述方式生成完整核线影像或任意区域的核线影像。
(4)排列成核线影像。
分类:
(1)基于相对定向(共面条件)



(2)基于F基础矩阵


(3)基于物方辅助

注意:最后不能忘记核线重排列!!!
PPT:核线影像生成及前方交会

第五章 数字影像匹配基础
一、数字影像匹配 共轭实体 匹配实体
数字影像匹配: 在两张或多张数字影像的要素之间自动建立对应关系,这些影像是对同一场景在不同位置和不同时刻的成像。
共轭实体: 指目标空间特征的影像,包括点、线、面及其他目标空间对象等。
匹配实体: 指一定的要素,正是通过对这些要素的比较以确定对应的共轭实体。包括数字影像的灰度值及其分布模式、描述数字影像上特定对象或特征的特征向量、数字影像上特征之间的关系等。

相似性测度: 说明匹配实体之间相似程度的一种定量度量指标

匹配方法: 计算或者实现匹配实体相似性测度的方法,匹配方法一般由匹配实体命名,例如ABM(area-based matching,基于灰度的影像匹配)、FBM(feature-based matching 基于特征的匹配)、RM(relation matching,关系匹配)和SM(symbolic matching,符号匹配)。
匹配策略: 一般指求解匹配问题的概念或总体方案,主要包括匹配环境分析、匹配的方法及匹配质量评价。
基本的影像匹配过程:
(1)在一副影像上选定待匹配准实体
(2)确定匹配实体
(3)在另一张影像上寻找该匹配准实体的共轭实体(主要通过计算相似性测度实现)
(4)计算配准实体在目标空间的3维位置
(5)评价匹配质量
二、数字影像匹配的基本问题
1、搜索空间、匹配实体的唯一性
在参考影像中选定匹配实体后就可以根据成像重叠度关系在搜索影像中搜索与该匹配实体最相似的匹配实体。如果这种搜索在整个重叠范围内进行,就可能形成组合爆炸。
在寻找共轭实体的过程中如何限定搜索空间、提高匹配的效率是影像匹配所面临的基本问题。
解决组合爆炸的方法:在寻找共轭实体时限制搜索空间
解决模糊匹配的方法:选择更具唯一性的匹配实体
2、近似值、约束条件与假设
影像匹配是一个病态(ill-posed)问题,可能存在无解、解不唯一等。
解决办法:
(1)限制解空间,如对解空间施加限制条件或设置范围。
(2)引入限制条件,例如:基于匹配实体几何性质的相似性测度可以利用几何约束这一优势。
3、匹配实体的几何畸变
(1)方位参数引起的几何畸变
(2)两影像间的不同旋转角引起的几何畸变
(3)地面倾斜引起的几何畸变
(4)地形起伏引起的几何畸变
三、数字影像匹配基本问题的解决方案
1、搜索空间和近似值
限制(减小)搜索空间常用的方法:核线几何约束条件与金字塔多级匹配策略。
解决方案:特征匹配、核线约束、金字塔匹配策略、双向一致性约束
核线几何约束条件--沿核线影像进行匹配的步骤:
(1)在一张影像上选定待匹配的点P及匹配实体
(2)估计该点的高程值Zp及变化范围
(3)利用共轭实体位置估计表达式计算近似共轭位置P’’
(4)利用搜索区间表达式计算搜索区间
(5)在搜索区间内进行影像匹配
(6)分析在第五步中计算出的相似性测度,确定共轭位置P’’
金字塔多级匹配策略:–实际上是增大像素尺寸
原理:先在较粗分辨率的影像上开始匹配,然后将结果投影(传导)到较细分辨率的影像上,直至到最高分辨率影像。
金字塔影像结构: 对二维影像逐次进行低通滤波,增大采样间隔,得到一个像元素总数逐渐变小的影像序列,将这些影像叠置起来颇像一座金字塔,称为金字塔影像结构
2、匹配实体的唯一性
唯一性的度量方法:
(1)方差:影像片的方差函数度量了影像片内灰度值的变化程度
(2)自相关:影像片的自相关函数提供了影像片自我比较的程度
(3)信息熵:影像片的信息熵是影像函数随机性的度量
第六章 基于灰度的影像匹配(结合实验二掌握灰度匹配过程)
一、基于灰度的影像匹配
定义:
以影像上局部范围内的灰度值及其分布作为匹配实体(或比较要素),通过计算匹配实体之间的相似性测度寻找共轭实体的影像匹配方法。
原理:
首先在主影像上以待匹配点为中心选取一定大小的影像片作为模板窗口,然后根据先验知识或其它约束条件估计该点同名的在辅影像上可能的存在范围即搜索区域,以搜索区域中的没一点为中心开取同样大小的窗口作为搜索窗口,计算模板窗口与每一个搜索窗口的相似性测度,以相似性测度值最大的那个窗口为模板窗口的配准窗口,配准窗口的中心为模板窗口中心的同名像素。
基于像方的匹配步骤:
1、在左影像上选择大概匹配点
2、沿核线找待匹配区域,计算相关系数
3、取相关系数的极值点作为匹配点
基于物方辅助的方法和基于物方辅助的核线排列相似
基于物方辅助的同名点匹配的流程掌握?
二、灰度匹配中常用的相似性测度
1、相关函数测度
2、协方差函数测度
3、相关系数测度
4、差平方和测度
5、差绝对值和测度
三、基于相关系数法的灰度匹配
定义: 以相关系数作为相似性测度的灰度匹配方法
步骤:
(1)在左影像上选择模板窗口的中心;
(2)在右影像上确定模板窗口中心共轭位置的近似值;
(3)确定模板窗口的大小和右影像上以近似值为中心的搜索区域的尺寸
(4)在搜索区域内,以每一像素位置(r,c)为中心,形成于模板窗口同样大小的搜索区域,计算模板窗口于搜索窗口之间的相关系数;
(5)确定相关系数阈值T,将相关系数大于阈值的搜索窗口作为模板窗口的备选共轭窗口,相应的搜索窗口中心作为模板窗口中心的共轭点
(6)结合其它知识或准则,在候选的共轭窗口中确定最终的匹配窗口
(7)对每一个新的模板位置,重复2-7步,直到所有模板窗口中心处理完毕
(8)根据整体一致性或基于先验目标空间的知识,分析匹配结果的精度
四、最小二乘影像匹配
原理:
以局部范围内影像的灰度值及其分布作为匹配实体,以搜索窗口的中心位置和形状作为待定参数,通过极小化模板窗口与搜索窗口内影像灰度差的平方和和估计待定参数值,从而确定共轭实体。
注:搜索窗口的中心位置及形状是不断变化的,直至变形窗口和模板窗口内的灰度值达到最小值。
步骤:
(1)赋初值
(2)几何变形
(3)灰度内插(一般用双线性)
(4)辐射畸变改正
(5)计算模板影像窗口与经过几何、辐射校正后的搜索影像窗口内灰度函数的相关系数ρ,判断是否需要迭代
(6)根据X^ = (C’C)-1C’L求解各参数改正值
(7)计算新的各参数值
(8)重复第二步至第七步
(9)计算最佳配准点位置,匹配完成后计算得到匹配点坐标。
五、直接生成DEM的影像匹配
1、垂直线轨迹法影像匹配(VLL法)(最好画图)
步骤:
(1)给定地面点的平面坐标(X,Y)与近似最低点高程Zmin,高程搜索步长ΔZ可由所要求的精度确定
(2)由地面点的平面坐标(X,Y)与可能的高程Zi= Zmin + iΔZ,i = 0,1,2,… 按共线方程计算左右影像上的像点坐标(xi1,yi1)与(xi2,yi2) 1 2 为上标
(3)分别以(xi1,yi1)与(xi2,yi2) 为中心在左右影像上开取影像窗口,计算两窗口的相似性测度,如相关系数ρi
(4)将i的值增加1,重复(2) (3)两步,得到ρ0,ρ1,……ρn,并取最大者ρk,其对应高程Zk = Zmin + kΔZ被认为是地面点A的高程,即Z= Zk
(5)可以利用ρk及其相邻的几个相关系数拟合一抛物线,以其极值对应的高程作为A的高程,从而进一步提高精度;或采用更小的步长ΔZ,在小范围内重复上述过程
2、垂直线轨迹与最小二乘相结合的影像匹配
六、NCC、LSM、VLL法异同及对比
相同点:
都利用灰度、相关系数作为匹配策略
不同点:
像方、物方、精度、速度、结果、初值依赖性
(1)NCC ,LSM:基于像方;VLL基于物方
(2)NCC:最简单、速度最快、最成熟的算法;缺:无法处理影像遮挡、地形断裂及较严重的匹配实体几何畸变等
LSM:速度较慢,精度高;相对于NCC有较好的几何适应性;可以进行误差传播;可以进行粗差检测
LSM缺:依赖于精确的初始值
VLL:能够直接确定物体表面三维点坐标
NCC的限制与改进:
限制:
(1)矩形的影像窗口仅适用于局部影像间仅有平移变形的立体影像匹配
(2)直接利用影像的强度值,没有任何结构分析,对强度值变化非常敏感。
改进:
(1)加权相关系数测度
对标准相关系数进行基于影像灰度值的加权
(2)多窗口(CLR匹配法)
以3种不同形式的模板窗口(center窗口,left窗口、right窗口),选相关系数值最大且大于阈值的一对窗口作为共轭影像片,减少因拍摄角度不同造成的匹配失败的情况发生
(3)窗口变形法
利用匹配成果计算旋转角等变换参数,然后改变模板窗口形状进行匹配,减少影像几何变形的影像
第七章 特征匹配
一、特征匹配概念与步骤
定义:所谓特征匹配(FBM)就是指将从影像中提取的特征作为共轭实体,而将所提特征属性或描述参数作为匹配实体,通过计算匹配实体之间的相似性测度以实现共轭实体配准的影像匹配方法。
步骤:特征提取、特征描述、特征匹配
特征匹配使用的几种场合:
(1)当待匹配的点位于低反差区内
(2)目的只需要配准某些点线或面
(3)在城市中大多数对象是人工建筑物
二、特征匹配----SIFT匹配算法
1、掌握下面四个大流程
2、如何找同名点/相关性测度:d最近/d次最近
步骤:
(1)尺度空间的极值探测
(2)关键点的精确定位
(3)确定关键点的主方向
(4)关键点的描述

主要特点:
(1)SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
(2)独特性好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配
(3)多量性,即使少数的几个物体也可以产生大量SIFT特征向量;
(4)高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
(5)可扩展性,可以很方便的与其它形式的特征向量进行联合;
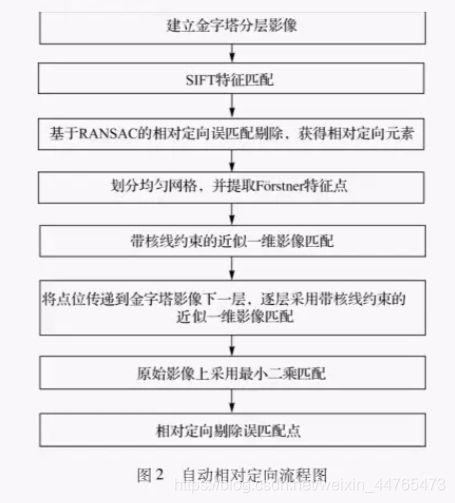
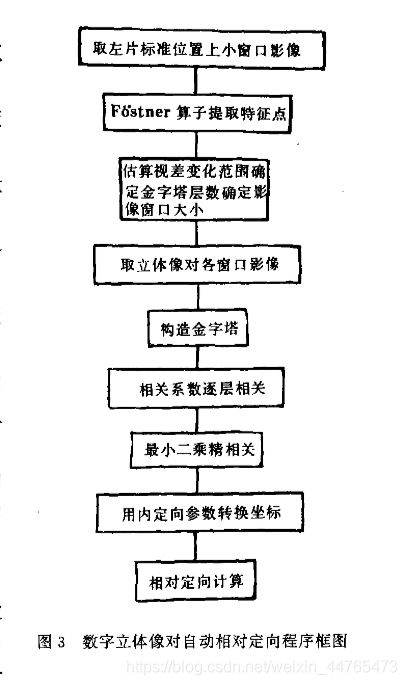
三、思考题:自动相对定向
结合现有知识,怎么实现一个自动、可靠、高效、高精度的相对定向。(综合题目)
(1)建立金字塔分层影像
(2)顶层SIFT特征匹配
(3)结合RANSAC进行粗差剔除,获得相对定向元素
(4)金字塔影像上一层左影像提取Harris/Forstner特征点
(5)在左影像核线约束下对右影像进行近似一维影像匹配
(6)将点位传递到金字塔影像下一层,逐层采用核线约束的一维影像匹配
(7)原始影像采用最小二乘匹配,保证精度
(8)相对定向剔除误匹配点
第八章 数字高程模型
一、数字高程模型概念
地面模型:对地形表面形态的模拟
数字地面模型DTM是地形编码形态等多种信息的一个数字表示。
数字高程模型DEM是用一组有序数值阵列形式表示地面高程的数据集,可以真实完整地反应地表形态;
DEM的主要特点:
(1)易以多种形式显示地形信息
(2)精度不会损失
(3)容易实现自动化、实时化
(4)具有多比例尺特性
DEM数据点的采集方法:地面测量、现有地图数字化、空间传感器、数字摄影测量
数字摄影测量数据采集方法:沿等高线采样、规则格网采样、沿断面采样
渐进采样、选择采样、混合采样、自动化DEM数据采集
二、数字高程模型的内插方法
1、移动曲面内插方法
根据参考点上的高程求出其它待定点上的高程
二次曲面拟合法步骤:
(1)建立局部坐标。对DEM每一个格网点,将坐标原点移至该DEM格网点P(Xp,Yp)
(2)选取邻近数据点。di
(4)计算每一数据点的权。该权重反应该点与待定点的相关程度,与距离有关
(5)法化求解
注意事项:
除满足n>6,保证各象限都有数据点
当地形起伏较大时,半径R不能取很大
当数据点较稀或分布不均匀时,可能产生很大的误差
对于数据点分布不均导致二次移动曲面拟合产生较大误差的问题可以采用平面移动拟合或多个临近点加权平均水平面移动拟合法。
多个临近点加权平均水平面移动拟合法:
采用多个邻近点之加权平均水平面移动拟合法内插

n为临近点个数;pi为地i个数据点的权;zi为第i个数据点的高程
2、多面函数内插方法
“任何一个圆滑的数学表面总是可以用一系列有规则的数学表面的总和,以任意的精度进行逼近。”也就是一个数学表面上
某点(X,Y)处高程Z的表达式为:
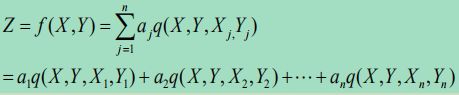
步骤:
(1)选其中n个为核函数的中心点,计算核函数
(2)建立误差方程V = Qa-Z
(3)误差方程法化求解a = (Q’Q)-1Q’Z
(4)求解任意点上的高程,Z = Q’k*a
3、有限元内插方法
原理:为了解算一个函数,把它分成为许多适当大小的“单元”,在每一单元中用一个简单的函数,例如多项式来近似地代表它。
一次样条有限元DEM内插

(1)误差方程式。若 A点是已知高程点,作为观测值,以格网高程Zi,j…作为待定的未知数
(2)虚拟观测值误差方程式。
(3)联立误差方程式
4、三角网数字高程模型构建
(1)将原始数据分块。以便快速检索出三角形相邻的点,而不必检索所有数据。
(2)确定第一个三角形。选取点并计算顶点的角余弦。
(3)三角网的扩展(向外扩展的处理,重复与交叉的检测)
5、DEM的精度及存储管理
DEM的精度评定:
在DEM内插时,预留一部分数据点作为检查点,在建立DEM之后,由DEM内插出这些点的高程。
DEM的精度:

DEM的存贮管理:
DEM数据文件的存贮:文件头+各格网点高程
DEM数据的压缩:
1、整型量存贮,将高程数据减去一常数Z0
2、差分映射
相邻数据间的增量,数据范围较小,可以利用一个字节存贮一个数据,
3、差分游程法(增量游程法 )
当差分的绝对值大于127时,将该数据之前的数据作为一个游程
4、小模块差分法(小模块增量法 )
将DEM分成较大的格网——小模块,每一模块包含5 X 5或10 X 10个DEM格网
5、压缩编码
用位数(bit)最短的码表示出现概率最大的数
概率较小数用位数较长的码表示
三、DEM内插分类(矩形格网和三角网TIN)
1、基于矩形格网的DEM多项式内插
2、基于三角网的DEM多项式内插


四、基于矩形格网DEM自动绘制等高线

五、基于三角网的等高线绘制
(1)确定等高线高程。由高程的最低点和最高点确定等高线最低点和最高点
(2)按照三角形个数,设计一个标记数组Flag(n),初始化为0
(3)对于给定高程Zk,按照三角形表与每一个三角形比较。一直找到有交点的边为起点,然后内插平面坐标(X,Y)
(4)搜索离去边(即下个三角形的进入边),并内插平面坐标,方法同3,只需要处理两边。并将当前三角形flag置为1
(5)进入相邻三角形,重复第(4) 步,直至离去边没有相邻三角形(此时为开曲线)或者相邻三角形为起点三角形(此时为闭曲线)为止
七、单像量测
- 进行空间后方交会,确定方位元素; 2) 量测像点坐标(x,y); 3) 取高程近似值Z,计算出地面平面坐标近似值; 4) 由平面坐标及DEM内插出高程Z; 5) 重复3)、4),直至内插的点没有变化
六、思考题
1、给定一副立体相对/给定一个已知精确内外方位元素的立体影像,怎么获得规则格网DEM?
(1)由内外方位元素进行核线纠正
(2)利用相关系数法进行影像匹配
(3)前方交会获得三维点
(4)移动曲面拟合获得DEM格网点/三角网内插获得格网点
(5)解上面的具体流程
2、有一些离散的三维点,怎么获得等高线。(内容较多,着重复习)
(1)内插规则格网,跟踪等高线
(2)构建三角网,跟踪等高线
第九章 数字微分纠正
一、数字微分纠正概念
根据有关的参数与数字地面模型,利用相应的构像方程式,或按一定的数学模型,将原始构像的非正射投影的数字影像变换为正射投影的数字影像。
二、框幅式中心投影影像的数字微分纠正
数字微分纠正的基本原理:
点元素纠正-线元素纠正-面元素纠正
基本任务:实现两个二维图像之间的几何变换
正反解需要掌握
正解法(直接法): 由原始像点坐标(x,y)出发求纠正后的像点坐标(X,Y)。
反解法(间接法): 由纠正后的像点坐标(X,Y)出发,反求其在原始影像上的像点坐标(x,y)。
反解法(间接法)数字微分纠正:
计算地面点坐标
计算像点坐标
灰度内插(最邻近、双线性、双三次)
灰度赋值
根据框标解算参数,数字摄影测量的内定向
正解法(直接法)数字微分纠正:
过程:从原始图像出发,将原始图像上的逐个像素用正解公式求得其纠正后的像点坐标。
缺点:
(1)纠正图像上所得的像点非规则排列,有的像素可能空白(无像点),有的可能重复,难以实现灰度内插,获得规则排列的纠正后数字影像。
(2)正算公式中的Z未知,需要不断迭代求解。
线性阵列扫描影像间接法纠正:

线性阵列扫描影像直接法纠正:

直接法与间接法结合
(1)规则格网点对应的地面坐标的解算。直接法得到地面一非规则格网
(2)内插出地面规则格网点对应的像点
(3)各地面元对应像素坐标的计算。类似于间接法进行纠正
可以加上精度检验与质量控制
三、基于RPC的正射纠正
(1)计算地面点坐标X = X0+MX’;Y = Y0+Y0+MY’;
(2)由DEM内插高程Z,正则化地面坐标
(3)计算正则化像点坐标
(4)由正则化参数计算像点像素坐标
(5)灰度内插
(6)灰度赋值
四、正射影像镶嵌
一、真正射纠正的一般流程
(1)利用DSM进行正射纠正,改正由地形起伏和建筑物造成的投影差
(2)检测并标识被建筑物遮挡的区域
(3)合并相邻的正射影像,对被遮挡区域进行填充
无缝镶嵌:影像匀光、影像匀色、影像镶嵌及羽化
数字表面模型(DSM): 是指包含了地表建筑物、桥梁和树木等高度信息的地面高程模型。相比DEM只包含了地形的高程信息而未包含其它地表信息而言,DSM在DEM的基础上,进一步涵盖了除地面以外的其它地表物体的高程信息。
真正射影像(TDOM)::即利用数字表面模型,采用数字微分纠正技术改正原始影像的几何变形,经影像重采样后,使影像视角被纠正为垂直视角而形成的影像图。
消隐/遮挡检测-Z-buffer算法
Z-buffer算法思想:
在一条投影光线上离镜头距离近的地面点遮挡距离较远的点,其核心是构建一个等同于原始影像大小的2维实数矩阵ZM,其中存储地面点到透视中心的距离Z,并用一个较大的数字进行初始化。
Z-buffer算法步骤:
(1)初始化一个和影像大小一样的D矩阵,用于存储(X,Y,Z)到透射投影中心的距离,简称Z距离
(2)计算(X,Y,Z)投影行列号(i,j ),并计算Z距离,if Z < D(i,j) D(i,j) = Z; else D(i,j) 不变。
(3)反解法正射纠正,如果(X,Y,Z)被遮挡,则正射影像相应位置用0或 者255填充
第九、十章 一般数字摄影测量流程
(1)数字影像的获取
(2)内定向
(3)外定向(相对定向与绝对定向)
(4)建立核线影像
(5)影像匹配
(6)建立数字地面模型
(7)自动绘制等高线
(8)数字正射影像生成
(9)数字测图
(10)地图编辑与注记